
Fターム[3D244AE27]の内容
Fターム[3D244AE27]に分類される特許
1 - 19 / 19
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
前後加速度制御装置

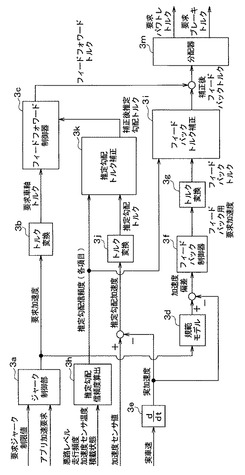
【課題】外乱によるフィードフォワード制御の精度低下を補完し、前後加速度制御性能を向上させる。
【解決手段】パワトレフィードフォワードトルクの信頼性が外乱要因による推定ブレーキトルクの信頼度の低下に伴って低下するため、パワトレフィードバックトルクをブレーキ信頼性を加味したパワトレトルクの信頼度に応じて補正する。また、ブレーキフィードフォワードトルクの信頼性が外乱要因による推定パワトレトルクの信頼度の低下に伴って低下するため、ブレーキフィードバックトルクをパワトレ信頼性を加味したブレーキトルクの信頼度に応じて補正する。これらにより、パワトレフィードフォワードトルクやブレーキフィードフォワードトルクの信頼性の低下分をパワトレフィードバックトルクもしくはブレーキフィードバックトルクの補正によって補完することが可能となる。
(もっと読む)
駆動源の制御装置
【課題】出力トルク制御の安定性を向上させる。
【解決手段】ECUは、パワートレーンドライブモデル9300と、パワートレーンマネージャ9100と、エンジン制御部9000とを含む。パワートレーンマネージャ9100は、エンジン回転数の履歴に基づく回転数の変化量と、動的な目標エンジントルクおよび推定トルクのうちのいずれか一方のトルクとに基づいて先読み時間経過後のエンジン回転数を予測する。エンジン制御部9000は、予測された回転数と動的な目標エンジントルクとに基づいてエンジン1000を制御する。
(もっと読む)
追従走行制御装置
【課題】追従走行の発進時に、制御のもたつきや先行車の挙動に起因にした変動のない、スムーズで滑らかな発進を実現する。
【解決手段】判断部22により先行車の発進と判断すると、検出部21の検出に基づき、先行車に対する自車1の追従状況に応じて時々刻々変化するFF制御の目標値を設定部23が設定する。そして、FF制御部24の走行制御により、設定された目標値に基づき、先行車の時々刻々の発進状況に応じたFF制御で自車がもたつきや変動のない、スムーズで滑らかな発進を実現する。
(もっと読む)
内燃機関の電子制御装置及び速度制御方法
【課題】スロットルバルブの開度の変更及びバルブの駆動位相の変更等に起因する速度の変動を低減して、目標速度を安定して維持することのできる内燃機関の速度制御装置を提供する。
【解決手段】スロットルバルブ駆動機構37によるスロットルバルブ36の開度を制御するスロットルバルブ制御部8Aと、可変バルブタイミング機構6によるバルブの駆動位相を制御するバルブ位相制御部8Bとを備えた内燃機関の電子制御装置8であって、前記バルブ位相制御部8Bに、前記スロットルバルブ制御部8Aによる前記スロットルバルブ36の制御開度が一定の下で目標速度を維持するように、前記バルブの駆動位相を制御する定速制御部8Cを備えている。
(もっと読む)
燃料噴射量制御システム
【課題】走行燃費向上に繋がる燃料噴射量制御と、車両の状態に対応した加速度の実現とを両立することが出来る燃料噴射量制御システムの提供。
【解決手段】オートクルーズスイッチ(9)と、車速を計測する装置(車速センサ7)と、トランスミッションのギヤ段を検出する装置(20)と、アクセル開度を計測する装置(アクセル開度センサ30)と、エンジン回転速度を計測する装置(40)と、計測された車速、トランスミッションのギヤ段、アクセル開度、エンジン回転速度、オートクルーズスイッチの操作内容が入力される制御装置(10)とを有し、該制御装置(10)は、車両の状態(例えば車速、車両積載状態、走行中の道路の勾配)に対応して噴射量制限の作動と解除を決定する機能を有する。
(もっと読む)
車両用燃料供給制限装置
【課題】クルーズコントロール中における燃料供給制限を拡大する。
【解決手段】車両用燃料供給制限装置1は、自車両の走行速度と目標速度との偏差に基づいて要求スロットル開度を算出するCCコントロール部21と、CCコントロール部21により算出された要求スロットル開度に基づいてスロットルを駆動するスロットルアクチュエータ15と、要求スロットル開度が燃料カット閾値以下の場合にエンジンに対しフューエルカットを行うとともに、フューエルカット時に要求スロットル開度が燃料カット閾値よりも大きい燃料カットのオフ閾値以上となった場合にエンジンへの燃料供給を再開する燃料供給制御部23と、燃料カットのオフ閾値よりも小さな値となるスロットル開度上限値を設定するスロットル開度制限手段とを備え、要求スロットル開度が燃料カット閾値以下でフューエルカットが行われた場合には、要求スロットル開度をスロットル開度上限値以下に制限する。
