
Fターム[3D232DE02]の内容
走行状態に応じる操向制御 (73,124) | 制御出力パターン (1,729) | 漸増減 (378)
Fターム[3D232DE02]に分類される特許
201 - 220 / 378
車両用操舵装置
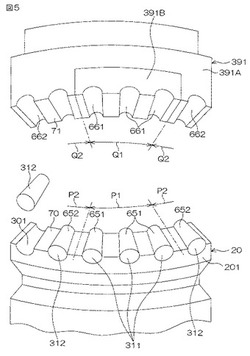
【課題】直進走行時に接触している箇所のフレッティング摩耗を抑制して耐久性を向上することができる車両用操舵装置を提供すること。
【解決手段】伝達比可変機構が、入力部材20および出力部材の間に介在し両部材の差動回転を許容する中間部材としての内輪391を備える。入力部材20および内輪391の第1の動力伝達面70,71は、操舵角が操舵中心を含む所定の角度範囲内にあるときに互いに嵌合する第1の領域P1,Q1と、第1の領域P1,Q1外の第2の領域P2,Q2とを含む。第1の領域P1,Q1にある第1の凸部651および第1の凹部661の硬さを相対的に硬くした。
(もっと読む)
操舵システム

【課題】旋回中の車両の駆動力抜けに伴って発生する違和感を軽減できる操舵システムを提供することを課題とする。
【解決手段】操舵制御ECU130は補正判定部70を備え、変速機11のギアチェンジを検出することで駆動力抜けを検出する。そして操舵制御ECU130は、車両の旋回中に駆動力抜けを検出した場合、ベース補正ゲインDGを演算してベース信号DTに積算してベース信号DTが小さくなるように補正するとともに、ダンパ補正ゲインIGを演算してダンパ補償値Iに積算してダンパ補償値Iが大きくなるように補正し、電動機が発生する補助トルクを小さくする。
(もっと読む)
電動パワーステアリング装置
【課題】電源、給電線のいずれに故障原因があるかを速やかに特定することができる電動パワーステアリング装置を提供する。
【解決手段】車載バッテリ(9)が接続されたモータ駆動部64によってモータ5を駆動し、モータ5の回転力によって操舵を補助するようにしてある電動パワーステアリング装置に、車載バッテリ(9)の出力電圧を検出する第1電圧検出手段と、モータ駆動部64への入力電圧を検出する第2電圧検出手段と、第1電圧検出手段及び第2電圧検出手段が検出した各電圧の差と閾値とを比較する故障判定部63とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】操舵補助制御の安定性を確保しつつ、良好な操舵感を実現することができる電動パワーステアリング装置を提供する。
【解決手段】操舵系に操舵補助力を付与する電動モータ12を備え、少なくとも操舵トルクTに基づいて基本操舵補助指令値Irを演算し、位相遅れ補償部22で基本操舵補助指令値Irに対して位相遅れ補償を行って操舵補助指令値Iraを演算し、ロバスト安定化補償部23で位相補償された操舵補助指令値Iraに対してロバスト安定化補償を行って操舵補助指令値Irbを演算する。そして、この操舵補助指令値Irbを各補償値で補償した操舵補助指令値Itに基づいて電動モータ12を駆動制御する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】電動パワーステアリング装置の制御装置において、温度環境の変化に起因する実質的なデッドタイムの変動を抑制し、トルクリップルの発生を抑止すること。
【解決手段】電流指令値を入力とする電流制御部48と、インバータ回路66の制御に必要なPWM信号を生成するPWM信号生成部56と、電流指令値に基づきPWM信号に設けられたデッドタイムによる影響を抑制するための補償電圧を生成して出力するデッドタイム補償部46と、電流制御部48からの電圧指令値とデッドタイム補償部46からの補償電圧とに基づいてPWM信号生成部56に付与する指令DUTYを決定する指令DUTY決定部50と、インバータ回路66に具備されるスイッチング素子の温度または周辺温度を検出した検出温度に基づきPWM信号生成部56に付与されているデッドタイム指定値を補正するデッドタイム補正部54と、を備える。
(もっと読む)
操舵アシスト力制御装置
【課題】操舵アシスト力を過度に制限することなくアシスト切れを防止する操舵アシスト力制御装置を提供すること。
