
Fターム[3D246JB11]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 制御を許可するもの (107)
Fターム[3D246JB11]に分類される特許
81 - 100 / 107
ブレーキ装置
【課題】 自車が障害物に衝突する可能性があるときに、電動モータ32で作動するモータシリンダがブレーキ液圧を発生する応答性を高める。
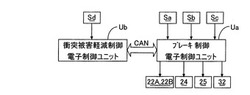
【解決手段】 レーダー装置やテレビカメラよりなる外界センシング手段Sdで検出した外界の状況に基づいて、衝突被害軽減制御電子制御ユニットUbが制動の緊急性を判定するとともに、判定した緊急性の大小に応じてモータシリンダの電動モータ32を弱め界磁制御あるいは進角制御するので、緊急時に電動モータ32の回転速度を高めてモータシリンダに速やかにブレーキ液圧を発生させ、制動の応答性を高めることができる。
(もっと読む)
車両の発進制御装置

【課題】 登坂路において締結要素の耐久性の向上を図ることが可能な車両の発進制御装置を提供すること。
【解決手段】 発進クラッチを備えた車両において、要求トルクが勾配負荷トルク相当値以下のときは、車輪に機械的制動トルクを付与すると共に、発進クラッチを解放することとした。
(もっと読む)
車両の走行制御装置及び車両の走行制御方法
【課題】制動条件の異なる2以上の制御モードを協調して車両を走行制御する際に、制御モードの切替を適切に行うことを可能とする。
【解決手段】互いに異なる制動条件で車両を制駆動制御する2以上の制御モードを協調制御して、走行状態に基づき採用する制御モードを切り替える車両の走行制御装置4である。走行路の勾配の状態に応じて、カーブ減速制御モードから一定速制御モードへの切替の閾値を変更する。具体的には、下り勾配であるほど、上記閾値を高くする。
(もっと読む)
車両の走行制御装置
【課題】運転者のシフトレバーの操作間違いやペダルの踏み間違いにより車両の安全走行状態が損なわれないように車両を制御すると共に、運転操作の誤りを違和感なく確実に運転者に理解させる。
【解決手段】車両の走行制御装置10は、車両の速度を検出する速度検出部2と、車両の加速度を検出する加速度検出部3と、車両の速度に応じて設定された上限加速度以内に、車両の加速度を制限する加速度制限部1と、を備える。
(もっと読む)
電動パーキングブレーキシステム
【課題】シフト連動制御が行われる電動パーキングブレーキシステムの使い勝手を向上させる。
【解決手段】自動動作禁止スイッチの操作により自動動作が禁止された状態(S28の判定がNO)において、停止指示位置から走行指示位置へのシフト操作が行われ(S27の判定がYES)、かつ、アクセル操作が行われた場合(S30の判定がYES)には、パーキングブレーキが自動で解除される(S29)。このように、自動動作が禁止された状態であっても、運転者の発進意図が検出された場合には、パーキングブレーキが解除されるため、運転者の発進意図に応じて車両を発進させることが可能となる。また、パーキングブレーキの作用状態で車両が発進させられることがないため、燃費が悪くなったり、摩擦材の摩耗が進んだりすることを回避することができるのであり、電動パーキングブレーキシステムの使い勝手を向上させることができる。
(もっと読む)
トレーラ牽引車両の制御方法、車両の揺動検出方法および車両
【課題】
本発明は、車両の揺動を検出し、必要に応じて適切に車両および/またはの揺動を低減させる車両の揺動検出・低減装置およびその方法を提供することを目的とする。
【解決手段】
トレーラの揺動力が車両に作用しているか否かを判定し、車両に当該揺動力が作用している場合には、車両のエンジントルクを減少させ、車両のそれぞれの車輪WHfr、WHfl、WHrr、WHrlに独立した制動力を供給することによって、車両および/または揺動を低減させる。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】運転手がブレーキ操作を行った場合に、該ブレーキ操作に対して運転手が感じる違和感を低減させることができる車両の制動制御装置、及び車両の制動制御方法を提供する。
【解決手段】ECUは、ブレーキレバー及びブレーキペダルが操作されていない場合に、連通液路上の第1開閉弁及び第2開閉弁を共に開き状態にして液圧回路の上流側ブレーキ液路と下流側ブレーキ液路とを連通させる連通制御を実行する。そして、この連通制御の実行中にブレーキレバー及びブレーキペダルのうち少なくとも一方が操作された場合(ステップS31が肯定判定)、ECUは、ポンプを駆動させることにより、リザーバ内のブレーキ液圧をマスタシリンダ側に吐出させる(ステップS32)。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】運転手がブレーキ操作手段を操作した場合に、その操作量に対して運転手が感じる違和感を低減させることができる車両の制動制御装置、及び車両の制動制御方法を提供する。
