
Fターム[3D244AC21]の内容
定速走行制御 (7,912) | 入力信号 (2,923) | 車両の状態に関するもの (1,907) | 変速装置 (106)
Fターム[3D244AC21]の下位に属するFターム
変速比、変速位置 (85)
Fターム[3D244AC21]に分類される特許
1 - 20 / 21
車両用走行制御装置
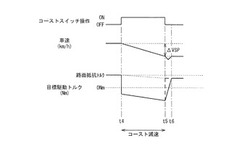
【課題】クルーズ走行等の自動定速走行において、運転者に与える違和感を抑制可能とするとともに、ドライバビリティの向上が可能となる。
【解決手段】運転者が設定した走行状態に自動調整するための目標駆動力を算出する処理を行なっている状態で、目標駆動力に応じた目標駆動トルクが運転者による目標駆動力の減少要求で路面抵抗トルク未満に減少すると、減少した目標駆動トルクが増加へ反転する反転タイミングから増加した目標駆動トルクが路面抵抗トルクとなるまでの目標駆動トルクの増加度合いを変化させ、反転タイミングが運転者による減少要求の停止操作と連動している場合には、反転タイミングが運転者による減少要求の停止操作と連動していない場合よりも目標駆動トルクの増加度合いを大きくする処理を行う。
(もっと読む)
他車認識システム

【課題】周辺物検出装置で見失った監視対象車両と新たな検出車両との同一性判断。
【解決手段】自車の周辺の他車情報を受信する通信装置30と、自車の周辺の他車を検出する周辺物検出装置20と、を備え、前記他車情報の発信車両が前記周辺物検出装置20の検出範囲から離脱した際の離脱方向と、前記発信車両が前記検出範囲から離脱した後で車両が前記検出範囲に進入した際の進入方向と、に基づいて、前記検出範囲に進入した車両が前記発信車両と同一の車両か判断すること。その際、前記進入方向と前記離脱方向とが異なる場合に、前記検出範囲に進入した車両を前記発信車両とは異なる車両と判断する。
(もっと読む)
走行制御装置
【課題】 簡単な機構により容易にオートクルーズ走行制御が可能となる。
【解決手段】 走行車体に設けられた変速ペダルと、変速ペダルの踏み込み量を検出するペダルセンサ30と、走行車体のエンジンの動力を変速して出力する油圧式無段変速機32と、ペダルセンサからの出力に基づいて、油圧式無段変速機32を制御する制御部31と、オートクルーズモードを指示するオートクルーズスイッチ42と、を備え、制御部31は、オートクルーズスイッチ42から指示が出された場合、その指示がなされた際の、変速ペダルの最大踏み込み量時の走行車体速度MAX1,2で、車体速度が一定に維持されるように、油圧式無段変速機32を制御する、走行制御装置。
(もっと読む)
トラクタ
【課題】本発明では、作業中のエンジン回転数を負荷変動に応じて素早く最適燃費ラインの回転数に近づけるようにすることで、燃料消費量が少ないトラクタの走行制御装置を提供することを課題とする。
【解決手段】アクセルレバー33或はアクセルペダル34の開閉度合いを検出するスロットルセンサ20と、エンジン2の出力軸の回転数を検出するエンジン回転センサ22を設けると共に、前記スロットルセンサ20の検出開度に応じた最適回転数を制御装置40に記憶し、前記エンジン回転センサ22が検出するエンジン回転数とスロットルセンサ20の検出開度に応じた最適回転数の差を所定範囲に収めるように、エンジン回転制御部27と主変速制御部28とPTO変速制御部29を制御するように構成したことを特徴とするトラクタの構成とする。
(もっと読む)
車間距離制御装置
【課題】運転者の意図に従って目標車間距離の変更を確実に行うことができる車間距離制御装置を提供することを課題とする。
