
Fターム[3D232DD03]の内容
走行状態に応じる操向制御 (73,124) | 制御方式 (7,388) | 制御系の切換 (219)
Fターム[3D232DD03]に分類される特許
201 - 219 / 219
パワーステアリング装置
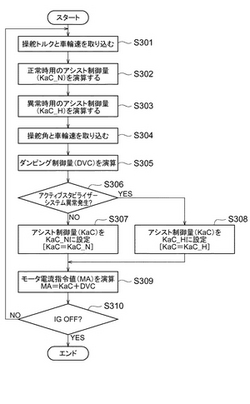
【課題】 アクティブスタビライザが動作異常となったときに、運転者の操舵フィーリングの悪化を防止する。
【解決手段】 パワーステアリングシステムは、操舵トルクと車速に基づいて、正常時用のアシスト制御量KaC_Nと、異常時用のアシスト制御量KaC_Hを演算する(S301〜S303)。また、操舵角速度と車速に基づいて、ダンピング制御量DVCを演算する(S304〜S305)。アクティブスタビライザシステムの動作異常の有無を判定し、正常である場合には正常時用のアシスト制御量KaC_Nとダンピング制御量DVCを加算することでモータ電流指令値MAを演算する(S306,S307,S309)。一方、異常である場合には異常時用のアシスト制御量KaC_Hとダンピング制御量DVCを加算することでモータ電流指令値MAを演算する(S306,S308,S309)。
(もっと読む)
車両の操舵装置

【課題】運転者による操舵ハンドルの操作に対して車両の運動状態を反映させた反力を付与することにより、車両の運転を易しくした車両の操舵装置を提供すること。
【解決手段】車両の操舵装置において、コンピュータプログラム処理により前輪が転舵制御される。転舵角補正部71は転舵角δを横加速度Gに基づき補正転舵角δdaに補正する。転舵角−横加速度変換部72は補正転舵角δdaに基づき見込み横加速度Gdに変換する。横加速度−トルク変換部73は見込み横加速度Gdをべき乗関係にある反力トルクTzに変換する。駆動制御部74は駆動回路56を介して反力モータ14に反力トルクTzを発生させる。これにより、操舵ハンドル11に付与される反力トルクTzは車両の運動状態を反映するとともに人間の知覚特性に合わせて付与されるため、運転者は違和感を覚えることなく車両を簡単に運転することができる。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】 操舵補助制御を継続可能な継続可能異常モードが発生した場合に、最適な条件で操舵補助制御を停止させる。
【解決手段】 モータ駆動系で異常が発生したときに、異常検出回路39でモータ電流検出回路38の異常による軽度の異常であるかモータ駆動回路37、電動モータ12の異常による重度の異常であるかを検出し、軽度の異常であるときに異常時操舵補助制御回路40でオープンループ制御回路30OLを選択して操舵補助制御を継続し、操舵補助力及び車速検出値に基づいて車両状態を検出し、これが停止許可領域であるときに操舵補助制御を停止する。
(もっと読む)
操舵特性の評価方法
【課題】 車両の操舵特性を確実に評価することができる操舵特性の評価方法を提供する。
【解決手段】 所定形状の波形に変化する操舵トルクを操舵機構に付与する操舵トルク付与工程と、付与された操舵トルクに対して変化する操舵機構の操舵角を検出する操舵角検出工程と、検出された操舵トルクに対する操舵角の特性を用いて、操舵特性の評価を行う評価工程と、を含む。
(もっと読む)
伝達比可変操舵装置
【課題】 運転者による操舵ハンドルの回動操作における違和感を抑制し、良好な操舵フィーリングが得られる伝達比可変操舵装置を提供すること。
【解決手段】 VGRSECU46は、操舵ハンドル11の回動操作に伴う操舵入力軸12の回転角速度dΘ/dtと可変ギア比アクチュエータ20のVGRSモータ21の回転角速度dθ/dtを計算する。また、ECU46は、EPSモータ33の作動速度β×Nを計算する。そして、ECU46は、VGRSモータ21を、その回転角速度dθ/dtが算出したEPSモータ33作動速度β×Nよりも小さくなるように、作動制御する。これにより、EPSモータ33に対する負荷が増大してその作動速度β×Nが小さくなっても、VGRSモータ21の回転角速度dθ/dtが作動速度β×Nよりも小さくなるように作動制御することができ、EPSモータ33の追従性を確保することができる。
(もっと読む)
走行経路生成装置
【課題】 経路に段差が生じた場合でも、スムーズで違和感のない操舵を実現できる走行経路生成装置を提供する。
【解決手段】 自車両前方の経路を取得する走行経路取得手段(経路データベースユニット15)と、走行経路に対する自車両の位置を検出する車両位置検出手段(GPS14)と、取得した走行経路を追従するために必要となる操舵量を算出する経路追従操舵量算出手段(追従操舵コントローラ16)と、を有する自動操舵車両において、走行経路取得手段によって取得した経路の段差を検出する経路段差検出手段と、この経路段差検出手段によって検出した走行急変化を車両の走行状態に応じて補正する走行経路補正手段と、を備える。