【解決手段】ECUは、イグニッションスイッチが「オン」になった場合において非ブレーキ操作判定条件Aが成立しているときには連通制御を実行する(ステップS24)。一方、ECUは、イグニッションスイッチが「オン」になった場合において非ブレーキ操作判定条件Aが非成立であるときには規制回数RCを「1」だけインクリメントする(ステップS20)。そして、ECUは、規制回数RCが規制回数閾値KRC以上である場合(ステップS22が肯定判定)には、報知制御を実行する(ステップS23)と共に連通制御を実行する(ステップS24)。
(もっと読む)
走行支援装置
【課題】 交差点における接触の慮を低減することが可能な走行支援装置を提供すること。
【解決手段】 走行支援ECU8によって、後続車の有無が判定され、その判定結果に基づいて、自車両の交差点への進入を抑制する進入抑制制御を実行するか否かを判断する。これにより、進入抑制制御を実行した場合には、自車両の交差点への進入を防止して、交差点内における接触の慮を低減することができる。また、進入抑制制御を実行しなかった場合には、自車両の急制動を回避して、自車両と後続車との接触の慮を低減することができる。
(もっと読む)
車両走行制御装置
【課題】主走行状態検出手段に異常が発生することで、異常な目標制御量に基づいて車速調整装置が作動されることを抑制することができる車両走行制御装置を提供する。
【解決手段】車両走行制御装置1に、車輪速度センサ3の他に、車両の走行状態を検出する駆動系回転センサ7を設ける。また、エンジンECU9は、自動走行制御ECU8により自動走行制御を行っている際に、駆動系回転センサ7での検出結果に基づいて算出した車速Veが異常判定条件を満たした場合には、自動走行制御は行わずに、エンジン100の通常制御を行う。このように、エンジンECU9に、駆動系回転センサ7での検出結果に基づいた異常判定条件を設定することにより、車輪速度センサ3に発生した異常を検出することができる。この結果、車輪速度センサ3に異常が発生することで、異常な目標制御量に基づいてエンジン100が作動されることを抑制することができる。
(もっと読む)
車両の自動ブレーキ制御装置
【課題】自動ブレーキの作動中において障害物検出手段の検出不能と障害物の移動に起因する急な消失とを的確に判別し、判別結果に応じて自動ブレーキの継続または解除を適切に実行できる車両の自動ブレーキ制御装置を提供する。
【解決手段】先行車との衝突回避する自動ブレーキ中においてレーザレーダが先行車を非検出状態になったとき、衝突までの予測時間から求めた補正後衝突予測時間Taの経過以前に衝突したときには(S18がYES)、レーザレーダの非検出状態が自車のノーズダイブにあると見なして自動ブレーキを継続して衝撃緩和を図り(S20)、衝突せずに補正後衝突予測時間Taが経過したときには(S16がYES)、レーザレーダの非検出状態が先行車の右左折による消失にあると見なし、自動ブレーキを解除して後続車の追突を防止する(S10)。
(もっと読む)
電動倍力機構を備えたブレーキ制御装置
【課題】電動倍力機構を備えたブレーキ装置において、ブレーキをかけ続けても、モータやインバータを過熱させることのないこと。
【構成】車輪に制動力を発生させるホイルシリンダとマスタシリンダとの間の連通をオンオフ制御する保持弁を備えて、ブレーキをかけ続けてホイルシリンダ内の昇圧状態が続く場合、前記保持弁を閉作動すると共に、前記電動モータへの通電量を低減するブレーキ制御装置。
(もっと読む)
車両の旋回時制御装置
【課題】車両の旋回時において旋回方向内側の車輪への制動力の付与によって車両の運転手が感じる引きずり感の増大を抑制しつつ、車両の旋回半径をより小さくできる車両の旋回時制御装置を提供する。
【解決手段】ECUは、ステアリングホイールの操舵角Aが操舵角閾値KA以上であること(ステップS11が肯定判定)、ブレーキ操作されていないこと(ステップS12が肯定判定)、アクセルペダルが操作されていること(ステップS13が肯定判定)、及び車両が低速で走行していること(ステップS16が肯定判定)が全て成立している場合に、旋回方向内側の後輪に対して制動力を付与する旋回時制動制御を実行する(ステップS17)。さらに、ECUは、車両が走行している路面が高μ路である(ステップS20が肯定判定)場合には路面のμ値を低下させるべく摩擦力低下制御も実行する(ステップS21)。
(もっと読む)
車輌の走行制御装置
【課題】乗員の車輌走行嗜好や運転者の運転意図に応じて転舵手段及び制駆動力制御手段に対し目標旋回制御量を適正に配分し、車輌の走行を適正に且つ効果的に制御する。
【解決手段】車輌を安定的に走行させるための車輌の目標ヨーモーメントMtが演算され(S20)、運転者特定ボタンの操作に基づき運転者が特定され(S130)、特定された運転者に対応する増減係数Kc及び転舵角制御に対する目標ヨーモーメントMtの配分率ωs3が設定され(S140)、制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωsとして演算され(S150)、配分率ωs1、ωbに基づき転舵角制御の目標ヨーモーメントMts及び制動力の制御の目標ヨーモーメントMtbが演算され(S160)、それぞれ目標ヨーモーメントMts及びMtbに基づき転舵角可変装置24及び制動装置36が制御される(S400〜430)。
