
Fターム[3D246JB51]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | フィードフォワード制御(オープン制御) (61)
Fターム[3D246JB51]に分類される特許
41 - 60 / 61
シフトダウン制御装置
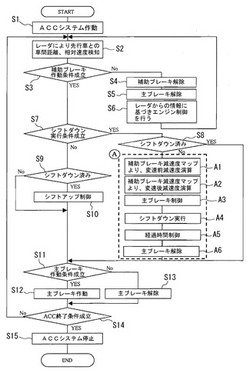
【課題】補助ブレーキ作動中のシフトダウン時における減速度の抜けを解消するシフトダウン制御装置を提案する。
【解決手段】オートクルーズコントロール中に補助ブレーキを作動させた後(S3)、シフトダウン条件が成立したときに(S7−S8)、機械式自動変速機がシフトダウン動作を開始して終了するまでの変速時間中に、主ブレーキを作動させ(A)、減速度の抜けを補填する。すなわち、クラッチが切れて補助ブレーキが利かなくなる間を、主ブレーキの制動力にて補填する。
(もっと読む)
車両制御装置

【課題】タイヤの状態をできるだけ反映した各車輪の制御を実現すること。
【解決手段】コントローラ50が、各車輪の接地荷重FZ からコーナリングスティフネスkf,krを求めるのに用いる、ROM52に記憶させたタイヤ摩擦量の区分毎の相関データ(テーブル)を、タイヤ摩耗量の変化に応じて使い分ける。タイヤ摩耗量は、各センサ111,113,115,117の出力を用いて求めた走行距離の累計値からコントローラ50で推定、演算しても良く、外部入力端末60の操作により入力されたものであっても良い。このようにして求めたコーナリングスティフネスを用いて、各車輪の駆動および制動のうち少なくとも一方をそれぞれ独立して制御する際の制御パラメータを求めることで、制御内容がタイヤ摩耗量の状態に応じた正確なものとなる。
(もっと読む)
車両制御装置
【課題】タイヤの状態をできるだけ反映した各車輪の制御を実現すること。
【解決手段】コントローラ50が、各車輪の接地荷重FZ からコーナリングスティフネスkf,krを求めるのに用いる、ROM52に記憶させたタイヤ空気圧毎の相関データ(テーブル)を、タイヤ空気圧の変化に応じて使い分ける。タイヤ空気圧は、各車輪20FL,20FR,20RL,20RRに対応する空気圧センサ60で検出する。このようにして求めたコーナリングスティフネスを用いて、各車輪の駆動および制動のうち少なくとも一方をそれぞれ独立して制御する際の制御パラメータを求めることで、制御内容がタイヤ空気圧の状態に応じた正確なものとなる。
(もっと読む)
車両の制御装置
【課題】緊急回避時における車両の応答性を向上する。
【解決手段】車両(1)の制御装置は、障害物を回避するための回避力を車両に付与可能である第1回避手段(23a、23b)と、回避力を打ち消す打消力又は回避力を車両に付与可能である第2回避手段(25a〜25d)とを備える車両を制御する制御装置であって、障害物を検知して、検知された障害物との衝突危険度を取得する危険度取得手段(102)と、取得された衝突危険度が危険度閾値より大きいことを条件に、回避力を車両に付与するように第1回避手段を制御すると共に、打消力を車両に付与するように第2回避手段を制御し、車両の運転者が所定種類の回避操作を行った際に、打消力を付与することを停止する又は打消力に代えて回避力を車両に付与するように第2回避手段を制御する制御手段(101)とを備える。
(もっと読む)
車両の制振制御装置
【課題】 先行車の車輪速等の情報を用いて車輪トルク制御により車体の振動を抑制する車両の制振制御に於いて、先行車の車速又はタイヤ径が自車両のものと異なる場合にも、先行車の情報から適切な車輪トルク補償成分を算定できる装置を提供すること。
【解決手段】 本発明の制振制御装置は、先行車からの情報を受信する情報受信部と、その情報を用いて自車の車体振動の振幅を抑制するよう算定された車輪トルク補償成分を用いて車輪トルクを制御する制振制御部と、制振制御部が車両の車速又は車輪径と先行車の車速又は車輪径に基づいて車輪トルク補償成分を補正する補償成分補正部を含むことを特徴とする。
(もっと読む)
パーキングブレーキおよびそれを動作するための方法
【解決手段】
パーキングブレーキ、およびこれを動作するための方法である。
この発明は、アクチュエータ(5)を有するパーキングブレーキに関し、アクチュエータ(5)は、2つの方向に動作することができ、さらに、アクチュエータ(5)のセルフロックのギア機構(24)によって、回転要素の方向に、またはそれから離れるようにパーキングブレーキを作動するか、または解除するための少なくとも1つのブレーキシューを移動する直流モータ(28)によって駆動される。
