
Fターム[3D232DA32]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041) | ヨー角変位 (138)
Fターム[3D232DA32]に分類される特許
1 - 20 / 138
車両用操舵装置及び荷役車両
【課題】車両旋回時、特にハンドルの戻し時に運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
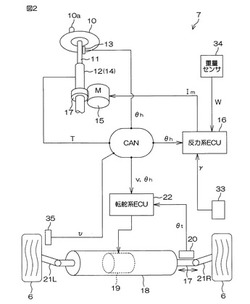
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、車体のヨー角を検出するヨー角検出部33と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、ヨー角検出部33によって検出された車体のヨー角の変化に基づいて車体の旋回量を観測し、観測された旋回量が基準角以上であれば、前記操舵部材に付与する操舵反力を、通常よりも増大させる。
(もっと読む)
車線維持支援装置

【課題】 車線維持支援制御時にドライバが操舵力を緩めたときのドライバの違和感を抑制する車線維持支援装置を提供すること。
【解決手段】 走行車線に対する自車両の横変位に応じて操舵反力アクチュエータにより発生させる操舵反力を演算し、付加反力指令値の方向と操舵の方向との比較に基づき、横変位と操舵速度に応じて付加操舵反力指令値を減少させる補正値を演算するようにした。
(もっと読む)
操舵支援装置
【課題】車両がカントのある路面を走行している場合に、路面の低い側に車両を換向させるガイダンストルクが与えられたときに、操舵角速度および操舵角変化量が過度に大きくなるのを抑制することができる操舵支援装置を提供する。
【解決手段】操舵角速度閾値設定部52は、ガイダンストルク指令値TG*と車速Vとに基づいて、操舵角速度閾値Vhthを設定する。速度偏差演算部52は、操舵角速度演算部51によって演算された操舵角速度の絶対値|Vh|と操舵角速度閾値Vhthとの偏差ΔVhを演算する。ゲイン設定部54は、速度偏差ΔVhhに基づいて、ゲインGを演算する。ゲイン乗算部55は、ゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*を求める。
(もっと読む)
インホイールシステムを利用した車線維持補助システム
【課題】 インホイールシステムを利用した車線維持補助システムを提供する。
【解決手段】 車両走行中の車線離脱危険度を判断する段階、車線維持補助のための必要ヨーレートを演算する段階、前記演算された必要ヨーレートと実際ヨーレートとの差による要求ヨーレートを算出する段階、前記要求ヨーレートを実現するためのトルクベクタリング駆動力配分量を演算する段階を含むインホイールシステムを利用した車線維持補助システムであり、車線離脱の危険がある場合、操向トルクを用いないので運転手に違和感を与えず、後輪駆動力の変化を利用することによって違和感を最小にすることを特徴とする。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】車両の搭乗者による回転操作によって車両の操舵方向が指示されるステアリングホイール13が設けられており、新たな走行軌道を選択して設定すべき判定エリアに車両1が位置した場合は、搭乗者によるステアリングホイール13の回転操作に基づいて、車両1が操舵され(S5)、その車両1の操舵に基づいて実際に車両1に発生したヨーレートを用いて所定時間後の車両位置を第1車両位置予測処理(S7)により予測する。これにより、車両1が走行している路面の傾きに左右されることなく、搭乗者の進行したい方向を正確に把握できる。よって、搭乗者の進行したい方向を正確に汲み取りながら走行軌道を選択して自動走行を行うことができる。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