(もっと読む)
車両用制御装置
【課題】車両の燃費を向上させつつ、運転者の加速要求を駆動力に適切に反映させる。
【解決手段】車両用制御装置10は、車両の駆動力を発生する内燃機関Eの吸気系において吸入空気量を調整するDBWドライバ12およびDBW13とスロットル弁とを具備し、車間距離センサ33により検出される車間距離Dに基づき先行車両が存在しないと判定し、かつ、車両の発進時にアクセルペダルセンサ32により検出されるアクセルペダル開度APの変化が所定の下限閾値Lim_L以上かつ上限閾値Lim_H未満である場合に、標準発進加速状態であると判定し、内燃機関Eでの燃料消費量が最小となるようにしてスロットル弁による吸入空気量を制御する。
(もっと読む)
車両自動走行制御装置
【課題】実加速度が目標加速度に対して良好に追従しながら、車両を自動走行させることができる車両自動走行制御装置の提供。
【解決手段】フィードフォワード演算値及びフィードバック演算値の各演算値から目標要求トルクを求める目標要求トルク演算手段31と、その求めた目標要求トルクに基づいて車両を自動走行させるとともに、車両の何れかの車輪がスリップしたときに車輪のスリップを抑制するスリップ抑制制御を実行する自動走行制御手段Dとを備え、目標要求トルク演算手段31は、自動走行制御手段Dによってスリップ抑制制御が実行された場合、目標加速度と実加速度との偏差に基づくフィードバック演算値を保持し、その保持したフィードバック演算値及びフィードフォワード演算値の各演算値から目標要求トルクを求める。
(もっと読む)
車両用制御装置及び車両用制御システム
【課題】エンジン10のクランク軸12の回転力を自動変速装置14を介して駆動輪16へと伝達させる車両について、変速比の切り替え制御に伴い、その前後方向の実際の加速度を目標加速度によりフィードバック制御する制御性が低下すること。
【解決手段】実加速度と目標加速度とに基づき、比例積分微分演算によってフィードバック操作量が算出され、これに基づき、エンジン10及び自動変速装置14からなるパワートレインとブレーキアクチュエータ20とが操作される。自動変速装置14による変速比の切り替え制御中においては、比例項及び微分項を初期化するとともに、積分項を切り替え直前の値に保持する。
(もっと読む)
車速制限装置
【課題】制限速度を運転者の希望する値に容易に設定可能にする。
【解決手段】乗員により設定された制限速度を記憶する制限速度記憶部22と、自車両の走行速度が前記制限速度以下となるように制御する車速制御部23と、道路デ−タを記憶する道路データ記憶部12と、GPS受信器11で検出した自車両の位置および道路データ記憶部12に記憶された道路デ−タに基づいて自車両の道路位置を認識する道路位置認識部21と、を備え、制限速度記憶部22は、乗員により設定された制限速度と該制限速度が設定された自車両の道路位置とを対応させて記憶し、車速制御部23は、自車両が走行する道路位置に対応して制限速度が記憶されている場合には、自車両の現在位置に基づいて制限速度記憶部22に記憶された制限速度を選択し、この制限速度以下となるように自車両の走行速度を制御する。
(もっと読む)
車速制御装置及び車速制御プログラム
【課題】アクセルオーバライド状態の解除時に運転者に違和感を与えにくい減速制御を行うことが可能な車速制御装置を提供する。
【解決手段】車速制御装置は、車両の速度を設定速度に維持するための目標車軸トルクを演算し、演算した目標車軸トルクで車両を走行させる定速走行制御を行う。具体的には、設定速度と車両の走行に対する走行抵抗とに応じたフィードフォワード成分と、設定速度と車両の速度との偏差に応じたフィードバック成分とが含まれた駆動力を目標車軸トルクとして演算する。そして、定速走行制御中のアクセル操作により要求される要求駆動車軸トルクが目標車軸トルクを上回った場合には定速走行制御を中断し、要求駆動車軸トルクが目標車軸トルクを下回った時点で定速走行制御を再開する。
(もっと読む)
走行制御装置
【課題】運転者に不快感を与えることなく車輌を緩速走行させる走行制御装置を提供すること。
【解決手段】算出した走行軌跡に沿って車輌を目標速度で緩速走行させる走行制御装置Sは、緩速走行に対し運転者が抱く警戒度を推定する警戒度推定手段102と、警戒度推定手段102の推定結果に基づいて目標速度を決定する目標速度決定手段103と、を備える。また、走行制御装置Sは、駐車支援又は狭路通過支援に利用され、警戒度推定手段102は、算出した走行軌跡に沿って車輌を走行させた場合における周辺物と車輌との間の距離に基づいて警戒度を推定する。
