
Fターム[3D232DA36]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041) | ロール (107)
Fターム[3D232DA36]に分類される特許
1 - 20 / 107
電動パワーステアリング制御装置
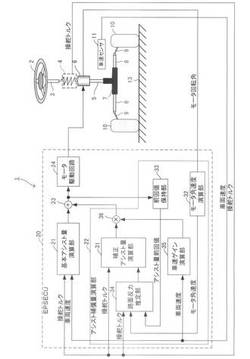
【課題】車両のヨー応答を低下させることなくロール振動を抑制する
【解決手段】EPSシステム1では、アシスト補償量演算部22が、車両の運転者によるハンドルの操作が反映された操舵トルクと、車両の挙動が反映された推定路面反力とに基づき、次の(a)および(b)の2つのゲイン特性を満たすようにアシスト補償量を演算する。(a)操舵トルクに対する補正アシスト量のゲイン特性については、操舵トルクの周波数が予め設定された第1設定周波数を超えると、周波数が高くなるにつれて補正アシスト量のゲインが徐々に減少する1次フィルタの形状を有する。(b)推定路面反力に対する補正アシスト量のゲイン特性については、推定路面反力の周波数が、第1設定周波数より高くなるように予め設定された第2設定周波数になるまでは、周波数が高くなるにつれて補正アシスト量のゲインが徐々に増加する、推定路面反力の微分特性を有する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法

【課題】旋回走行時に車体を旋回内側に傾動させる制御の精度を向上させる。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を算出し、旋回走行時における旋回外側へのロール運動分に相当する補償量φrを算出する。そして、目標対地傾斜角φ*及び補償量φrに応じて、駆動モータ3を駆動制御する。また、一次の応答遅れ特性をもつ車両モデル(Gy0(s))に従い、横加速度に応じて補償量φrを算出すると共に、車両モデル(Gy0(s))の時定数を、ロール等価粘性Cφとロール剛性Kφとの比に応じて決定する。また、車両モデル(Gy(s))に従い、運転者のステアリング操作及び車速に応じて、車体の横加速度を推定し、推定した横加速度に応じて補償量φrを算出する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】車両の搭乗者による回転操作によって車両の操舵方向が指示されるステアリングホイール13が設けられており、新たな走行軌道を選択して設定すべき判定エリアに車両1が位置した場合は、搭乗者によるステアリングホイール13の回転操作に基づいて、車両1が操舵され(S5)、その車両1の操舵に基づいて実際に車両1に発生したヨーレートを用いて所定時間後の車両位置を第1車両位置予測処理(S7)により予測する。これにより、車両1が走行している路面の傾きに左右されることなく、搭乗者の進行したい方向を正確に把握できる。よって、搭乗者の進行したい方向を正確に汲み取りながら走行軌道を選択して自動走行を行うことができる。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
移動体の操舵反力調整装置
【課題】運転者の疲労状態により適した操舵反力に近づくように当該操舵反力を調整可能とすることを目的とする。
【解決手段】操舵反力用コントローラ6は、筋力検出部11と、疲労推定部12と、反力調整部13とを備える。筋力検出部11は、筋骨格モデルとアドミタンス計測手法をもちいて、運転者の肩部から手までに位置する腕の筋肉のうちから選択した複数の筋の筋力を推定する。そして、推定した複数の筋の疲労度と操作子の操舵状態とに基づき、操作子に付加する操舵反力を調整する。
(もっと読む)
車両用制御装置
【課題】車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる車両用制御装置を提供すること。
【解決手段】キャンバ角調整手段によりキャンバ角調整装置44が作動され後輪のキャンバ角が調整されて後輪にネガティブキャンバが付与される。ネガティブキャンバの付与により後輪に発生するキャンバスラストを利用して、車両の走行安定性を確保できる。また、キャンバ角調整手段により後輪にネガティブキャンバが付与される場合に、コーナリングフォース変更手段により前輪の等価コーナリングフォースが変更される。前輪の等価コーナリングフォースが変更されることにより、車両の操縦性の指標である操安キャパシティを変更することができ、車両の操縦性を制御できる。これにより、車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる。
(もっと読む)
走行制御装置
【課題】車両を目標位置まで自律走行させる場合に、車両が目標位置へ到着する可能性を向上させることができる走行制御装置を提供すること。
