
Fターム[3D246HA12]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 操舵状態 (1,157) | 運転者の操舵状態 (1,067)
Fターム[3D246HA12]の下位に属するFターム
ハンドル舵角 (864)
ハンドル舵角速度、角加速度 (60)
ハンドル操舵トルク(操舵力) (107)
ハンドル戻し操作 (8)
Fターム[3D246HA12]に分類される特許
21 - 28 / 28
車両操作支援装置

【課題】路面状態に関わらず障害物回避が円滑に行われるようにする車両操作支援装置を提供することを課題とする。
【解決手段】本発明は、車両の走行時に障害物との衝突を回避するために運転者が行う衝突回避操作を支援する車両操作支援装置において、自車前方の障害物を検知する障害物検知手段801と、自車の走行状態と障害物の状態に基づいて、自車が障害物に衝突する可能性を判断する衝突判断手段802と、走行中の路面状態を推定する路面状態推定手段803と、衝突する可能性と推定した路面状態に基づいて、自車の減速度を制御する減速度制御手段804と、を備えることを特徴とする。
(もっと読む)
連結式車両用電子防止機構

【課題】連結車両におけるジャックナイフ現象などの兆候を検出し様々な防止処置が取れるシステムを提供する。
【解決手段】連結式車両用電子防止システムは、第1のヨーイング軸周りの牽引部分のヨーイング回転速度を検出するように構成された牽引部センサ108と、第2のヨーイング軸周りの被牽引部分のヨーイング回転速度を検出するように構成された被牽引部センサ106と、牽引部センサ108および被牽引部センサ106に接続された処理装置110とを備え、処理装置110が、牽引部センサ108および被牽引部センサ106から受信したデータに少なくとも部分的に基づいて、いつ修正制御を開始するかを決定する。
(もっと読む)
緊急ブレーキシステム
【課題】本発明は、走行中の自動車が停止したいときはブレーキペダルを踏み込むことにより停車していたが、ブレーキペダルを踏み込むまでに0.7秒の時間がかかるため、突発的な変化の時は間に合わず追突事故が多発しており、このような追突事故を防止することを目的とする。
【解決手段】自動車を走行中、突発的な変化を感じブレーキペダルを踏み込むが、ブレーキペダルの踏み込みの前には必ずアクセルペダルを戻すことに加え、ドライバーの脈拍又は血圧又は体温又は脳波が瞬間的に変化し、驚きの声や咄嗟にハンドルを強く握る事に着目。このアクセルペダル戻しからブレーキペダルへの右足の動きと体の体調変化や異常の声やハンドルを掴むなどの条件が一致した時、緊急状態と判断させ、自動的にブレーキ機能を働かせる。ブレーキペダルの踏込みよりいち早くブレーキ機能を働かせる事により、交通事故を大幅に減少させる事を目的とする。
(もっと読む)
車両
【課題】制動時に車体傾斜を伴い易い車両であっても、姿勢の傾きによって乗員に与える不安を抑制しつつ急制動し得る車両を提供すること。
【解決手段】本発明の車両によれば、車体に設けられている左右一対の車輪は、トウ角調整装置によってそれぞれ独立してトウ角を調整できると共に、車輪位置移動装置によって車体に対する相対的な位置を移動させることができるように構成され、制動手段によるトウ角調整装置及び車輪位置移動装置の作動によって、車輪にトウ角が付与されると共に、車輪の位置を車体に対して相対的に進行方向へ移動される。よって、制動時には、車輪のトウ角と車体に対する相対的位置との両方が調整されるので、制動時に生じる姿勢の傾きによって乗員に与える不安感を抑制することができる。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができる上に、走行時における優れた安全性を提供する車両用制御装置を提供すること。
【解決手段】本発明の車両用制御装置によれば、車輪と走行路面との間の摩擦係数を摩擦係数算出手段が算出すると共に、その摩擦係数算出手段が算出した摩擦係数に基づき車輪のキャンバー角の指令値をキャンバー角算出手段が算出し、その一方で、制動検出手段が検出した制動操作部材の操作状態に基づきキャンバー角制御装置を作動させる車輪を対象車輪選択手段が選択する。そして、キャンバー角算出手段が算出したキャンバー角の指令値に基づき、象車輪選択手段が選択した車輪のキャンバー角を第1のキャンバー角変更手段が調整する構成であるので、省燃費性能の向上を図りつつ、車輪のスリップを抑制するのに必要な摩擦係数を車輪が確実に発揮して、加速性能、制動性能或いは旋回性能の向上をより効果的に図ることができる。
(もっと読む)
車両の運転支援装置
【課題】現在の車両挙動のみならず、今後予想される車両挙動をも考慮して、直進状態からカーブ走行に至るまで、走行路の過渡状態における走行状況においても、車両の加減速度を適切に抑制し、先行車追従に際して円滑で違和感の無い快適な制御を可能とする。
【解決手段】追従走行制御の追従加減速制御において、自車速V0と自車両1に対する先行車の相対位置とに基づき自車両1が先行車に追従するのに必要な目標ヨーレートγtを演算する。また、目標ヨーレートγtに応じて第1の制限値Lmγ1を演算し、目標ヨーレートγtの単位時間あたりの変化量(γt−γtold)/Δtに応じて第2の制限値Lmγ2を演算し、目標ヨーレートγtと実ヨーレートγrとの偏差Δγ(=γt−γr)に応じて第3の制限値Lmγ3を演算し、これら第1,第2,第3の制限値の絶対値の最小のものを制限値Lmに設定して、目標加減速度aを制限値Lmで制限する。
(もっと読む)
走行速度調整システムを装備した自動車の運転者を警告するための方法
本発明は、間隔に関連した走行速度調整システムが装備されている自動車の運転者を警告するための方法に関し、この方法では、間隔に関連した走行速度調整中、間隔に関連した走行速度調整システムにより生じさせられた制動モーメントを用いて自動車が停止状態に保持され、また自動車を離れるために運転者が自動車を離れること又は運転者の離れる意図が認識可能である。本発明に従い、運転者の離れることを認識した場合又は運転者の離れる意図を認識した場合、自動車が運転者にとって知覚可能な運動をこうむるように前記の生じさせられた制動モーメントが変更又は調節される。 (もっと読む)
車両の衝突回避システム又は衝突軽減システム及びこれらを動作させるための方法
本発明は、車両(10)の衝突軽減システムの衝突回避システムを動作させるための方法に関する。車両(10)と潜在的な衝突対象物(11、20)との間の現在の走行間隔が検出され、第1の閾値(12)に達すると、第1の警告及び/又は通知機能が作動する。本発明によれば、第2の閾値(13)に達すると、自動的な部分制動と少なくとも1つの更なる安全措置との組合せを備えたシステム介入が開始される。本発明はまた、車両の衝突回避システム又は衝突軽減システムにも関する。 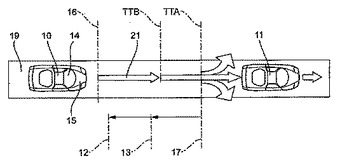 (もっと読む)
(もっと読む)
21 - 28 / 28
[ Back to top ]