【解決手段】先行車との車間距離が目標車間距離になるように車両を制御する車間距離制御装置であって、運転者の変速操作を検出する変速操作検出手段と、変速操作検出手段により検出した変速操作に基づいて目標車間距離を変更する目標車間距離変更手段とを備えることを特徴とし、特に、目標車間距離変更手段では、車間距離制御中に変速操作検出手段により高速シフトから低速シフトへの変更を検出した後に低速シフトから高速シフトへの変更を検出したときの車間距離に基づいて目標車間距離を変更したり、あるいは、車間距離制御中に変速操作検出手段によりマニュアルモードへの操作を検出した場合にマニュアルモードにおける各操作に応じて目標車間距離を拡大又は縮小する。
(もっと読む)
車両の走行制御装置
【課題】クルーズコントローラの設定スイッチの誤操作を抑制できるとともに、該設定スイッチの操作性を向上させる。
【解決手段】車両の走行速度を目標速度に維持するように該車両を加減速制御するクルーズ走行制御を行うACCコントローラ37を備えている車両の走行制御装置である。車両のドライバにより操作されるシフトレバー3と、少なくともP、R、N、Dの各ポジション7,9,11,13が設定され、該シフトレバー3を該各ポジション7,9,11,13に案内するためのシフトゲート5とを有している、車両の自動変速機53を操作するためのシフトレバーユニット1をさらに備えている。シフトレバーユニット1には、上記目標速度を設定するためのセットスイッチ3,45が設けられている。
(もっと読む)
作業車
【課題】本発明では、オートクルーズを設定して走行して解除し、再度オートクルーズ走行に戻った場合に安全に走行することを課題とする。
【解決手段】無段変速装置と第二有段変速装置及び第一有段変速装置を走行装置の動力伝動径路に設けた作業車において、前進走行中にオンすることでその時点における無段変速装置の変速位置と第二有段変速装置及び第一有段変速装置の変速段をオートクルーズ条件として記憶し、そのオートクルーズ条件を維持するように制御するオートクルーズスイッチと、オートクルーズ条件を解除した後にオンすると再度事前のオートクルーズ条件での走行に復帰するオートクルーズ復帰スイッチを設け、オートクルーズ復帰スイッチを操作してオートクルーズ速度への復帰は、前記第二有段変速装置及び第一有段変速装置の変速段が変更されていない条件でのみ行われるようにしたことを特徴とする作業車の構成とする。
(もっと読む)
車両の車速制御装置
【課題】車速制限制御終了後の車両の増速に際し車両の走行状況に応じて車両の増速度合を変化させることにより、車速制限制御終了後の車両の増速時に車両の乗員が増速に違和感を覚えることを防止する。
【解決手段】速度制限制御の終了条件が成立すると(ステップ320)、前後加速度Gxの定常成分に基づいて走行路の傾斜勾配Gslopeが推定され(ステップ330)、走行路の傾斜勾配Gslopeに基づいて補正係数Kgが演算され(ステップ340)、車速Vに基づいて車両の目標加速度Gxatが演算され(ステップ350)、補正係数Kgと目標加速度Gxatと図3に示されたフローチャートによる制御のサイクルタイムTcとの積と、前サイクルの車両の目標車速Vat(n-1)との和として目標車速Vatが演算され(ステップ360)、車速Vが目標車速Vatになるよう各車輪の制駆動力が制御される(ステップ370)。
(もっと読む)
居眠り警報装置
【課題】運転者の居眠りを検知したときに、周囲の交通の流れを可能な限り乱さずに運転者を覚醒させる居眠り警報装置を提供することを課題とする。
【解決手段】
この居眠り警報装置は、複数の変速段を有する変速機と、この変速機の変速制御を行うドライブトレインECU15と、車速を定速制御する定速制御装置14とを備える車両に搭載される。居眠り警報ECU11は、運転者の居眠り状態を検知するドライバモニタカメラ12の検知結果に基づいて運転者が居眠り状態であると判定すると、ドライブトレインECU15に変速段をダウンシフトさせ、定速制御装置14に車速を定速制御させる。
(もっと読む)
車両の走行制御装置