【解決手段】モータ4が発生させる操舵アシスト力を制御する操舵アシスト力制御装置100は、モータ4に供給された電流値又は電圧値に基づいてモータ4が利用可能な電気エネルギーの瞬間的な余裕度を算出する瞬間余裕度算出手段11と、ステアリングハンドルで入力された操舵トルクとモータ4が利用可能な電気エネルギーの瞬間的な余裕度とに基づいてモータ4が発生させる操舵アシスト力を制御する操舵アシスト力制御手段10と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて、ステアリング戻し制御の停止及び復帰時においても良好な操舵フィーリングを維持することのできる電動パワーステアリング装置を提供すること。
【解決手段】マイコン21は、操舵角θsの異常を示す舵角異常信号S_stが「ON」となった場合には、そのステアリング戻し制御を停止する。また、マイコン21は、基本アシスト制御量Ias*を演算する前段階において、該演算の基礎となる検出された操舵トルクτを、その操舵状態(ステアリング操作の状態)に応じて補正する機能を有している(操舵トルクシフト制御)。そして、上記操舵角θsの異常が検知され、且つ操舵状態が「切り込み」であると判定した場合には、基本アシスト制御量Ias*が減少する方向に操舵トルクτを補正するような操舵トルクシフト制御を実行する。
(もっと読む)
電動パワーステアリング装置
【課題】タイヤのグリップが失われ始めることを運転者に感知させることができると共に、タイヤのグリップ限界に近づいたときに運転者の切増し操舵を抑制する。
【解決手段】電動モータ12の角速度に基づいて摩擦補償部36で摩擦補償値Ifを算出し、さらにタイヤのグリップが失われた度合を表すグリップロス度をグリップロス度検出手段23で検出し、検出したグリップロス度gに基づいて補償値補正手段24で摩擦補償値Ifを補正する。
(もっと読む)
電動パワーステアリング装置
【課題】タイヤのグリップが失われ始めることを運転者に感知させることができると共に、タイヤのグリップ限界に近づいたときに運転者の切増し操舵を抑制する。
【解決手段】グリップロス度検出部23で、セルフアライニングトルク検出値SATdとセルフアライニングトルク推定値SATpとに基づいて、タイヤのグリップが失われた度合を表すグリップロス度gを検出すると共に、アクティブリターン補償部40で、車速Vx、操舵角δ及び舵角速度ωhに基づいて操舵補助電流指令値Irefに対するアクティブリターン補償値HRを算出し、補償値補正部24で、グリップロス度gに基づいてアクティブリターン補償値HRを補正する。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて、ステアリング戻し制御の停止及び復帰時においても良好な操舵フィーリングを維持することのできる電動パワーステアリング装置を提供すること。
【解決手段】マイコン21は、操舵角θsの異常を示す舵角異常信号S_stが「ON」となった場合には、ステアリング戻し制御を停止するとともに、該停止に伴う戻し方向の制御成分の消滅に合わせて、その演算する基本アシスト制御量Ias*を低減する。また、マイコン21は、基本アシスト制御量Ias*を演算する前段階において、該演算の基礎となる検出された操舵トルクτを、その操舵状態(ステアリング操作の状態)に応じて補正する機能を有している(操舵トルクシフト制御)。そして、上記操舵角θsの異常が検知され、且つ操舵状態が「切り戻し」であると判定した場合には、基本アシスト制御量Ias*が更に低減される方向に操舵トルクτを補正するような操舵トルクシフト制御を実行する。
(もっと読む)
車両の操舵装置
【課題】 操舵ハンドルの回転速度が減速されて転舵輪に伝達されている場合においても操舵量の増加が抑制された車両の操舵装置を提供すること。
