
Fターム[3D232DE02]の内容
走行状態に応じる操向制御 (73,124) | 制御出力パターン (1,729) | 漸増減 (378)
Fターム[3D232DE02]に分類される特許
161 - 180 / 378
ロール角推定装置、及び電動パワーステアリング装置
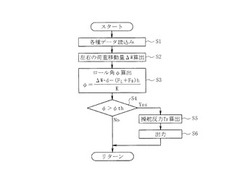
【課題】一般乗用車に装備されやすいセンサを利用し、車体のロール角φを高精度に推定する。
【解決手段】例えばマルチ荷重センサ12により、左右輪に作用する垂直荷重WL及びWR、並びに横力FL及びFRを検出する。そして、左右輪に作用する垂直荷重WL及びWRに応じて、左右輪の荷重移動量ΔWを算出し、この荷重移動量ΔW、並びに横力FL及びFRに応じて、車体のロール角φを推定する。より正確に車体のロール角φを推定したければ、横力における、車輪進行方向に対する直角方向成分、つまりコーナリングフォースFcFL〜FcRRを用いる。
(もっと読む)
車両制御装置

【課題】過大な引き込み電流の発生を抑えつつクランキング時においても電動パワーステアリング装置によるアシスト力付与を継続し、且つその良好な操舵フィーリングを維持することのできる車両制御装置を提供すること。
【解決手段】エンジンECUは、エンジンの始動(再始動)を決定した場合には、当該エンジン始動すべくクランキングを実行するに際して、EPSECUに対し、事前にその旨を通知する。そして、EPSECUは、該通知があった場合には、そのクランキングが開始される前に、電流指令制限値I*_lim及び昇圧電圧制限値Vbp_limを漸次低減する。
(もっと読む)
車体流れ抑制装置
【課題】運転者が違和感を感じることがない車体流れ抑制装置を提供する。
【解決手段】車体流れ抑制装置1は、アクチュエータ部31と、このアクチュエータ部31を車体流れを抑制すべく制御する車体流れ抑制制御部32と、操舵トルクを検出する操舵トルクセンサ4と、を備える。車体流れ抑制制御部32は、車体流れを抑制する車体流れ抑制制御量を制限する制限手段として操舵トルク微分演算部14と、制御量上限値算出部15と、車体流れ抑制制御量設定部16と、徐々処理部18と、を備え、この制限手段は、操舵トルクセンサ4により検出された操舵トルクの方向と操舵トルクの微分の方向とが同じ方向である場合と、操舵トルクの方向と操舵トルクの微分の方向とが異なる方向である場合とで、車体流れ抑制制御量の制限量を異ならせる。
(もっと読む)
車線逸脱防止装置
【課題】運転者による保舵状態を短時間で適切に判定できる車線逸脱防止装置を提供する。
【解決手段】車線逸脱防止装置を、自車両の走行車線を設定する車線設定手段110と、運転者の操舵操作による操舵角を検出する操舵角検出手段150と、運転者の操舵操作による入力トルクを検出するトルク検出手段140と、走行車線からの自車両の逸脱傾向を判定する逸脱判定手段130と、逸脱判定手段が逸脱傾向を判定した場合に、逸脱を防止する方向へ操舵機構10にパルス状の操舵トルクを付与する操舵制御手段170と、パルス状の操舵トルクを付与した際の操舵角の変位量が所定の閾値以上であり又は入力トルクが所定の閾値以下の場合に運転者による保舵状態低下を判定する保舵状態検出手段160とを備える構成とする。
(もっと読む)
車両用協調制御システム
【課題】 既存の制御装置に対して大幅な変更を加えることなく、しかも互いに干渉することなく、協調して作動させることのできる車両用協調制御システムを提供する。
【解決手段】 各車両制御装置の出力段に、対応する車両制御装置からの制御信号及び集中制御装置からの制御信号のいずれかを選択して、対応する車両制御装置のアクチュエータに供給するための選択手段を設ける。通常は、車両制御装置に代えて、集中制御装置が協調的に各部の制御を行うが、集中制御装置の失陥に際しては、個々の車両制御装置により各部の制御を行う。
(もっと読む)
車両の運動制御装置、及び車両の運動制御方法
