
Fターム[3D232EC40]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御機構) (6,276) | その他 (249)
Fターム[3D232EC40]に分類される特許
1 - 20 / 249
車両用操舵装置
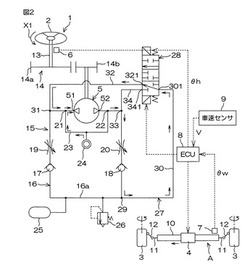
【課題】簡単な構造で安価に操舵反力を発生できる車両用操舵装置を提供すること。
【解決手段】例えば左操舵される操舵部材2によって伝達機構14を介して第1回転方向X1に駆動された空気圧縮機5が、第1ポート51を吸込口とし、第2ポート52を吐出口とする。空気供給口24からの空気が、吸込口となっている第1ポート51に供給される。吐出口になっている第2ポート52から吐出された圧縮空気は、第2可変絞り20、第2逆止弁18、高圧部16aの分岐部29、上流側還流路30、方向制御弁28および第1下流側還流路32を介して、吸込口となっている第1ポート51に還流される。操舵部材2に、空気圧縮機5の駆動の反力による操舵反力が付与される。
(もっと読む)
インホイールシステムを用いた車両制御方法

【課題】 車両の旋回安定性を確保しながらも、回転半径を最小化させることのできるインホイールシステムを用いた車両制御方法を提供する。
【解決手段】車両の各ホイールの内部にモータを装着して制御するインホイールシステムを用いた車両制御方法において、車両走行情報を基に車両の旋回モードを判断するステップと、旋回モードに対する車両の現在のアッカーマン率を計算するステップと、現在のアッカーマン率を基に制御命令を生成するステップと、制御命令を用いて各ホイールのモータをそれぞれ制御するステップと、を含むことを特徴とする。
(もっと読む)
操舵補助制御装置
【課題】操舵補助制御実行中における運転者の適正な関わりを検出するとともに、運転者の操舵補助制御に対する監視放棄を抑制することのできる操舵補助制御装置を提供すること。
【解決手段】操舵補助制御中の第1所定時間経過後に(S1)、アシストトルクを通常の操舵補助制御に基づく目標アシストトルクから運転監視確認用アシストトルクに調整し(S2〜S4)、所定期間内に運転者の反応が検出されなかった場合には(S5、S7)、運転者への警告を発するとともに操舵補助制御を停止する(S8)。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置において、モータに電流を流す通電路に設けた開閉リレーが溶着等により閉故障した場合、安全に操舵アシストを継続して、運転者の感じる不便を軽減する。
【解決手段】リレー故障検出部61により開閉リレー48の閉故障が検出されると、制御態様変更部80は、目標電流演算部71、電流指令値演算部72、PWM制御部73に対して、回路故障抑制操舵アシスト制御の実行を指令する。回路故障抑制操舵アシスト制御時においては、モータ駆動回路40の故障が抑制されるように、モータ20の上限電流Imax、あるいは、上限電圧Vmax、あるいは、上限電力Pmax、あるいは、目標電流I*、あるいは、電圧指令値V*が低減される。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】トー角調整時に転舵軸の非回転分割軸と回転分割軸とが互いに抜けることが防げ、トー角調整用モータの消費電力量を抑えることができるステアバイワイヤ式操舵装置を提供する。
【解決手段】非回転分割軸10Aと回転分割軸10Bとがねじ結合部で互いに結合された転舵軸10を備える。両分割軸10A,10Bを一体に軸方向移動させることにより、転舵輪を転舵させる。非回転分割軸10Aに対して回転分割軸10Bを回転させて、ねじ結合部の螺合長さを調整することにより、転舵輪のトー角を変える。一方の分割軸10Aに、径方向に広がるつば部90b,90cを有する被係合部材90を設ける。他方の分割軸10Bに、ねじ結合部の螺合長さが一定長さ以下になった場合に、つば部90cに係合して螺合長さが短くなる側への両分割軸10A,10Bの相対軸方向移動を規制する係合部材91を設ける。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
車両用転舵装置
【課題】転舵軸の左右のストロークが規制され、ステアリングシャフトから転舵軸に至る機能部品に過荷重が作用した場合に、かかる状況を運転者に知らせること