【課題】先行車との車間距離に係る複数の制御系として、高速道路走行時のみ使われることを前提に構成される制御系A、一般道路走行時にも使われることを前提に構成される制御系B、を備える車両の走行制御装置において、仮想的な車線形状から確定される先行車に対する捕捉性を高める。
【解決手段】自車進行路の車線幅として制御系Aの動作モード時に高速道路走行に適合する車線幅を設定すると共にそれ以外のときは一般道路走行に適合する車線幅に設定する手段(S6〜S8)、自車進行路の曲率と車線幅とから自車進行路の車線形状を設定する手段(S9)、自車進行路の車線形状上の最も近い前方車を先行車と確定する手段(S10)、を備える。
(もっと読む)
車両用運転操作補助装置
【課題】車両制御モードの切換を運転者が容易に覚知することができる車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、先行車両に追従走行する自動制御モード、および、アクセルペダル50の操作に応じて単独走行する手動制御モードのいずれかの車両制御モードによって自車両を走行制御する走行制御手段30、40と、車両制御モードを切り換えるモード切換手段30と、モード切換手段30により車両制御モードが切り換えられると、車両特性を一時的に所定の特性に変更する変更手段40とを備える。
(もっと読む)
車両制御装置
【課題】アクセル操作とブレーキ操作を1つのペダルで兼用する車両制御装置において、従来よりも車速制御をしやすくすること。
【解決手段】ペダル40の踏み込み量によって車速を制御する速度制御部100を設ける。この速度制御部100は、ペダル40が速度制御踏み込み範囲内で踏み込まれたときは車速を減速させ、速度制御踏み込み範囲内でペダル40が戻されたときは車速を加速させる。また、ペダル40が速度制御踏み込み範囲よりも深い制動範囲まで踏み込まれたときは、その踏み込み量に応じた制動力で車両を制動させる。ペダル40の踏み込み量の大小によって車速を制御することができるので、速度制御がしやすくなる。しかも、速度制御踏み込み範囲を超えてさらに深い範囲まで十分に踏み込むことにより急ブレーキをかけることも可能となる。
(もっと読む)
滑走艇の運転制御装置
【課題】エンジンが過回転状態にあるときにクルーズ制御操作手段が操作されても、エンジンが過回転状態に保持されることのない滑走艇の運転制御装置を提供する。
【解決手段】エンジン5が特定運転状態であるか否かを判定する特定運転状態判定手段30を設け、モード設定手段30は、エンジン5が特定運転状態であると判定された時は速度設定モードへのモード設定を禁止し、上記特定運転状態でないと判定された時は上記速度設定モードへのモード設定を許可する。
(もっと読む)
作業車両
【課題】前記車速維持機構を簡単に構成できるものでありながら、運転操作性等を簡単に向上できる作業車両を提供するものである。
【解決手段】走行車輪3,4を備えた走行機体2に搭載されたエンジン5と、エンジン5からの動力を変速する油圧式無段変速機25と、油圧式無段変速機25の変速出力を増減速操作する変速ペダル31,32と、油圧式無段変速機25の変速出力を略一定に維持する車速維持手段49とを備えてなる作業車両において、変速ペダル31,32の足踏み操作位置を検出する変速位置センサ47と、車速維持手段49を作動する手動操作用のクルーズスイッチ72とを備え、変速ペダル31,32を足踏み操作した状態で、クルーズスイッチ72をオン操作することにより、車速が略一定に維持されるように構成したものである
(もっと読む)
作業車両の走行速度制御装置
【課題】容易な操作により作業車両の走行速度を一定に維持する走行速度制御装置を提供する。
【解決手段】変速ペダル15を油圧式無段変速装置17と連動連結し、変速ペダル15を任意の踏込操作位置で固定することにより、変速操作された走行速度に一定に維持するトラクタ1の走行速度制御装置であって、変速ペダル15にクルーズアーム40と係止部材41を設け、クルーズアーム40を足の回動操作により操作可能に構成した。そして、変速ペダル15の側方にブレーキペダル25を配置し、ブレーキペダル25の側部にクルーズ解除部材である突起部25aを設けた。