(もっと読む)
車両運転支援システム、運転支援装置、車両及び車両運転支援方法
【課題】危険走行領域を回避して交差点で安全に車両を停止させ又は通過させる車両運転支援システム、運転支援装置、車両及び車両運転支援方法を提供する。
【解決手段】車載装置は、停止線までの距離、自車両の速度、交差点に設置された信号機の黄信号開始時点及び黄信号時間及び所定の標準減速度などに基づいて、自車両が交差点の手前に停止するための停止条件及び交差点に進入するための進入条件により決定される危険走行状態にあるか否かを判定する。車載装置は、危険走行状態にあると判定した場合、危険走行状態を回避するために、例えば、車両を停止線に停止させる場合には、車両を緩やかな減速度で減速するための処理を行い、あるいは、車両を交差点に進入させる場合には、車両を緩やかな加速度で加速するための処理を行う。
(もっと読む)
車両の車速制御装置
【課題】所定の設定速度に制御しつつ旋回限界を超えずに安定した旋回を確保可能な車両の車速制御装置を提供する。
【解決手段】先行車との目標車間距離に対応する所定の設定車速に応じた第1の目標車速指令値Vacc を演算し、その第1の目標車速指令値Vacc となるように車両の速度制御を行う先行車追従制御と、車両が安定して走行可能な限界旋回状態に近づいたと判定すると車両の安定した旋回走行を維持するために必要な目標減速度を演算しその目標減速度に応じた制動力を車両に負荷する旋回安定制御を行う。このとき、上記旋回安定制御が演算した目標減速度に応じた第2の目標車速指令値Vcop と、上記先行車追従制御が演算した第1の目標車速制令値とのいずれか小さい値側の目標車速指令値となるように排他的に車両の速度を制御する。
(もっと読む)
車両の運動制御装置
【課題】従来のように横滑り防止制御が行われる際に常にプレチャージを行うのではなく、より適切なときに予圧を行うことで、横滑り防止制御の効果の向上を図る。
【解決手段】切り返し状態になると想定される場合を判定し、この場合に予圧制御が実行されるようにする。これにより、より適切なときに予圧制御を開始することが可能となり、切り返し時により早いタイミングで旋回外輪に対して制動力を発生させられるため、旋回走行時にステアリングの切り返しが行われた場合に、切り込み時の横滑り低減機能を確保しつつ、切り返し方向における横滑りの発生を未然に低減させることが可能となる。
(もっと読む)
ABS動作モード切替装置
【課題】車両のメータユニットに、アンチロックブレーキシステムを停止モードに切り替えるためのスイッチを配設したABS動作モード切替装置を提供する。
【解決手段】メータユニット40に、アンチロックブレーキシステム(ABS)を機能させない停止モードに切り替えるためのABS切替スイッチ49を配設する。ABSを制御する制御部38は、ABS切替スイッチ49を押圧したオン状態のままメインスイッチがオンにされると、メータユニット40内のABS警告灯55を点灯し、ABS切替スイッチ49のオン状態が維持されたままABS警告灯55の点灯が第1の所定時間(例えば、5秒)継続されるとABS警告灯55を消灯し、このABS警告灯55の消灯後、第2の所定時間(例えば、1秒)が経過する前にABS切替スイッチ49が離されてオフ状態にされると、ABSを停止モードに切り替えると共に、ABS警告灯55の点滅を開始する。
(もっと読む)
車両およびその制御方法
【課題】シフトポジションが駐車ポジションにある状態で内燃機関を始動できるようにする。
【解決手段】シフトポジションSPが駐車ポジションにある状態でエンジンの始動指示がなされたときには、制御用シフトS*にリバースポジションを設定すると共に変速機が制御用シフトS*に対応する状態(リバースの状態)となるよう変速機を制御し(S200,S210)、変速機をリバースの状態として変速機の入力軸と駆動輪に連結された駆動軸とを接続した状態でモータMG1によりエンジンをモータリングして始動する(S220〜S280)。これにより、シフトポジションSPが駐車ポジションにある状態でもエンジンをモータリングして始動することができる。
(もっと読む)
車両減速の自動作動方法及びその装置
【課題】他の車両との衝突確率を表す変量が予め設定可能なしきい値を越えなければならず,その場合にしきい値は運転者反応,実際の走行状況又は環境状況に従って変更可能であることにより,衝突を阻止するために車両減速の自動作動方法と装置が提案される。
【解決手段】しきい値の変化を定めるために,操舵角度センサ,ブレーキペダルセンサ,アクセルペダルセンサ,車両速度を求める装置,走行路傾斜あるいは走行路勾配を求める装置,車両ヨーレートを求める装置,車両フロート角度を求める装置又は車両の環境内の,特に車両の前方領域内の静止対象と移動対象を検出する装置の信号が評価される。
(もっと読む)
81 - 100 / 107
[ Back to top ]