直流モータの運動の開ループ、または閉ループ制御を実行するための制御装置(10)も提供され、パーキングブレーキは、このパーキングブレーキが作動されるか、または解除されるときに、回転要素に対するブレーキシューの作動ポイントが、一般には行き過ぎるように設計される。
パーキングブレーキが作動されるときには、ブレーキ作動力の、または、パーキングブレーキが解除されるときには、ブレーキ作動クリアランスの設定の正確さおよび信頼性を増加するために、制御装置(10)は、ブレーキの作動中に直流モータによって取りあげられた電流の時間に関する1次微分係数の形成によって、作動ポイントを決定する。
そのようなパーキングブレーキを動作するための対応する方法も記述される。
(もっと読む)
車両自動走行制御装置
【課題】実加速度が目標加速度に対して良好に追従しながら、車両を自動走行させることができる車両自動走行制御装置の提供。
【解決手段】フィードフォワード演算値及びフィードバック演算値の各演算値から目標要求トルクを求める目標要求トルク演算手段31と、その求めた目標要求トルクに基づいて車両を自動走行させるとともに、車両の何れかの車輪がスリップしたときに車輪のスリップを抑制するスリップ抑制制御を実行する自動走行制御手段Dとを備え、目標要求トルク演算手段31は、自動走行制御手段Dによってスリップ抑制制御が実行された場合、目標加速度と実加速度との偏差に基づくフィードバック演算値を保持し、その保持したフィードバック演算値及びフィードフォワード演算値の各演算値から目標要求トルクを求める。
(もっと読む)
車両用制御装置及び制御システム
【課題】車両を停止状態から走行状態へと移行させるに際し、走行方向とは逆方向へと車両が変位するおそれがあること。
【解決手段】図18(d)に一点鎖線にて示すようにユーザのブレーキ操作によって制動トルクを低減させる場合には、制動トルクと駆動トルクとの合計が、路面の勾配に起因した重力のうちの走行方向とは逆方向の成分と釣り合うトルク(勾配トルクTrg)に満たないために、車両が走行方向とは逆方向へと変位するおそれがある。そこで、車両の加速度がゼロ以上となるまで、駆動トルクと制動トルクとの和が勾配トルクTrgとなるように、制動力を操作する。
(もっと読む)
車両用加速度制御装置
【課題】オーバシュートやアンダーシュートおよびハンチングを防ぎつつ、かつ、目標加速度に対する実加速度の追従性をより高める。
【解決手段】目標加速度の微分値の微分値であるDDTGに基づいてPID制御の比例ゲイン、積分ゲインおよび微分ゲインを設定することで、目標加速度に対する実加速度の追従性をより高めた制御を行うことが可能となる。このように、真に追従性を高めたい場合にのみゲインを大きくすることで、オーバシュートやアンダーシュートおよびハンチングを防ぎつつ、かつ、目標加速度に対する実加速度の追従性をより高めることが可能となる。
(もっと読む)
車両用停止制御装置及び制御システム
【課題】車両を自動的に停止させるに際し、車両の停止に伴うショックが生じること。
【解決手段】制御対象としての車両の応答特性を表現する車両モデルVMに、都度の車速に応じた要求加速度についての様々なパターンを入力する。この際、車両モデルVMから出力される車速及び加速度の描く軌跡は、各パターンに従って目標加速度を設定した場合の実際の車両の挙動を示すと考えられる。これら出力される軌跡の中から、車両の停止に際しての減速度が過度に大きくならないものを選択し、そのときの入力パターンに基づき、車両の目標加速度を適合する。
(もっと読む)
車両用制御装置及び制御システム
【課題】車両の駆動力を生成するパワートレイン(エンジン10、自動変速装置14)と、車両の制動力を生成するブレーキアクチュエータ20とを操作することで実際の加速度を目標加速度にフィードバック制御するに際し、それぞれの操作量を算出する処理やその適合を簡易且つ適切に行うこと、更には操作量の算出を適切に行うことが困難なこと。
【解決手段】車両の実際の加速度を目標加速度に制御する際の要求トルクをパワートレインのみによっては生成できなくなると予測される場合、予めブレーキアクチュエータ20のポンプPoを起動する。そして、ブレーキアクチュエータ20による制動力の使用開始とともに、フィードバック制御の制御ゲインを変更する。
(もっと読む)
車両のアンチロックブレーキ制御装置
