
Fターム[3D244AC22]の内容
定速走行制御 (7,912) | 入力信号 (2,923) | 車両の状態に関するもの (1,907) | 変速装置 (106) | 変速比、変速位置 (85)
Fターム[3D244AC22]に分類される特許
1 - 20 / 85
車両の走行制御装置
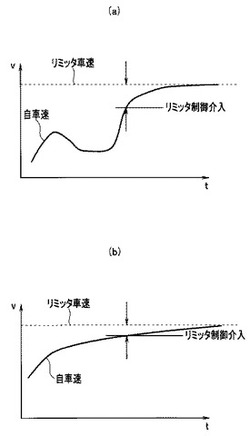
【課題】車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制する。
【解決手段】自車両の車速がリミッタ車速に向かって上昇していくとき、加速度の大きい場合は早めにリミッタ制御を開始させることで車速超過を抑え、緩やかな加速の場合はなるべくリミッタ制御が介入しないようにしてドライバの意図に沿った運転を可能とする、また、ドライバのアクセル操作による要求トルクからリミッタ制御の要求トルクへの大きなトルク変動が予想される場合には、トルクの繋がりを滑らかにして目標トルクとなるまでに要する時間を考慮し、リミッタ制御の介入タイミングを調整する。そして、最終的に、少なくとも加速度による要因とトルク変動の要因とを総合的に判断してリミッタ作動領域を設定することにより、車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制することができる。
(もっと読む)
車両の走行制御装置

【課題】車速制限制御に切り換えられた際に、自車両の車速を制限車速に滑らかに収束させると共に、不自然な変速を防止する。
【解決手段】自車両の車速リミッタ作動領域に入っているか否かを調べ(S4)、リミッタ作動領域内に入った場合、ドライバのアクセル操作に基づくドライバ要求トルクTdとリミッタ制御のリミッタ要求トルクTlmとを比較し(S6)、Td>Tlmの場合、リミッタ要求トルクTlmを目標トルクTGTとして設定し(S7)、Td≦Tlmの場合、ドライバ要求トルクTdを目標トルクTGTとして設定し(S8)、自車両の車速をリミッタ車速に円滑に収束させる。また、このとき、クルーズ制御における仮想アクセル開度を用いてリミッタ制御時の変速を制御することで、不自然な変速を防止する。
(もっと読む)
車両用運転支援装置
【課題】勾配路での変速機のダウンシフトが行われない場合にも、ブレーキの自動介入時間を増加させることなく良好な車速制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ACCの実行中にブレーキの自動介入制御が設定時間t0以上継続したことを判定したとき、目標加速度aを予め設定された負側の値Bまで変化させ、変化させた目標加速度aを、基本目標加速度a0が正側の設定値a0thを越えるまでの間維持する割込制御を行う。
(もっと読む)
クルーズコントロールシステム
【課題】先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用する。
【解決手段】ACC制御中で自車両が停止した場合(S2)、自車両の停止保持状態をブレーキ圧やEPBの作動によって確認し(S3)、さらに、アイドルストップ実行条件が成立するか否かを調べる(S4)。そして、アイドルストップ実行条件が成立する場合、ACC制御ユニットからアイドルストップ制御ユニットにエンジン停止指令を出力し、エンジンのアイドル運転を停止させ、エンジンを自動停止させる(S5)。これにより、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
(もっと読む)
オートクルーズ制御装置
【課題】オートクルーズ走行中の車間距離制御において減速を行うとき、適切なタイミングでシフトダウンを行うことで、前走車が加速に移行したときにも円滑に追従することのできるオートクルーズ制御装置を提供すること。
【解決手段】オートクルーズ制御実行中(S1)に車間距離制御(S2)が行われて、減速を行うときは(S4)、目標車速に応じて設定されるオートクルーズ制御用の変速に係る減速時のエンジン回転数閾値よりも高い値である車間距離制御用の減速時のエンジン回転数閾値を用い、エンジン回転数が当該閾値以下である場合(S8)にシフトダウンを実施する(S9)。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】定速走行制御時における頻繁なエンジンの始動・停止が行われるのを防ぐこと。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両において、走行速度をステアリングスイッチで設定された目標速度を維持するように自動調整する定速走行制御を行っているとき、エンジン1の始動後モータジェネレータ2の駆動源であるバッテリが設定したクルーズ時SOC停止判定値に充電されるまでの間、エンジン1の停止を禁止する制御を行う。
(もっと読む)
車両用走行制御装置
【課題】自動変速モードを選択したオートクルーズ制御中に手動変速モードへの切換が指令されたときに、それに応じて変速制御モードの切換とオートクルーズ制御の作動状態とを適切に連係でき、もって運転者の意志を反映した適切な車両の走行を実現できる車両用走行制御装置を提供する。