【解決手段】 ARS用ECU91は、アッパーシャフト211およびロアーシャフト212の配置関係が通常配置であるときに通常時後輪逆相制御モードにより後輪の逆相転舵を制御し、減速配置であるときに減速時後輪逆相制御モードにより後輪の逆相転舵を制御する。減速時後輪逆相制御モードにより後輪を制御する際における後輪の転舵角は、通常時後輪逆相制御モードにより後輪を制御する際における後輪の転舵角よりも大きい。このため、減速配置時には、操舵ハンドル10の操舵量をそれほど大きくしなくても後輪が大きく逆相に転舵することにより車両の回転が補助される。これにより減速配置時に操舵量の増加が抑制される。
(もっと読む)
電動パワーステアリング装置
【課題】車両のステア状態が、少なくともオーバーステアであるときに、操舵の切増し抑制すると共に、カウンターステア操舵を容易にし、車両挙動の安定性を向上させる。
【解決手段】タイヤのグリップが失われた度合を表すグリップロス度をグリップロス度検出手段23で検出すると共に、車両のステア状態をステア状態検出部24で検出し、車両のヨーレートをヨーレート検出手段42で検出し、さらに電動モータ12のモータ角速度を角速度演算部で検出し、検出したヨーレート、モータ角速度、ステア状態及びグリップロス度に基づいて補償値補正手段25で操舵補助電流指令値に対するトルク微分補償値を補正する。
(もっと読む)
電動パワーステアリング装置
【課題】タイヤのグリップが失われ始めることを運転者に感知させることができると共に、タイヤのグリップ限界に近づいたときに運転者の切増し操舵を抑制する。
【解決手段】路面側から伝達されるセルフアライニングトルクをSAT検出手段35で検出すると共に、検出したセルフアライニングトルク検出値SATdに基づいて操舵補助電流指令値に対するセルフアライニングトルク補償値SATcを算出し、さらにタイヤのグリップが失われた度合を表すグリップロス度をグリップロス度検出手段23で検出し、検出したグリップロス度gに基づいて補償値補正手段24でセルフアライニングトルク補償値SATcを補正する。
(もっと読む)
車両の制御装置
【課題】路面入力に対し車両の挙動を安定させる。
【解決手段】前輪及び後輪の実舵角を夫々独立して制御することが可能な車両10において、前輪のサスストローク量(ロール角換算)と、ドライバの意思に基づいた操舵入力に起因するサスストローク量(ロール角換算)とに基づいて、真の路面入力としての前輪ロールストローク量θf−θが算出される。一方、この前輪ロールストローク量θf−θに基づいて、前後輪に作用する横力が算出され、この横力を抑制すべく算出される補正舵角に基づいて前後輪の実舵角が制御される。一方、この前輪ロールストローク量θf−θから、車体ロール角θが算出され、この車体ロール角θに基づいて、ドライバの意思に沿わない操舵入力としてのロール操舵角δrlが算出される。操舵制御に際しては、このロール操舵角に相当する操舵角の補正がなされ、不要な横力の発生が抑制される。
(もっと読む)
車両挙動制御装置
【課題】複数の車両運動制御装置を用いて運動を協調制御させるに際し、各車輪のタイヤの荷重状態に応じて適切に所望の運動を実現させるタイヤ発生力を算出して無駄なエネルギ消費を抑える。
【解決手段】車輪3のタイヤ横力Fyおよびタイヤ前後力Fxを個別に可変制御することによって車両の挙動を制御する車両挙動制御装置10において、車輪のタイヤ横力とタイヤ前後力との制御割合を設定する制御割合設定部30と、運転者による運転操作量から目標ヨーレイトγTを算出する目標ヨーレイト算出部27と、車輪の実舵角から規範ヨーレイトγT0を算出する規範ヨーレイト算出部29とを備え、制御割合設定部30は、目標ヨーレイト算出部によって算出された目標ヨーレイトと規範ヨーレイト算出部によって算出された規範ヨーレイトとの差Δγが小さいほど、タイヤ前後力の制御割合を小さくするように構成する。
(もっと読む)
電動パワーステアリング装置の制御装置及び制御方法
【課題】パワー素子を過熱保護する際に、電動パワーステアリング装置の正常動作範囲を広げることを可能にする。