【課題】車両旋回時に運転手に対して違和感を与えることなく、車両旋回時のアンダーステア状態を速やかに解消させることができる車両の運動制御装置、及び車両の運動制御方法を提供する。
【解決手段】車両の旋回時にアンダーステア状態になると、グリップ力回復制御が実行される。すなわち、転舵輪である前輪の転舵角σは、その絶対値が一時的に小さくなるように調整される。また、前輪に対する駆動力Dは、グリップ力回復制御の実行によって転舵角σが最小転舵角σminになった時点では、前輪の回転状態に応じて増加又は減少されている(第1経過時間t1)。その後、前輪の転舵角σは、最小転舵角σminから元の角度に向かう方向に再び調整される(第2経過時間t2)。また、前輪に対する駆動力Dは、グリップ力回復制御の実行直前の駆動力Dとなるように再び調整される(第3経過時間t3)。
(もっと読む)
車体流れ抑制装置
【課題】運転者が違和感を感じることがない車体流れ抑制装置を提供する。
【解決手段】車体流れ抑制装置1は操舵トルクを検出する操舵トルクセンサ4を備え、操舵トルクセンサ4により検出された操舵トルクが所定値以上の状態が所定時間以上継続した場合に、車体流れを抑制する車体流れ抑制制御量を増加させ、操舵トルクセンサ4により検出された操舵トルクが所定値以下の状態が所定時間以上継続した場合に、前記車体流れ抑制制御量を減少させる。
(もっと読む)
車両制御装置
【課題】路面の摩擦係数に応じて、タイヤのグリップ力が最大限利用できるスリップ角及びキャンバ角の制御を行うことができ、車両の挙動変化率を小さくする。
【解決手段】車両制御装置1には、車両が走行している路面の路面μを推定するμ推定部11と、この路面μを用いてスリップ角SA及びキャンバ角CAを制御するタイヤ姿勢制御部12とを有するECU10が設けられている。タイヤ姿勢制御部12は、μ推定部11で推定された路面μに基づいて、目標スリップ角SAt及び目標キャンバ角CAtを算出し、この目標スリップ角SAt及び目標キャンバ角CAtに基づいて、目標セルフアライニングトルクSATtを算出する。そして、タイヤ姿勢制御部12は、目標キャンバ角CAtに基づいてキャンバ角CAを制御し、目標セルフアライニングトルクSATtに基づいてスリップ角SA及びキャンバ角CAを制御する。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールを中立位置に戻す方向に作用する戻し力成分を付加する操舵力制御において、運転者の操舵フィーリングを向上させるとともに、操作負荷を低減する。
【解決手段】補助操舵力を発生するモータ9と、当該モータを所定の目標電流をもって駆動する駆動回路22とを備えた電動パワーステアリング装置1において、少なくとも操舵トルクに基づき目標電流の元になるベース電流を設定するベース電流算出部31と、ベース電流に対し、ステアリングホイールを中立位置に戻す方向に作用する戻し力成分の補正量(戻し力電流)を設定する戻し力電流算出部34とを備え、戻し力電流算出部は、操舵トルク方向とステアリングホイールの回転方向とが一致する場合、操舵トルク方向とステアリングホイールの回転方向とが一致しない場合よりも補正量を小さく設定することで、戻し力を低減する。
(もっと読む)
油圧パワーステアリング
【課題】スネーキング現象の振動モードに陥ることを抑制する油圧パワーステアリングを提供する。
【解決手段】2つのシリンダ室23b、23cを有し、車両の前輪を操舵するハンドルの操舵力を補助する油圧シリンダ23と、2つシリンダ室23b、23cへのオイルの供給、排出を制御するロータリバルブ27とを有し、シリンダ室23bとロータリバルブ27との間を接続する配管Lに、通過するオイルの流量を制限可能な流量可変バルブ24を設け、車両が被牽引車を牽引しているときには、流量可変バルブ24を通過するオイルの流量を調整し、油圧シリンダ23の動きを抑制している。
(もっと読む)
車輌用操舵装置