【解決手段】オートクルーズ制御中に手動変速レンジ(A/Mレンジ、+−レンジ)への切換操作がなされたとき(S24がYes)、運転者の加減速要求であると見なし、オートクルーズを解除して手動変速モードを選択することで任意の手動変速を可能とし(S26,28)、一方、オートクルーズ制御中にNレンジへの切換操作がなされたときには誤操作と見なし(S24がNo)、オートクルーズを解除して自動変速モードを選択し不適切な変速を防止する(S14,16)。
(もっと読む)
ブレーキ制御装置
【課題】クルーズシステムにより走行停止させることに伴いアイドルストップシステムによりエンジンを自動停止させた場合に、車両が動き出してしまうことの防止を図ったブレーキ制御装置を提供する。
【解決手段】先行車両の走行停止に伴い自車両を走行停止させるよう制動ブレーキを自動作動させるクルーズシステムと、エンジン20を自動停止させるアイドルストップシステムと、パーキングブレーキ(パーキング用ブレーキシュー53)を電動モータ50で自動作動させる電動パーキングブレーキシステムと、を備えた車両に適用され、前記クルーズシステムにより走行停止させることに伴い前記アイドルストップシステムによりエンジン20を自動停止させた場合には、前記電動パーキングブレーキシステムによりパーキングブレーキを自動作動させる。
(もっと読む)
車両の制御装置
【課題】車速を目標車速に制御するクルーズコントロールが実行可能な車両において、クルーズコントロール実行中のエネルギ消費を抑制して効率を高める。
【解決手段】クルーズコントロール時にはドライバが継続的な定速走行を希望しており、回生による制動力を発生させる必要がない点に着目し、クルーズコントロール時に定速走行管理範囲(具体的には、許容下限値M≦[加速度α]≦許容上限値N、及び、許容下限値m≦[車速V]≦許容上限値の範囲)内で惰行走行状態を作り出すことにより、エネルギの消費を低減するとともに、エネルギの電気パス通過分を抑制してエネルギ損失を低減する。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、前記変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときのブレーキ制御を運転者の要求に適合させるように行うことを課題とする。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつエンジンの駆動制御とブレーキの制動制御とでオートクルーズ制御を行う車両において、前記制動制御が行われている状態で、エンジンから駆動輪への動力伝達を遮断する動力遮断操作が行われ、この状態で前記手動変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときに、該アクセルペダルの踏み込み量が所定値より大きいときは前記制動制御を解除し、該アクセルペダルの踏み込み量が前記所定値より大きくないときは前記制動制御を継続する制動制御手段を備える。
(もっと読む)
運転支援装置
【課題】ドライバに与える違和感を軽減することができる運転支援装置を提供する。
【解決手段】 運転支援装置1のECU7は、自車両の現在位置と地図データベース13の情報とに基づいて、目標車速設定地点での自車両の目標車速等を演算するパラメータ演算部8と、車速センサ5により検出された車速及び目標車速等に基づいて、自車両の目標減速度を演算すると共に、その目標減速度から減速アシスト制御量の変更回数を決定する目標減速度演算部10と、目標減速度演算部10により求められた目標減速度及び車速センサ5により検出された車速に基づいて、シフト段数及びブレーキ制御量を演算する制駆動配分演算部11と、シフト段数及びブレーキ制御量に応じてシフト及びブレーキを制御する車両制御部12とを有している。目標減速度演算部10は、目標減速度が高いほど減速アシスト制御量の変更回数を少なくする。
(もっと読む)
車速制御装置
【課題】指示速度と無段変速装置からの出力車速とを対応させるための走行テストを、比較的狭小なコースで、かつ、テスト時間も短くて済むようにする。
【解決手段】指示速度L1,L2,L3に対応する基準の変速操作位置H1,H2,H3を設定する基準車速設定手段103で、複数の指示速度のうち、最高速側の指示速度L3よりも低速側の指示速度L1,L2に相当する変速操作位置H1,H2は、車体を走行させての走行速度の検出結果から、選択された指示速度L1,L2に対応する基準の変速操作位置H1,H2として設定し、その他の指示速度L3に相当する変速操作位置H3を、所定の変化率に基づいた演算によって算出するように構成した。
(もっと読む)
車速制御装置
【課題】指示速度と無段変速装置からの出力車速とを対応させるための走行テストを、狭小なコースで、かつ、テスト時間も短くて済むようにする。
【解決手段】指示速度L1,L2,L3に対応する基準の変速操作位置H1,H2,H3を設定する基準車速設定手段を、無段変速装置7の変速操作位置を指示速度L1,L2,L3近くの速度に相当する試験走行用の変速操作位置thに設定して車体を走行させ、その試験走行用の変速操作位置thにおける走行速度の検出結果から、指示速度L1,L2,L3に対応する変速操作位置を推定して、指示速度L1,L2,L3に対応する基準の変速操作位置H1,H2,H3として設定するように構成した。