車両運動制御装置及びプログラム
【課題】ドライバの視線と走行路との交点に到達するまでの時間が小さい状況における車両軌跡追従特性のダンピンの悪化を改善し、軌跡追従特性に優れた車両運動を実現する。
【解決手段】注視時間算出部30で、内向きカメラ12で撮像されたドライバの顔画像、外向きカメラ14で撮像された車両前方画像、及び車速センサ16で検出された車速Vに基づいて、注視時間Tを算出し、注視時間判定部32で、注視時間Tが予め定めた閾値Tthより小さいか否かを判定し、T<Tthの場合には、ダンピング変更部36で、ヨー角検出部34で検出された自車両のヨー角θと目標軌跡のヨー角θdとの差と、予め定めたダンピング特性とフィードバックゲインkp1との関係を示すテーブルに基づいて取得された必要なダンピング特性を得るためのkp1との積で表される偏差フィードバックδf_addを算出し、前輪舵角装置20へ出力する。
(もっと読む)
車両の走行制御装置
【課題】ドライバ操舵との干渉による違和感を緩和しつつ、操舵入力情報を検出するデバイスの機能失陥時においても好適な軌跡追従性を確保する。
【解決手段】車両の走行制御装置は、車両の軌跡が目標路に近付くように舵角可変手段を制御する軌跡制御手段と、車両の運転者によりハンドルを介して操舵入力軸に与えられる操舵入力に関する操舵入力情報を取得する取得手段と、取得された操舵入力情報に応じて軌跡制御手段による軌跡制御の応答性を変更すると共に、操舵入力が取得出来ない場合に軌跡制御の応答性を向上させる応答性変更手段とを具備する。
(もっと読む)
車両の操舵制御装置
【課題】荷物の積載状態に拘わらず、安定した制御性能を得ることが可能な車両の操舵制御装置の提供。
【解決手段】車両質量演算部41は、変位センサ36が検出した相対変位HFL,HFR,HRL,HRRを用いて車両の質量を算出する。ヨー慣性モーメント演算部43は、車両質量演算部41が算出した車両の質量からヨー慣性モーメントを算出する。状態フィードバックゲイン演算部44は、車両質量演算部41が算出した車両の質量と、ヨー慣性モーメント演算部43が算出したヨー慣性モーメントIとを用いて、目標操舵角を入力量とする操舵系の状態方程式を設定し、設定した状態方程式に対する評価関数を設定し、設定評価関数を最小とする状態フィードバックゲインを、LQ制御側に従って算出する。目標操舵角演算部45は、算出された状態フィードバックゲインKを用いて、車両を目標進路に従って走行させるための目標操舵角を算出する。
(もっと読む)
車線逸脱防止装置
【課題】走行車線から逸脱する傾向にある自車両を走行車線にスムースに復帰させるためのステアリング操作を的確に補助する上で有利なレーン逸脱防止装置を提供する。
【解決手段】車線逸脱判定手段38Aは自車両が走行車線から逸脱する傾向にあるか否かを判定する。修正用走行軌跡算出手段38Cは自車両が走行車線から逸脱する傾向にあると判定された場合に、自車両が走行車線の中心線に戻るために自車両が走行すべき軌跡である修正用走行軌跡を算出する。理想操舵トルク算出手段22Bは、ステアリング1402が前記の修正用走行軌跡に沿って自車両が走行するように操作された場合に操舵機構1406で発生する操舵トルクを理想操舵トルクとして算出する。第2の操舵補助トルク決定手段22Cは、ステアリング1402が操作された場合に操舵機構1406で発生する操舵トルクが理想操舵トルクに合致するように操舵補助トルクを決定する。
(もっと読む)
運転支援装置
【課題】簡易な方法で、画像認識の妨げとなるようなものが走行路面に存在していても、安定したLKA制御およびLDW制御を行うことのできる運転支援装置を提供する。