【課題】運転者により操舵部材が保舵状態とされた場合に、保舵状態に適した操舵補助力を応答性よく発生することができる車輌用操舵装置を提供する。
【解決手段】制御部30は、転舵角センサ6が検出する転舵角及び車速センサ32が検出する車速から推定される車輌の横すべり角と視線角検出手段31が検出する運転者の視線角との角度差に基づいて、操舵補助力を調整する。横すべり角及び視線角の角度差が小さい場合、即ち保舵状態又は保舵状態に近い状態においては、モータ4が発生する操舵補助力を増加させるように制御部30が操舵補助力の調整を行う。ステアリングホイール1の操舵角が中立位置を含む所定範囲内の場合には、制御部30は操舵補助力の調整を行わない。運転者の視線角が変化した時の変化量又は変化の加速度が所定量を超えた場合には、この変化に基づく操舵補助力の調整を行わずに、変化前の操舵補助力の調整結果を維持して行う。
(もっと読む)
電動パワーステアリング装置
【課題】保舵状態から手放し状態への移行時における操舵速度フィードバック制御のオーバーシュートを抑えて、その追従性の向上を図ることのできる電動パワーステアリング装置を提供すること。
【解決手段】ステアリング戻し制御部28は、操舵速度目標値ωs*に実際の操舵速度ωsを追従させるべく操舵速度フィードバック制御を実行することにより、ステアリングを中立位置に復帰させるための補償成分としてステアリング戻し制御量Isb*を演算する。また、ステアリング戻し制御部28は、そのステアリング操作の状態を判定する機能を有する。そして、当該ステアリング操作の状態が上記保舵状態から手放し状態への移行時であると判定される場合には、その出力するステアリング戻し制御量Isb*を低減する。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて、長時間に亘る直線走行時においても効果的なアシスト力付与を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部25は、操舵トルク積算制御演算部28を備え、同操舵トルク積算制御演算部28は、操舵トルクτの積算に基づきアシスト力を増大させる補償成分として操舵トルク積算制御量Iint*を演算する。また、この操舵トルク積算制御演算部28は、直進走行時であるか否かを判定する判定手段としての機能を有し、直線走行時であると判定される場合に、上記操舵トルク積算制御量Iint*を加算器29に出力する。そして、電流指令値演算部25は、基本アシスト制御部27により演算された基本アシスト制御量Ias*に当該操舵トルク積算制御量Iint*を重畳した値を、目標アシスト力に対応した電流指令値Iq*としてモータ制御信号出力部26に出力する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、当該二相駆動時には、検出される回転角速度ωに応じて、そのサンプリング周期を短縮化する。
(もっと読む)
パワーステアリング装置
【課題】省エネルギーを達成できる上に、操舵者にひっかかり感を与える可能性がなくて、スムーズにフィリング良く操舵を行うことができるパワーステアリング装置を提供すること。
【解決手段】コントロールバルブ15は、中立位置S0で、ポンプポートPを第1負荷ポートAおよび第2負荷ポートBに連通させる一方、タンクポートTを閉鎖する。したがって、操舵輪1の切り返し時、パワーシリンダ6の第1室CAまたは第2室CBが瞬間的にタンク32に連通することがなくて、パワーシリンダ6がスムーズに作動して、操舵者にいわゆるひっかかり感を与えることがない。圧力指令が、流動損失に関連する圧力補償値で補正されているから、寒冷時に操舵が重くなる恐れがない。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】温度検出手段から一定値の検出信号が出力される場合でも、温度検出手段の故障を検出することができ、そして操舵アシスト及び過熱保護を適切に継続実施することができる。