【解決手段】走行制御装置100は、車両1の走行中に、前回の補正が行われた時に設定された直線距離daと、現在の車両1の車両位置から目標とする駐車位置Oまでの直線距離dnとを比較し、直線距離dnが直線距離daよりも短くなる場合に、目標とする駐車位置Oの再認識を試みる。これにより、車両1が目標位置Oに近づく度に、目標とする駐車位置Oを再認識できるので、再認識された駐車位置O’に含まれる誤差を徐々に(段階的に)低下させることができる。よって、目標とする駐車位置Oの特定精度を徐々に(段階的に)向上させることができるので、車両1が目標とする駐車位置Oに到着する可能性を向上させることができる。
(もっと読む)
車両
【課題】後輪が操舵輪である車両において、旋回時の操縦性の低下を抑制する。
【解決手段】車両は、後輪の転舵により旋回させられるが、旋回方向は後輪の転舵方向とは逆向きになる。また、後輪の転舵に伴ってヨーレイトが生じるが、車両の重心に作用する横加速度は遅れる。横加速度が、過渡的に、逆向きに作用することがあるのである。それに対して、ヨーレイトγtgtに基づいてリーン角の目標値φrefが決定され、リーンアクチュエータが制御されるようにすれば、キャンバスラストが作用するため、その分、横加速度のヨーレイトに対する遅れを小さくすることができ、操縦性の低下を抑制することができる。
(もっと読む)
車両用制御装置
【課題】燃費の悪化や車輪の偏摩耗が生じることを防ぐと共に、車両の走行安定性を向上させることのできる車両用制御装置を提供すること。
【解決手段】車両用制御装置100は、スリップ角に対するセルフアライニングトルクを角度で微分した角度微分値が所定の第1閾値以下であるかを判断し、角度微分値が第1閾値以下であると判断される場合に車輪のキャンバ角を調整する第1キャンバ角調整手段を備えているので、横力が飽和してグリップ力の限界に近付くことを予測し、車輪のグリップ力が限界を超える前にキャンバスラストを発生させて、著しいアンダーステア傾向、オーバーステア傾向やスピンなどの発生を未然に防止することができる。これにより、車両の走行安定性を向上させることができると共に、長時間に亘ってキャンバ角が付与されることによる燃費の悪化や車輪の偏摩耗が生じることを防止できる。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両を自律走行させる場合に車両の搭乗者に与える不快感を軽減できる走行制御装置および走行制御方法を提供すること。
【解決手段】車両1を自律走行させると、運転者を含む搭乗者に前触れもなく、突然切り返しが行われる場合があり、予測の困難な前後Gが車両1の搭乗者に加わることがある。本実施形態の走行制御装置100は、車両1の前進および後退を切り換える切り返し地点に車両1が到着する場合に、車両1の車両速度Vに基づいてクッションタイムを設定する。クッションタイムが設定されると、切り返し地点において車両1が所定時間停車させられるので、車両1が停車している間に、車両1の搭乗者に加わっている前後Gを緩和させることができる。よって、車両1の搭乗者に与える不快感を軽減できる。
(もっと読む)
走行支援装置および走行支援方法
【課題】走行支援する経路上に物体があるかを少ない処理コストで判定できる走行支援装置および走行支援方法を提供すること。
【解決手段】走行制御点Qは、走行経路RT1〜RT3上に仮想的に設けられた点であるので、その走行制御点Qにおける障害物判定領域Eは、実際の走行領域F1の一部である。よって、各走行制御点Qにおける障害物判定領域Eを全て足し合わせた領域を、車両1の走行領域とみなすことができるので、各走行制御点Qごとに、その車両1の障害物判定領域E内に障害物が存在するか否かを判定することで、走行経路RT1〜RT3上に障害物が存在するか否かを判定できる。従って、車両1が実際に走行する走行領域F1を算出しなくて済むので、複雑な領域の計算を行わなくて良く、処理コストを抑制できる。その結果、走行支援する経路上に障害物があるかを少ない処理コストで判定できる。
(もっと読む)
走行支援装置および走行支援方法
【課題】少ない処理コストで初期位置から目標位置までの車両の走行経路を運転者に提供できる走行支援装置および走行支援方法を提供すること。
【解決手段】本実施形態では、経路パターンPT1〜PT10の組み合わせに基づいて、2m間隔で大まかに経路点Pを生成し走行経路RT1を生成しても、その後、走行経路RT1の各経路点P間に、0.05m間隔で仮想的に走行制御点Qを生成できる。よって、経路パターンPT1〜PT10に対応する各走行経路の長さCLを短く(例えば、0.05mなど)しておき、詳細に走行経路RT1を生成したり、経路パターンPT1〜PT10のパターンの種類を多数設けて記憶しておく必要が無いので、処理コストを抑制できる。従って、走行支援装置100によれば、少ない処理コストで初期位置から目標位置までの車両の走行経路RT1〜RT3を運転者に提供できる。
(もっと読む)
走行支援装置および走行支援方法
【課題】車両が通過する予定の領域を精度良く、且つ、容易に設定して、その領域に物体が存在するか否かを判定できる走行支援装置および走行支援方法を提供すること。