【解決手段】運転支援装置は、車両前方を撮像する撮像手段と、撮像手段が撮像した画像から走行路面の区画線を検出し、走行レーンを設定する設定手段と、当該走行レーンに沿って走行できるように車両の運転者が行うハンドル操作を補助する操舵補助手段と、車両が区画線から逸脱することが予想される場合に警告する警告手段と、撮像手段が撮像した画像から道路標識および道路標示の少なくとも一方を検出し、当該検出結果に基づいた情報を道路情報として算出する道路情報算出手段と、当該道路情報に基づき区画線の検出精度が低下すると予想される場合、操舵補助手段が行う補助動作および警告手段が行う警告動作を抑制する動作抑制手段とを備える。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両を自律走行させる場合に車両の搭乗者に与える不快感を軽減できる走行制御装置および走行制御方法を提供すること。
【解決手段】車両1を自律走行させると、運転者を含む搭乗者に前触れもなく、突然切り返しが行われる場合があり、予測の困難な前後Gが車両1の搭乗者に加わることがある。本実施形態の走行制御装置100は、車両1の前進および後退を切り換える切り返し地点に車両1が到着する場合に、車両1の車両速度Vに基づいてクッションタイムを設定する。クッションタイムが設定されると、切り返し地点において車両1が所定時間停車させられるので、車両1が停車している間に、車両1の搭乗者に加わっている前後Gを緩和させることができる。よって、車両1の搭乗者に与える不快感を軽減できる。
(もっと読む)
走行支援装置および走行支援方法
【課題】少ない処理コストで初期位置から目標位置までの車両の走行経路を運転者に提供できる走行支援装置および走行支援方法を提供すること。
【解決手段】本実施形態では、経路パターンPT1〜PT10の組み合わせに基づいて、2m間隔で大まかに経路点Pを生成し走行経路RT1を生成しても、その後、走行経路RT1の各経路点P間に、0.05m間隔で仮想的に走行制御点Qを生成できる。よって、経路パターンPT1〜PT10に対応する各走行経路の長さCLを短く(例えば、0.05mなど)しておき、詳細に走行経路RT1を生成したり、経路パターンPT1〜PT10のパターンの種類を多数設けて記憶しておく必要が無いので、処理コストを抑制できる。従って、走行支援装置100によれば、少ない処理コストで初期位置から目標位置までの車両の走行経路RT1〜RT3を運転者に提供できる。
(もっと読む)
走行支援装置および走行支援方法
【課題】車両が通過する予定の領域を精度良く、且つ、容易に設定して、その領域に物体が存在するか否かを判定できる走行支援装置および走行支援方法を提供すること。
【解決手段】走行制御点Qは、走行経路RT1〜RT3上に仮想的に設けられた点であるので、その走行制御点Qにおける障害物判定領域Eは、実際の走行領域F1の一部である。よって、各走行制御点Qにおける障害物判定領域Eを全て足し合わせた領域は、車両1が実際に走行する走行領域F1の一部となるので、障害物判定領域Eを全て足し合わせた領域F3を、車両1の走行領域とみなすことができる。従って、車両1が実際に走行する領域F2を算出しなくても、走行経路RT1〜RT3に対応する走行領域を精度良く、且つ、容易に設定でき、その走行経路RT1〜RT3に対応する走行経路内に、障害物が有るか否かを判定できる。
(もっと読む)
走行支援装置および走行支援方法
【課題】走行支援する経路上に物体があるかを少ない処理コストで判定できる走行支援装置および走行支援方法を提供すること。
【解決手段】走行制御点Qは、走行経路RT1〜RT3上に仮想的に設けられた点であるので、その走行制御点Qにおける障害物判定領域Eは、実際の走行領域F1の一部である。よって、各走行制御点Qにおける障害物判定領域Eを全て足し合わせた領域を、車両1の走行領域とみなすことができるので、各走行制御点Qごとに、その車両1の障害物判定領域E内に障害物が存在するか否かを判定することで、走行経路RT1〜RT3上に障害物が存在するか否かを判定できる。従って、車両1が実際に走行する走行領域F1を算出しなくて済むので、複雑な領域の計算を行わなくて良く、処理コストを抑制できる。その結果、走行支援する経路上に障害物があるかを少ない処理コストで判定できる。
(もっと読む)
車線逸脱防止支援装置