(もっと読む)
自動車の走行制御装置
【課題】
先行車の追従走行時において、ドライバーに違和感のない加減速を実現する自動車の走行制御装置を提供することを目的とする。
【解決手段】
先行車を追従走行しているときに、先行車のカーブ進入速度と先行車までの距離を記憶部16に記憶しておき、自車がその地点に到達したときに記憶した先行車の速度以下となるように、例えばスロットル24,変速機26,ブレーキアクチュエータ27の少なくとも1つを用いて自車速度を制御する自車速度の制御を行う。
(もっと読む)
作業車両
【課題】車速維持機構を簡単な構造にしながら、運転操作性等を向上できるようにした作業車両の提供。
【解決手段】車速維持機構は、係脱可能に係合させる複数の係止爪を有する係止アームと、係止体とを備え、前記変速ペダルに前記係止アームを連結し、車速維持用の手動操作レバーに前記係止体を連結し、前記変速ペダルを踏込み位置から初期位置に戻して車速を略零にするための初期位置復帰バネの付勢力によって、前記係止爪と前記係止体との係合を維持可能に構成。
(もっと読む)
車両用走行制御装置
【課題】 クラッチペダルが操作されているときであっても走行制御が可能となり、走行性能を向上することができる車両用走行制御装置を提供する。
【解決手段】 車両に搭載された内燃機関の出力を駆動輪に伝達する手動変速手段と、その変速段を検出する変速段検出手段と、運転者によるクラッチペダル操作を検出するクラッチペダル操作検出手段と、内燃機関の回転数を検出する回転数検出手段と、車両の走行速度を検出する走行速度検出手段と、目標車速を設定する目標車速設定手段と、その出力に基づいて車両を加減速させる加減速手段とを備える。検出された変速段と走行速度に基づいて内燃機関の目標回転数を算出する目標回転数算出手段と、走行制御手段による走行制御中に運転者によるクラッチペダル操作が検出された場合には、内燃機関の回転数を目標回転数に基づいて制御を行う回転数制御手段とを備えた。
(もっと読む)
車両の制御装置
【課題】 ブレーキ振動あるいは異音の発生を防止もしくは抑制するための制御が行われる際に、車両の走行状態が変化して乗員に違和感を与えてしまうことを回避できる車両の制御装置を提供する。
【解決手段】 乗員の操作と独立して制動装置を制御して各車輪の制動トルクを設定する制動トルク設定手段と、制動装置の振動を検出する振動検出手段(ステップS101)とを備え、制動装置の振動が検出された場合に振動を抑制する車両の制御装置において、乗員の操作と独立して動力源の出力を制御して各車輪の駆動トルクを設定する駆動トルク設定手段と、車両の走行状態を検出する走行状態検出手段(ステップS102)と、制動装置の振動が検出された場合に、走行状態に基づいて制動トルクと駆動トルクとの少なくともいずれか一方を変更する振動抑制手段(ステップS104,S105)とを備えている。
(もっと読む)
走行制御装置
【課題】隣接車線を走行する車両が横風やカント路面の影響を受けて自車線に近づいてきた場合に、的確にブレーキ予圧を発生させる。
【解決手段】自車に横加速度が発生しているときは、自車が横風を受けているか、あるいはカント路面を走行していると判断し、横加速度の発生方向と逆の方向の自車前方に、隣接車線を走行する車両が検出された場合に、その隣接車が横風やカントとの影響を受けて自車線に接近、もしくは進入する可能性が高いと判断し、ブレーキ予圧を発生させる。隣接車が自車の前方にきたときに運転者がブレーキペダルを操作すると直ちに制動力が発生し、ブレーキ操作に対する応答性を向上させ、空走距離の短縮を図ることができる。
(もっと読む)
1 - 20 / 21
[ Back to top ]