【解決手段】転舵機構SM1に、ラックバー60の軸方向に摺動可能な摺動リング部材80を有するストローク可変機構SV1を設ける。摺動リング部材80は、ラックエンド61に対する摺動を許容可能に組付けられる。ストローク可変機構SV1は、ラックバー60(摺動リング部材80)に所定値未満の軸方向荷重が作用するとき摺動リング部材80の摺動を規制してラックバー60の左右の最大ストローク量を初期値(S2)に維持する。一方、ストローク可変機構SV1は、ラックバー60(摺動リング部材80)に所定値以上の軸方向荷重が作用するとき摺動リング部材80の摺動を許容してラックバー60の左右の少なくとも一方の最大ストローク量を初期値(S2)から変更(S1+S2に増加)させる。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】車両オペレータの操作体による単純な小旋回用ブレーキ操作によって左右いずれか一方の車輪ブレーキを自動的に選択しつつ、制動力は車両オペレータの手動感覚で任意に調整できるアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】メインブレーキマスタシリンダ51とは別に設置した小旋回ブレーキマスタシリンダ56からハンドブレーキレバー58の操作量に応じて発生し左右の車輪ブレーキ37,38または39,40に制動力として作用する制動圧の供給を、旋回内側に対応する左小旋回制御弁62または右小旋回制御弁64のいずれか一方により制御する。左小旋回制御弁62または右小旋回制御弁64のいずれか一方は、アーティキュレート角センサからの信号によりコントローラが自動的に選択して弁開状態に制御する。車両オペレータは、制動力を実感しながら車体の安定性を保持できるように微妙な調整を行なうことができる。
(もっと読む)
電動パワーステアリング装置を有する車両
【課題】 山岳路等の下り坂を走行している場合には、電動モータ20の発熱を抑制して十分な操舵アシストが得られるようにする。
【解決手段】 燃料タンク50を、第1燃料室51と、第1燃料室51より車両後方側となる第2燃料室52と、第1燃料室51と第2燃料室52とを連通する連通室53とにより構成する。第1燃料室1には、加圧板61が設けられ、下り坂走行中に操舵操作が確認されたときには、ECU30から加圧ユニット60に作動指令が出力され、加圧板61が作動して、加圧板61を下方に押し込む。これにより燃料タンク内の燃料fが車両後方側に移動し、前輪FW側の車両重量配分が低下し、電動モータ20の負荷が軽くなる。
(もっと読む)
アウターミラー装置
【課題】車両の向きと進行方向にずれが生じた場合でも進行方向に撮像範囲を補正することができるアウターミラー装置を提供する。
【解決手段】撮像範囲補正装置1は、主に、車両2の周囲を撮像する左撮像部10、及び右撮像部11と、車両2の操舵角δに基づいて、左撮像部10の撮像範囲210、及び右撮像部11の撮像範囲220を補正する補正情報を生成する補正情報生成部18と、補正情報生成部18から入力した補正情報に基づいて左及び右撮像部10、11を駆動して撮像範囲210、220を補正する駆動部12と、補正された撮像範囲210を撮像した左撮像部10から出力された左画像情報、及び補正された撮像範囲220を撮像した右撮像部11から出力された右画像情報に含まれる対象物3と車両2との距離を算出する距離算出部17と、を備えて概略構成される。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 車輪を転舵する転舵モータが失陥しても、トー角調整用モータを転舵の駆動源に転用して転舵を行うことができるステアバイワイヤ式操舵装置を提供する。
【解決手段】 転舵用の操舵軸10と機械的に連結されないステアリングホイールと、操舵角センサと、操舵反力モータと、転舵モータおよび操舵反力モータを制御するステアリング制御部とを備える。転舵モータ6から操舵軸10に動力を伝達して転舵を行なわせる転舵動力伝達機構18のほか、トー角調整用モータ7から操舵軸10に動力を伝達してトー角調整を行なわせるトー角調整動力伝達機構28を設ける。転舵モータ6が失陥したとき、転舵モータ6の転舵動力伝達機構18からの切り離し、トー角調整動力伝達機構28の固定、トー角調整用モータ7による転舵を行なわせる切換手段17を、転舵動力伝達機構18およびトー角調整動力伝達機構28の途中部分に設ける。
(もっと読む)
運転支援システム
【課題】運転者が煩わしさを感じることがなく、しかも、簡単な制御で走行車線内での車両の走行を維持する。
【解決手段】運転集中状態にない時に車両1に横ずれが生じた場合、車両1のずれ量に応じてアクチュエータ15が動作されて車両1が走行レーンの内側に傾斜され、走行レーンの内側に移動する力を車両1に発生させ、車両1を走行レーンの内側に移動させる。
(もっと読む)
運転支援システム
【課題】 運転者が煩わしさを感じることがなく、しかも、簡単な制御で走行車線内での車両の走行を維持する。
【解決手段】 車両1のずれ量に応じてアクチュエータ15が動作されて車両1が走行レーンの外側に傾斜され、運転者に対する走行レーンの視覚を、ずれ方向と逆方向に傾けて認識させ、車両のずれを修正する状態に運転者に操舵を促す。
(もっと読む)
車両用警報装置
【課題】車両の乗員の注意喚起を的確におこないつつ、適切な車両挙動を維持する。
【解決手段】車両用警報装置10は、舵角制御装置23により転舵角が制御されている状態で覚醒状態判定装置63により乗員が非覚醒状態であると判定された場合に、舵角制御装置23による転舵角の制御を継続しつつ、反力制御装置24により転舵角とは独立してステアリングホイール11を往復動させる動作を警報動作として実行させる警報制御装置61を備え、警報制御装置61は、反力制御装置24によるステアリングホイール11の往復動に抗する乗員の操作入力が発生した場合に、反力制御装置24の動作を警報動作から通常動作に復帰させる。