【課題】自車両の左右いずれか一方の側にしか車線区画線を検出できない場合であっても、車線逸脱防止支援を正確に行うことができる車線逸脱防止支援装置の提供。
【解決手段】自車両の斜め前方を含む前方を撮像する撮像手段と、撮像手段により撮像された前方画像に基づき、車線区画線を検出する車線区画線検出手段と、車線区画線検出手段により検出された車線区画線と自車両の位置関係に基づき、自車両の車線逸脱防止を支援する支援手段と、車線区画線検出手段により左右いずれか一方にのみ車線区画線が検出された場合、検出された車線区画線と自車両との距離が所定値未満であるかどうかを判定する判定手段と、判定手段により距離が所定値未満であると判定された場合、支援手段を休止モードから支援可能モードに移行させ、距離が所定値以上であると判定された場合、支援手段を休止モードのまま維持するモード設定手段とを備える。
(もっと読む)
車両の制御装置
【課題】レーンキープ制御とドライバの操舵意思を反映した操舵制御との干渉を制御品質を低下させることなく防止する。
【解決手段】本発明に係る車両の制御装置は、転舵輪に対し該転舵輪の舵角の変化を促す操舵力を付与可能な操舵力付与手段を備えた車両において、維持すべき目標走行路と車両との相対的位置関係を規定する位置状態偏差を検出する偏差検出手段と、検出された位置状態偏差に基づいて操舵力付与手段の制御量を決定する決定手段と、決定された制御量に従って操舵力付与手段を制御することにより車両の走行路を目標走行路に維持する制御手段と、ドライバの操舵入力を検出する操舵入力検出手段と、走行路が目標走行路に維持される期間において操舵入力が検出された場合に、この操舵入力が反映されるように操舵力付与手段の制御量の決定基準を補正する補正手段とを具備する。
(もっと読む)
車両の操舵支援制御装置
【課題】ドライバ状態に応じて、ドライバに適切に関与しながら進行路を維持するようにドライバを導きつつ制御して操舵支援する。
【解決手段】前方注視距離ztにおける目標通過点PcのX座標xcと推定通過点PeのX座標xeを算出し、これら座標xc、xeの偏差に第1の制御ゲインGlを乗算した演算項と、ヨー角θcaに第2の制御ゲインGyを乗算した演算項とを加算して制御量Tcを算出する。ここで、第1、第2の制御ゲインGl、Gyは、手放し時間Tsoが長いほど、自車両が目標進行路を走行する操舵制御の整定時間が短くなる方向(Gl、Gyが、それぞれ大きな値)に設定される一方、手放し状態が検出されない場合は、覚醒度DAが低い、或いは、漫然度DLが高い場合ほど、自車両が目標進行路を走行する操舵制御の整定時間が短くなる方向(Gl、Gyが、それぞれ大きな値)に設定される。
(もっと読む)
車両物理量推定装置
【課題】スリップ角を精度よく推定することができる車両物理量推定装置を提供する。
【解決手段】車両物理量推定装置1は、車両物理量を推定するECU5と、車両Xのヨー角θを検出する車載カメラ4と、を備えている。この車両物理量推定装置1では、ECU5の車両物理量オブザーバ5aで推定したヨー角推定値θ^と車載カメラ4で検出したヨー角θとからオフセット誤差αが算出される。そして、このオフセット誤差αでもって、車両物理量オブザーバ5aで推定されたスリップ角推定値β^が補正される。つまり、スリップ角推定値β^が、検出したヨー角θ及び推定したヨー角推定値θ^に基づいて補正されることとなる。
(もっと読む)
車両用運転支援装置及び車両用運転支援方法
【課題】運転者の運転操作に応じて適切に運転支援を行うことができる車両用運転支援装置及び車両用運転支援方法を提供する。
【解決手段】運転者の運転操作と自車両の走行環境とを検出し、検出した運転操作が自車両の走行環境に応じた運転目的(前方物体との接触回避など)を達成不可能な運転操作であるとき、当該運転目的を達成するための運転操作支援力を発生するべく、操作支援アクチュエータを駆動制御する。ここでは、操舵および制動の少なくとも一方により運転操作支援を行う。
(もっと読む)
1 - 20 / 138
[ Back to top ]