(もっと読む)
車両交通システム及び車両用走行制御装置
【課題】本発明は、閉塞区間毎に敷設される通信装置の敷設範囲を小さくすることができる車両交通システムの提供と当該車両交通システムに適した車両用走行制御装置の提供を目的とする。
【解決手段】自動運転が可能な車両群Xが複数の閉塞区間に分割された走行路を走行する車両交通システムにおいて、車両群Xを停止させる停止信号を送信する通信コイル1及び車両群Xを進行させる進行信号を送信する通信コイル2が閉塞区間毎に敷設され、通信コイル1は通信コイル2の車両群Xの進行方向の手前に所定間隔空けて敷設されており、通信コイル1からの停止信号を受信した車両群Xが通信コイル2からの進行信号を受信可能な範囲に停止するように車両群Xの走行を制御することを特徴とする手段。
(もっと読む)
車両用走行制御装置
【課題】自車が走行する道路の種類に基づいて最適な走行制御手段を実行させる車両用走行制御装置を提供することを目的とする。
【解決手段】車両を設定速度で走行させる定速走行制御手段10と車両を設定車間距離で走行させる追従走行制御手段11とを有する車両用走行制御装置1は、車両位置における道路の種類を識別する道路種類識別手段12と、道路種類識別手段12により識別された道路の種類に基づいて、実行する走行制御手段を選択する走行制御選択手段13とを備える。
(もっと読む)
下り坂を運転する自動車の制御システム
【課題】 傾斜が急な道路上で運転するときに、ブレーキ・ペダルを運転者が作動させているか否かには関係なく、追加の制動モーメントを調節する坂下り制御システムを提供する。
【解決手段】 自動車の制動機器における坂下り制御システムは、運転者の作動には関係なく、アンチ・ロッキング制御機能および制動機能の双方に合わせて設計されている電気制御可能サービス・ブレーキ・システムと、自動車の個々の車輪に対して発生し、坂下り制御によって制御するそれぞれの操作対象変数である、制動圧力または制動モーメントの個々の調節を可能にするブレーキ・アクチュエータと、自動車の動作状態に関する変数を直接的または間接的に検出し、ブレーキ・ペダルが作動されているか否かには関係なく、傾斜が急な道路上で運転するときに、追加の制動モーメントを調節する、電子制御および/または規制のために設けられている電子制御ユニットとを備えている。
(もっと読む)
車両の駆動力制御装置
【課題】 先行車との車間距離に応じて変速比をダウンシフトする制御において、アクセルオフの状態では減速度が過大となり、車間距離が無用に大きくなり、または以後の加速応答が悪化する。
【解決手段】 先行車の加速状態または車間距離等を検出する車間距離センサを設け、自車が減速中かつ先行車が加速中であることを検出したときには、変速機の目標変速比をダウンシフト側に補正するのみならず、エンジンの目標出力をアイドルよりも増大側に補正する。これによりアクセルオフ時の減速度を抑制して車間距離の急拡大を回避すとともに、この状態からの加速応答を改善する。
(もっと読む)
車両の走行安全装置
【課題】 進行方向および通過中のカーブに対して適切に安全装置を作動させる。
【解決手段】 作動部64は、安全装置の作動時に運転意志検出部65にて運転者の加速意志が検出されないときには安全装置を作動させる所定期間を延長し、さらに、所定期間を延長している状態で運転意志検出部65により加速意志が検出されたときには所定期間を延長することを終了する。作動部64は、安全装置の作動時にヨーレートまたは横加速度の少なくとも何れかが増加傾向に変化することが検出されたときには安全装置を作動させる所定期間を延長し、さらに、所定期間を延長している状態でヨーレートまたは横加速度が増加傾向に変化しないことが検出されたときには所定期間を延長することを終了する。
(もっと読む)
車両用走行制御装置
【課題】 運転者の運転負荷を軽減する車両用走行制御装置を提供すること。
【解決手段】 車両において操作ペダル(例えば、アクセルペダル)の操作反力の大きさを制御する車両用走行制御装置であって、車両に作用する外力を推定又は検出する外力推定/検出手段と、上記外力推定/検出手段により推定又は検出された外力の大きさに基づいて上記操作ペダルのペダル反力特性を制御するペダル反力特性制御手段とを備える。外力推定/検出手段が車体と運転者との相対的な位置関係を変動させる走行環境(例えば路面状態)の変化を外力として推定又は検出し、ペダル反力特性制御手段は、外力推定/検出手段により推定又は検出された外力の大きさが大きくなるほど操作ペダルのペダル開度に対するペダル反力の増加勾配が大きくなるようにペダル反力特性を制御する。
(もっと読む)
1 - 19 / 19
[ Back to top ]