【解決手段】ECU1のモータ駆動回路13において、モータ2を駆動するパワーMOSFET131〜136のオン時における電流を検出する電流モニタ14と、パワーMOSFETのオン時におけるドレイン・ソース間電圧を検出する電圧モニタ15と、パワーMOSFET近傍の温度を検出する温度センサ16を備える。電流モニタ14及び電圧モニタ15でそれぞれ検出した電流と電圧から、パワーMOSFETのオン抵抗を算出し、オン時における電流とオン抵抗から電力損失を求めてパワーMOSFETの発熱量(温度上昇)を推定する。この発熱量に、温度センサ16で検出した温度を加算することにより、パワーMOSFETの実温度を求め、実温度が所定の閾値を超えないように、CPU11でモータ電流を変更制御する。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの中立位置への復元性の低下を解消する。
【解決手段】セルフアライニングトルク推定部51で推定したセルフアライニングトルクSATを操舵角δ相当値とし、操舵角δが大きいときほど、反力がステアリングホイールに伝達される伝達効率が低下するとして、セルフアライニングトルクSATが大きいときほど小さな値となる伝達効率を推定し、伝達効率が小さいときほど、大きな値となるゲインGを設定する。このゲインGをセルフアライニングトルクSATに乗算し、セルフアラニングトルクSATを伝達効率の低下分相当だけ増幅した値を、復元トルクIrtとして、操舵補助トルク指令値Im*にフィードバックする。操舵トルクTに応じた操舵補助トルクだけでなく、復元トルクIrt相当の操舵補助トルクも発生されることから、中立位置への復元性を向上させることができる。
(もっと読む)
電動パワーステアリング装置
【課題】補助電源を使用する電動パワーステアリング装置において、補助電源を使用するか否かの制御のハンチングを防止する。
【解決手段】バッテリ9を含む主電源のみによってモータ4へ電力を供給する第1の出力状態と、主電源及び補助電源14からモータ4へ電力を供給する第2の出力状態とを選択的に構成する充放電回路16、及び、操舵補助に必要な電力に応じて充放電回路16の出力状態を選択する制御回路6を備えた電動パワーステアリング装置において、制御回路6は、第1の出力状態において操舵補助に必要な電力が上り閾値P1以上になったときは第2の出力状態を選択し、第2の出力状態において操舵補助に必要な電力が上り閾値P1より低い値の下り閾値P2以下になったときは第1の出力状態を選択することにより、出力状態の変化にヒステリシスを設ける。
(もっと読む)
パワーステアリング装置
【課題】 手放し状態におけるハンチングを回避して違和感を低減したパワーステアリング装置を提供する。
【解決手段】 ステアリングホイールに連結された操舵機構と、操舵機構と転舵輪とを接続する伝達機構と、操舵機構へ入力されるトルクに基づき伝達機構を駆動することにより、転舵輪に対しアシスト力を付与する電動機と、転舵輪に与える操舵アシスト力に応じて、電動機に駆動信号を出力する電動機制御手段と、電動機制御手段からの駆動信号によって電動機を回転させようとする方向と、電動機の実際の回転方向とが不一致のとき、電動機逆回転状態と判定する電動機逆回転判定手段と、電動機逆回転判定手段が電動機逆回転状態と判定するとき、電動機に発生するトルクを減衰させるダンピングトルク付与手段とを有することとした。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングの操作をアシストするモータの駆動電流の向き(極性)をモータの駆動アームの向きから決定する簡単かつ安価で実用的な駆動電流検出により、前記駆動電流をフィードバック制御してアシストトルクを発生する電動パワーステアリング装置において、前記駆動電圧の向きが切り替わるときの前記駆動電流の向きの検出誤りに起因する誤ったフィードバック制御を防止し、不快なトルク変動の発生を防止する。
【解決手段】フードバック制御によりモータ1の駆動電圧の向きを切り替える駆動電圧の操作が発生したときに、電圧出力器7Bにより前記駆動電圧量によって駆動電流の向きが逆転するか否かを予測し、この予測の結果に基づき、電圧出力器7Bによりモータ駆動回路9を制御して前記駆動電流の向きを制御し、駆動電流の向きの検出の誤りに起因する誤ったフィードバック制御を防止する。
(もっと読む)
201 - 220 / 378
[ Back to top ]