【解決手段】走行制御点Qは、走行経路RT1〜RT3上に仮想的に設けられた点であるので、その走行制御点Qにおける障害物判定領域Eは、実際の走行領域F1の一部である。よって、各走行制御点Qにおける障害物判定領域Eを全て足し合わせた領域は、車両1が実際に走行する走行領域F1の一部となるので、障害物判定領域Eを全て足し合わせた領域F3を、車両1の走行領域とみなすことができる。従って、車両1が実際に走行する領域F2を算出しなくても、走行経路RT1〜RT3に対応する走行領域を精度良く、且つ、容易に設定でき、その走行経路RT1〜RT3に対応する走行経路内に、障害物が有るか否かを判定できる。
(もっと読む)
操舵装置
【課題】操舵フィーリングに対する違和感を運転者に与えることを抑制することができる操舵装置を提供すること。
【解決手段】前輪11側のロール剛性あるいは後輪12側のロール剛性の少なくともいずれか一方を制御でき、制御により前輪側のロール剛性と後輪側のロール剛性とのロール剛性の比を可変に設定可能なロール剛性制御手段を備えた車両1に設けられ、運転者により操舵用の操作部材15に入力される操舵力を補助する補助力を出力し、操舵力と補助力とにより操作部材と機械的に接続された前輪を転舵する操舵装置2であって、補助力は、ロール剛性の比に基づいて変化する。
(もっと読む)
自動二輪車の操舵装置
【課題】パワーアシスト手段で低速時の自動二輪車の姿勢制御を行い、レシオ可変手段を用いて全速度域での最適な操舵比が得るようにした自動二輪車の操舵装置を提供する。
【解決手段】ハンドル5へ入力される入力トルクMzに応じて第2モータM2による補助操舵力を与えるパワーアシスト手段W1と、ハンドル5の回動角度と前輪WFの操舵角度との比率である操舵比jを第1モータM1によって変更する操舵比可変手段S1と、車速Vを検知する車速検知手段92と、入力トルクMzを検知する入力トルク検知手段48と、操舵比jを検知する操舵比検知手段92と、車体のロール方向の角速度ωを検知するロール角速度検知手段93と、第1,第2モータM1,M2を制御する制御部100とを具備し、制御部100は、第2モータM2を車速V、入力トルクMzおよびロール方向の角速度ωに基づいて制御し、第1モータM1を車速Vおよび操舵比jに基づいて制御する。
(もっと読む)
車両の制御装置
【課題】後輪操舵制御装置とアクティブサスペンション装置とを備えた車両がダブルレーンチェンジ等の速い切り返しが為される際に発生するロールの違和感を抑制する制御装置を提供する。
【解決手段】本発明は、後輪操舵制御装置10とアクティブサスペンション装置6,7とを備えた車両の制御装置12である。本制御装置は、前記車両の横加速度Gy、前輪舵角、後輪舵角、ロール角を含む運動状態量を検出する運動状態量検出手段と、前記横加速度と前記前輪舵角との相関を算出して、予め設定された標準値と比較し、横加速度修正量を算出する横加速度修正量算出手段125と、前記横加速度修正量と前記横加速度とからロール角制御量を算出するロール角制御量算出手段124と、前記ロール角制御量と前記ロール角とから前記アクティブサスペンションのロール角制御量を算出するロール姿勢制御手段126とを備えることを特徴とする。
(もっと読む)
車両の後輪操舵制御装置
【課題】アクティブサスペンション装置の制御失陥により車両がロール方向に傾いた状態に保持されたときに車両が直進するように後輪を操舵する制御装置を提供する。
【解決手段】車輪を車体に懸架するサスペンション7をアクチュエータで駆動するアクティブサスペンション装置が設けられた車両の左右後輪を操舵制御する後輪操舵制御装置である。この装置は、車両の運動状態量を検出する状態量検出手段17,18,19を備えている。そして、アクティブサスペンション装置の制御失陥により車両がロール方向に傾いた状態に保持されたとき、検出された前記運動状態量に基づいてロール角を算出し、このロール角に応じて車両が直進するように後輪を操舵するように構成する。
(もっと読む)
4輪操舵車両
【課題】後輪操舵によって運転性能を高めつつ、後輪操舵を行った際に生じる運転フィールの違和感を低減する。
【解決手段】後輪トー角操舵トルク値設定部32は、操舵トルクTに基づいて、ヨーレイト規範値を設定するヨーレイト規範値設定部、横加速度規範値を設定する横加速度規範値設定部および、ロールレイト規範値を設定するロールレイト規範値設定部と、これら各規範値に基づいてそれぞれ後輪トー角ヨーレイト値を設定する後輪トー角ヨーレイト値設定部、後輪トー角横加速度値を設定する後輪トー角ヨーレイト値設定部および、後輪トー角ロールレイト値を設定する後輪トー角ロールレイト値設定部とを備え、目標後輪トー角設定部33が後輪トー角ロールレイト値を含ませて目標後輪トー角を設定する。
(もっと読む)
車両挙動制御装置
【課題】操舵制御装置によってロール挙動が大きくなることを防ぐ車両挙動制御装置を提供する。
【解決手段】後輪操舵制御のような操舵制御手段22の制御値から、当該制御手段に起因する車体の横加速度を推定し、この横加速度からロールモーメントを推定し、その推定結果に基づいてロール抑制手段4,30のフィードフォワード制御を行う。このため、操舵制御に伴うロールを遅滞なく抑制し、運転フィーリングを向上させることができる。
(もっと読む)
1 - 20 / 107
[ Back to top ]