(もっと読む)
車両の制御装置
【課題】オートクルーズ走行中におけるドライバビリティの悪化を防ぐことが可能な車両の制御装置を提供する。
【解決手段】上記の車両の制御装置は、第1変速モードと第2変速モードとの2つの間で変速モードを切り換え可能に構成されており、例えばECU(Electronic Control Unit)などの制御手段を備える。制御手段は、設定された車速を維持するように制御されたオートクルーズ走行中において、変速モードの切り換えを禁止する。このようにすることで、オートクルーズ走行中において、エンジン音や駆動力の変化を抑えることができ、運転者に対して違和感を与えるのを防ぐことができる。
(もっと読む)
車両用走行制御装置
【課題】クルーズコントロールにおける燃費向上を図る。
【解決手段】目標車速と実車速との車速偏差に基づいて目標スロットル開度を算出する目標スロットル開度算出部38と、目標スロットル開度に基づいてスロットル開度制御を行うスロットル開度制御部34と、目標車速に対する実車速の低下許容値である車速偏差閾値を設定する車速低下許容値設定部36と、実車速に基づいてスロットル上限開度を算出するスロットル上限開度算出部37と、を備え、目標スロットル開度算出部38は、目標車速と実車速の車速偏差が車速偏差閾値以内の場合にはスロットル上限開度以下に目標スロットル開度を制限し、実車速が目標車速よりも車速偏差閾値以上低下した場合には、より大きなスロットル上限開度に切り替えて目標スロットル開度の制限を行う。
(もっと読む)
駆動源の制御装置
【課題】出力トルク制御の安定性を向上させる。
【解決手段】ECUは、パワートレーンドライブモデル9300と、パワートレーンマネージャ9100と、エンジン制御部9000とを含む。パワートレーンマネージャ9100は、エンジン回転数の履歴に基づく回転数の変化量と、動的な目標エンジントルクおよび推定トルクのうちのいずれか一方のトルクとに基づいて先読み時間経過後のエンジン回転数を予測する。エンジン制御部9000は、予測された回転数と動的な目標エンジントルクとに基づいてエンジン1000を制御する。
(もっと読む)
車両の速度制御装置
【課題】連続する2つのカーブを通過する際において運転者の感覚に合致した違和感の少ない速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】連続カーブ車速制御において、目標車速特性Vtoが、第1カーブの目標特性Vto1、カーブ間の目標特性Vtoz、第2カーブの目標特性Vto2が順に繋げられて構成される。第1、第2カーブの目標特性Vto*は、地点Pcr*まで減少して地点Pcr*にて適性車速Vqo*となり、その後、地点Pca*までVqo*に維持され、その後、地点Pca*から増大する特性a*−b*−c*−d*に決定される。カーブ間に対する制限車速Vqolが、適正車速Vqo*のうち大きい方にカーブ間距離に基づいて演算される増分Vupが加算されて演算される。このVqolに基づいてカーブ間の目標特性Vtozが特性X-Yに決定される。車速が目標車速特性Vtoに基づいて調整される。
(もっと読む)
自動走行解除装置
【課題】自動走行の解除時であっても運転者の加速意思を車両挙動に適切に反映させる。
【解決手段】自動走行解除装置10は、自動走行可能な車両に搭載され、自動走行の実行が設定された場合にフットレスト位置Prでのアクセルペダル反力を、フットレスト解除ペダル反力特性に応じたペダル反力より増大させ、アクセルペダルのペダルストローク位置がフットレスト位置Prから戻されたときに自動走行の実行を解除してフットレスト位置Prでのペダル反力をフットレスト解除ペダル反力特性に応じたペダル反力に戻し、この後、第1所定時間以内にアクセルペダルの再踏み込みによる運転者の加速意思を検出したときには、アクセルペダルのペダルストローク位置がフットレスト位置Prから戻されたときに解除された自動走行の実行時に駆動トルク特性として設定されていた自動走行時駆動トルク特性を、駆動トルク特性として再設定する。
(もっと読む)
車両の定速走行制御装置
【課題】制御系の制御対象をスロットル開度と変速比の2つを入力、車速を出力とするモデルで記述することにより、スロットル開度と変速比を協調させて定速走行制御を行うようにした定速走行制御装置を提供する。
【解決手段】エンジンと、その出力を変速する変速機と、それらが搭載される車体とを少なくとも備えた車両の定速走行制御装置において、車両システムを制御対象とし、少なくとも変速比とスロットル開度とを入力、車速を出力とするモデルで記述すると共に、車速が目標車速に一致するように、変速比とスロットル開度を制御する制御系(定速走行制御コントローラ)を備えると共に、制御系の指令に応じてエンジンのスロットルバルブを駆動してスロットル開度を調整するDBW機構と、変速機に油圧を供給する油圧機構などを備える。
(もっと読む)
1 - 20 / 85
[ Back to top ]