(もっと読む)
車両用操舵装置
【課題】操舵時に衝突してエアバッグが作動した場合にも、腕部が運転者の胸部等に干渉するのを防止できるようにした車両用操舵装置を提供する。
【解決手段】ステアリングホイール12の転舵状態で車両の衝突状態を検出した場合に、メインエアバッグ4の展開に先行して操作部12Hを握った運転者の手部Dhを把持して拘束するサブエアバッグ9と、メインエアバッグ4の展開に先行してステアリングホイール12を直進走行状態に戻すステアリングホイール回動手段と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】 アイドリングストップ機能によりエンジンが自動停止あるいは自動再始動しているときでも、充分な操舵アシストが得られるようにする。
【解決手段】 主電源100からモータ駆動回路31への電源供給路107に、スイッチ111を介して副電源50を接続する。電源制御部32bは、アイドリングストップECU201がアイドリングストップ制御を実行しているとき(エンジンの自動停止中および自動再始動中)、スイッチ111をオン状態にして副電源50により主電源100の電源供給を補助する。また、アイドリングストップ制御中であっても、操舵ハンドル11が回動操作されていないときには、スイッチ111をオフ状態に維持する。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 車輪を転舵する転舵モータが失陥しても、トー角調整用モータを転舵の駆動源に転用して転舵を行うことができるステアバイワイヤ式操舵装置を提供する。
【解決手段】 転舵用の操舵軸10と機械的に連結されていないステアリングホイール1と、ステアリングホイール1の操舵角を検出する操舵角センサ2と、ステアリングホイール1に反力トルクを付与する操舵反力モータ4と、操舵軸10を駆動する転舵モータ6および操舵反力モータ4を制御するステアリング制御部5aとを備える。転舵モータ6とは別に、トー角を調整するトー角調整用モータ7を有するトー角調整機構16を設ける。転舵モータ6が失陥したとき、転舵モータ6を操舵軸10から切り離しトー角調整用モータ7で転舵を行なわせる切換手段17を設ける。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 車輪を転舵する転舵モータが失陥しても、トー角調整用モータを転舵の駆動源に転用して転舵を行うことができるステアバイワイヤ式操舵装置を提供する。
【解決手段】 転舵用の操舵軸10と機械的に連結されていないステアリングホイール1と、ステアリングホイール1の操舵角を検出する操舵角センサ2と、ステアリングホイール1に反力トルクを付与する操舵反力モータ4と、操舵軸10を駆動する転舵モータ6および操舵反力モータ4を制御するステアリング制御部5aとを備える。転舵モータ6とは別に、トー角を調整するトー角調整用モータ7を有するトー角調整機構16を設ける。転舵モータ6が失陥したとき、転舵モータ6の回転軸6aを固定しトー角調整用モータ7で転舵を行なわせる切換手段17を設ける。
(もっと読む)
車両の電源装置
【課題】 昇圧回路の過熱防止を図るときに副電源を有効に使って電気アクチュエータに安定した電力を供給する。
【解決手段】 昇圧回路40の回路温度Thが基準温度T1を上回っているとき、副電源の副電源電圧v2が判定電圧v2refよりも高ければ昇圧回路の作動を停止する。これにより、昇圧回路の過熱防止と、電動モータへの安定した電力供給とを両立することができる。一方、回路温度Thが基準温度T1を上回っていても、副電源の副電源電圧v2が判定電圧v2ref以下となる場合には、昇圧回路の昇圧動作を継続させる。この場合、副電源電圧v2に応じて昇圧目標電圧v1*を切り替えることにより、昇圧回路の過熱防止と電動モータへの電源供給とをバランス良く行うことができる。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 操舵反力モータおよび転舵モータにおいて生じる回生電力の蓄電を効率的に行うことができるステアバイワイヤ式操舵装置を提供する。
【解決手段】 転舵用の操舵軸10と機械的に連結されていないステアリングホイール1と、このステアリングホイール1の操舵角を検出する操舵角センサ2と、前記ステアリングホイール1に反力トルクを付与する操舵反力モータ4と、この操舵反力モータ4と前記操舵軸10を駆動する転舵モータ6とを制御するステアリング制御部5とを備える。ステアリング制御部5は、操舵角センサ2の検出する操舵角の信号を含む運転状態検出信号に基づいて、転舵モータ6を制御する。操舵反力モータ4および転舵モータ6において生じる回生電力を蓄電する蓄電手段14を設ける。
(もっと読む)
1 - 20 / 249
[ Back to top ]