(もっと読む)
自動操舵装置
【課題】 本発明は、自動操舵装置に関し、車輪の回転方向を検知可能な高機能の車輪速センサを用いることなく車両の移動情報を正確に算出することを目的とする。
【解決手段】 車輪の回転量を検出するための車輪速センサ34、及び、車両前後方向の加速度を検出するための加減速度センサ36を設ける。そして、車輪速センサ34を用いて車両の駐車開始位置からの移動距離を検知し、また、加減速度センサ36を用いて車両の移動方向を検知する。そして、車両の移動方向が正規の方向であるときは、車両の目標移動軌跡に従ってその移動距離に対応した目標舵角が実現されるようにステアリングアクチュエータ24を自動制御し、一方、車両の移動方向が後戻り方向であるときは、その自動制御を中止する。
(もっと読む)
車両の操舵装置
【課題】外部負荷装置等を用いることなく、簡単な構成によりシステムの異常検査ができる。
【解決手段】マスタサブシステム(サブシステムSUBc)は、他のサブシステムSUBa,SUBbが発生する各トルクが転舵機構5にてその転舵方向で互いに反対になるように作用し、かつその絶対値が同じとなるような電流指令値を当該他のサブシステムSUBa,SUBbにそれぞれ供給するとともに転舵機構5の動作を検出し、その検出結果に基づいて、当該サブシステムSUBa,SUBbに異常があるか否かを判定する。
(もっと読む)
ステアリング装置
【課題】 前輪操舵制御または後輪操舵制御の一方が失陥した場合でも、車両挙動の安定性を確保できるステアリング装置を提供する。
【解決手段】 前輪操舵機構12を駆動する前輪操舵アクチュエータ6と、後輪操舵機構15を駆動する後輪操舵アクチュエータ7と、目標ヨーレートと目標横速度に基づいて、前輪操舵アクチュエータ6と後輪操舵アクチュエータ7を駆動制御する操舵制御手段と、を備えるステアリング装置において、前輪操舵アクチュエータ6が失陥したとき、失陥した前輪操舵アクチュエータ6の失陥前後のステアリングギア比の変化率に基づいて、目標ヨーレート特性を変更する目標値補正部と、変更された目標ヨーレート特性に基づいて、後輪操舵アクチュエータ7を駆動制御する失陥時操舵制御手段と、を備える。
(もっと読む)
車両の操舵装置
【課題】システムの変動の抑制を実現しつつマスタサブシステムの変更ができる。
【解決手段】車両の操舵システムは、複数のサブシステムSUBa〜SUBcの誤作動履歴に基づき当該複数のサブシステムSUBa〜SUBcのうちから一のマスタサブシステムを選定するとともに、マスタサブシステムが、目標トルクに基づいて各サブシステムSUBa〜SUBcに指令情報(制御用電流指令値)を出力して、各サブシステムSUBa〜SUBcが、指令情報に基づいて転舵軸モータ11a〜11cを制御する。
(もっと読む)
自動車のパワーステアリング装置
【課題】 小型の油圧ポンプを使用しても操舵フィールを確保することが出来る自動車のパワーステアリング装置を提供する。
【解決手段】 本発明は、電動モータ20で油圧ポンプ22を駆動する自動車のパワーステアリング装置1であって、自動車が後退時であるか否かを検出する後退検出手段19と、電動モータの回転数を車速及び操舵速度に応じて制御する制御手段16(S8)と、を有し、この制御手段は、後退時、油圧ポンプの回転数が前進時より増大するように電動モータを制御する。
(もっと読む)
車両の操舵装置
【課題】 ステヤバイワイヤ方式の操舵装置において、フェイルによりステヤバイワイヤ方式を機械連結方式に切り換える場合でも、運転者が違和感を覚えないようにするとともに車両の操縦安定性を良好に保つ。
【解決手段】 車両の操舵装置は、電磁クラッチ15の切断状態にてステヤバイワイヤ方式に設定され、操舵ハンドル11の操舵操作に応答して、左右前輪FW1,FW2は電動モータ21,22の作動により転舵される。電動モータ21,22をそれぞれ含む第1および第2転舵制御系統の一方のフェイル時に、操舵ハンドル11の操舵操作に対する左右前輪FW1,FW2の転舵特性を、ステヤバイワイヤ用の転舵特性から機械連結式の転舵特性に徐々に変更する。第1および第2転舵制御系統のフェイル時、または前記転舵特性の変更処理後に、電磁クラッチ15を接続状態に設定して、操舵装置を機械連結式に切り換える。
(もっと読む)
パワーステアリング装置
【課題】 車両状態に応じた最適なアシスト力を付与するとともに、より効果的にエネルギー消費の低減を図ることのできるパワーステアリング装置を提供すること。
【解決手段】 マイコン51は、操舵輪の目標舵角である目標タイヤ角θt*と閾値βとの比較により、車両走行時のスタンバイ/アシストモードの切替判定を行うとともに、車速Vが小となるほど、その切替判定に用いる閾値βを大とする。
(もっと読む)
パワーステアリング装置