【解決手段】サーミスタSR1及び温度検出回路ブロック14等によりフィードバックされるモータ駆動回路部13の温度値と、FET駆動回路部12が通常備える異常検出回路121におけるMOSFETのドレイン電圧を検出し、この検出されたドレイン電圧から推定されたECU1の内部温度との相関係数を算出する。そして、この算出された相関係数が所定の閾値より小さくなったときに、サーミスタSR1と温度検出回路ブロック14等の温度検出手段と、異常検出回路121等の温度検出手段と、のいずれかが故障したと判定する。
(もっと読む)
パワーステアリング装置
【課題】省エネルギーを達成することができる上に、冬場などの気温の低いときでも、パワーシリンダのアシスト力が小さくなることがなくて、操舵者の操舵力が増加することがなくて、操舵感がよいパワーステアリング装置を提供すること。
【解決手段】制御装置50は、油温センサ41から受けた作動油の温度を表す信号に基づいて、作動油の温度の低下に応じて大きくなる圧力補償値を作成する。この圧力補償値は、作動油の粘度に起因する流動圧力損失に対応する値である。パワーシリンダ6の第1室CAの圧力CAPと、第2室CBの圧力CBPとの差圧の絶対値ABS(CAP−CBP)と、圧力補償値とを加算して、圧力指令を作成する。このように、粘度の増大に起因する流動圧力損失を圧力補償値で補償して、圧力指令を作成するので、寒冷時などに、操舵感が重くなることがない。
(もっと読む)
パワーステアリング装置
【課題】省エネルギーを達成することができる上に、冬場などの気温の低いときでも、パワーシリンダのアシスト力が小さくなることがなくて、操舵者の操舵力が増加することがなくて、操舵感がよいパワーステアリング装置を提供すること。
【解決手段】制御装置50は、油温センサ41から受けた作動油の温度を表す信号に基づいて、作動油の温度の低下に応じて大きくなる圧力補償値を作成する。この圧力補償値は、作動油の粘度に起因する流動圧力損失に対応する値である。パワーシリンダ6の第1室CAの圧力CAPと、第2室CBの圧力CBPとの差圧の絶対値ABS(CAP−CBP)と、圧力補償値とを加算して、圧力指令を作成する。このように、粘度の増大に起因する流動圧力損失を圧力補償値で補償して、圧力指令を作成するので、寒冷時などに、操舵感が重くなることがない。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】各回転位置(各回転角)において高精度に誤差補正が可能な電動パワーステアリング装置の制御装置を提供すること。
【解決手段】モータの発生トルクが小さい状況にてモータ1への通電を停止して(S104)、モータ1の誘起電圧Eu、Ev、Ewを求め(S106)、この誘起電圧Eu、Ev、Ewから回転位置の推定値θxを求め(S118)、この回転位置の推定値θxとレゾルバ4が測定した回転位置の測定値θdとの関係を示すマップを更新する(S110)。このマップを用いて、レゾルバ4が出力する回転位置の測定値θdを補正する。これにより、回転角誤差に起因する電動パワーステアリング装置の振動や騒音を良好に低減することができる。
(もっと読む)
車両挙動制御装置
【課題】パワープラントの一部として構成される回転体の軸の方向を偏向させることで、車両挙動を適切に制御する。
【解決手段】車両挙動制御装置は、車両に搭載されるパワープラントの一部として構成される回転体と、目標の車両挙動を得るための車両挙動目標値を設定して、当該車両挙動目標値に応じて、車体に対する回転体の回転軸の方向を偏向させる軸偏向手段と、を備える。これにより、エンジンやモータなどの既存の車両構成部品を回転体として利用して、当該回転体の回転軸の方向を偏向させることで発生するジャイロモーメントを用いて、車両挙動を適切に制御することができる。
(もっと読む)
161 - 180 / 378
[ Back to top ]