【課題】 車両状態に応じた最適な伝達比を設定して良好なステアリング特性を得るとともに、圧油供給に伴う圧力損失を抑えてエネルギー消費の低減を図りつつ、最適なアシスト力を付与することができるパワーステアリング装置を提供すること。
【解決手段】 パワーステアリング装置1は、パワーシリンダに供給するフルード流量(供給)を変更可能な流量制御弁15と、その作動を制御する第1ECU(VFCECU)16とを備える。第1ECU(VFCECU)16(マイコン51)は、ステアリング操作に基づくステア転舵角に上乗せされるACT角θtaの制御目標量、即ちACT指令角θta*に基づいて目標タイヤ角θt*を演算する。そして、第1ECU(VFCECU)16は、この目標タイヤ角θt*に基づいて流量制御弁15の制御、即ち流量可変制御を実行する。
(もっと読む)
パワーステアリング装置
【課題】 車両状態に応じて最適なアシスト力を付与するとともに、より効果的にエネルギー消費の低減を図ることができるパワーステアリング装置を提供すること。
【解決手段】 第2ECU(IFSECU)31側のマイコン41は、ギヤ比可変アクチュエータ30の駆動源であるモータ35に駆動電力を供給するためのモータ制御信号のDuty比が所定の閾値よりも大きいか否かを判定し、その結果をACTフラグFactとして第1ECU(VFCECU)16に出力する。そして、第1ECU16(VFCECU)側のマイコン51は、車両停車状態且つ操舵角一定時において、ACTフラグFactが「ON」、即ちモータ制御信号のDuty比が所定の閾値よりも大きい場合には、「アシストON」と判定してその流量制御モードをアシストモードに切り替える。
(もっと読む)
車両用操舵装置
【課題】 反力用アクチュエータに過電流が発生したとき、意図しないステアリングホイールの回転を抑制できる。
【解決手段】 ステップS2で反力用アクチュエータ7の過電流が検出されたとき、ステップS3でクラッチ機構5を締結させ、その後、ステップS5で反力用アクチュエータ7が過電流失陥していると判断されたとき、ステップS6で反力用アクチュエータ7を停止させる。
(もっと読む)
ステアバイワイヤシステム
【課題】 モータに駆動電流を流す回路又はハンドルの操舵位置を検出する位置センサが失陥してもハンドル操作に応じて転舵輪を転舵することが可能でありかつ車両への搭載性にも優れたステアバイワイヤシステムを提供する。
【解決手段】 本発明のステアバイワイヤシステム10では、通常は、ハンドル11の操作に応じてブラシ付DCモータ50への駆動電流が制御されてロータ60の回転量、回転方向が変更され、これによりハンドル11の操作に応じて転舵輪30を転舵することができる。また、異常時には、ハンドル11の操作に伴ってブラシ付DCモータ50に備えたブラシ保持ハウジング53が界磁保持ハウジング52に対して回動し、界磁54とブラシ55,56との相対位置が変更されることでロータ60の回転量、回転方向が変更され、これによりハンドル11の操作に応じて転舵輪30を転舵することができる。
(もっと読む)
車両の操舵装置
【課題】 車速に適した操舵特性に変更可能であり、かつ、人間の知覚特性に合わせて車両の操舵を可能とする車両の操舵装置を提供すること。
【解決手段】 ステアリングバイワイヤ方式の操舵装置において、変位−トルク変換部51は操舵角θを操舵トルクTdに変換する。このとき、車速Vが大きければ操舵角θに対する操舵トルクTdを大きく変換し、車速Vが小さければ操舵角θに対する操舵トルクTdを小さく変換する。トルク−横加速度変換部52は同変換された操舵トルクTdを指数関係にあり人間が知覚し得る見込み横加速度Gdに変換する。転舵角変換部53は見込み横加速度Gdで車両が運動するために必要な目標転舵角δdを計算する。転舵制御部60は転舵輪を目標転舵角δdに転舵制御する。これにより、車速Vに応じて操舵特性を最適に変更することができ、かつ、人間の知覚特性に合わせて車両を旋回させることができる。
(もっと読む)
車両用操舵装置
【課題】 バックアップ手段を備えたステア・バイ・ワイヤシステム方式の車両用操舵装置において、最大転舵角付近での転舵モータの駆動負荷を抑制し、転舵モータの小型軽量化を図る。
【解決手段】 ステアリングホイール9と転舵モータ29,30とを機械的に連結するバックアップ装置2と、バックアップ装置2を解放状態にしてステアリングホイール9のステアリング操作に応じて転舵モータ29,30を駆動するSBW制御と、バックアップ装置2を連結状態にしてステアリングホイール9からのドライバの操舵力に補助操舵力を付加するように転舵モータ29,30を駆動するPS制御とを行う第1制御コントローラ4aとを備え、第1制御コントローラ4aは、前輪27,27の転舵角が所定の第1設定舵角Ydeg以上となったときには、SBW制御からPS制御に移行する。
(もっと読む)
201 - 219 / 219
[ Back to top ]