【課題】車輪ブレーキのブレーキ力を調整し得るブレーキアクチュエータの作動を、車輪速度検出手段で検出された車輪速度ならびに車体速度に基づいて演算された目標車輪速度の比較結果に基づいて減少モード、保持モードおよび増加モードを切換えるようにしてブレーキ制御手段で制御する車両のアンチロックブレーキ制御装置において、ブレーキ力を増加する増加モードで目標ブレーキ力を最適化し、応答性および収束性を高める。
【解決手段】ブレーキ制御手段31は、増加モードでのブレーキ力の目標値を、今回の増加モード開始時のブレーキ力ならびに前回の減少モードでのブレーキ力の減少値に基づいて求めたフィードフォワード項に、車輪速度および目標車輪速度の偏差に基づいて求めたフィードバック項を加算して求め、増加モードでの車輪ブレーキのブレーキ力が前記目標値となるようにブレーキアクチュエータ5を制御する。
(もっと読む)
車両の制振制御装置
【課題】 車両の制動制御装置にて得られる車輪のスリップ状態を示す車輪スリップ状態量を利用する駆動出力制御による車両のピッチ・バウンス振動制振制御装置に於いて、制動制御装置が作動可能でないときに、不適切な制振制御が実行されることを回避すること。
【解決手段】 本発明の車両の制振制御装置は、制動制御装置から車輪スリップ状態量を取得して、車輪スリップ状態量が表すスリップの程度に基づいて駆動トルクの制御量を補正するが、制動制御装置が作動可能な状態でないときには、制動制御装置が作動可能な状態のときに比して駆動トルクの制御量を低減することを特徴とする。
(もっと読む)
制動制御装置、自動車および制動制御方法
【課題】ブレーキ圧の増圧あるいは減圧を繰り返す制動制御を行う際に、より効果的なブレーキ圧の制御を可能とすること。
【解決手段】自動車1Aは、ABS制御における増圧が行われる場合に、主油圧配管105より配管抵抗が大きいABS用流入配管106を介してホイールシリンダ104が増圧される。したがって、増圧モードにおいてインレットバルブ102aが開状態とされている間、ホイールシリンダ104の油圧が緩やかに上昇されるため、ABS制御における増圧を高精度に行うことができる。即ち、ブレーキ圧の増圧あるいは減圧を繰り返す制動制御を行う際に、より効果的なブレーキ圧の制御を行うことが可能となる。
(もっと読む)
車両挙動制御装置
【課題】車両において、車両の慣性主軸傾角に係わらず、所望の操舵応答性が得られるようにすること。
【解決手段】車両挙動制御装置は、車両に搭載され、車両の挙動制御を行う。車両挙動制御装置では、操舵角センサが車両におけるハンドルの操舵角δHを検出し、設定部が検出された操舵角δHと車両の慣性主軸傾角を含む車両データとに基づいて、車両に加える目標ヨーモーメントMを設定する。挙動制御部が、設定部が設定した目標ヨーモーメントMになるよう挙動制御を行う。
(もっと読む)
車両挙動制御装置
【課題】車両において、重量部材の重量及び重量部材を車体に対して弾性支持する弾性部材のバネ定数に係わらず、操舵応答性を向上させること。
【解決手段】車両挙動制御装置17は、車両に搭載され、車両の挙動制御を行う。車両挙動制御装置17では、操舵角センサ19が車両におけるハンドルの操舵角δHを検出し、設定部25が操舵角センサ19によって検出された操舵角δHと車両データとに基づいて、車両に加える目標ヨーモーメントMを設定する。車両データには、車両に搭載されるエンジンの重量と、車体に対してエンジンを弾性支持するエンジンマウントのバネ定数とが含まれる。挙動制御部が、設定部25が設定した目標ヨーモーメントMが発生するように挙動制御を行う。
(もっと読む)
車両の安定性を改善するための車両システムの制御方法
車両の安定性を制御する改良方法が、アクティブヨーコントロールシステム、アンチロックブレーキングシステムおよびトラクションコントロールシステムといった車両安定性制御システムの協調動作によって提供される。これらの方法は、路面摩擦係数μ、車輪スリップおよびヨー偏差を含む路面情報の認識を使用する。該方法は、引き続き、必要に応じて、アクティブダンピングシステムの設定及び/又は駆動トルクの配分を修理して、サスペンションにおけるダンピングを増加/低減させ、かつ車輪でのトルク適用をシフトさせ、それにより車両における著しい荷重のシフトを防ぎ、及び/又は車両ドライバビリティおよび快適性を改善する。アクティブダンピングシステムまたはトルク配分の調整は、予め運転者によって選択されたいずれかの特性を一時的にオーバライドする。  (もっと読む)
(もっと読む)
運転状態を検知するためのデバイス、及び結合された車両ブレーキ・システムの、駆動状態に依存する運転のための方法
本発明は、2アクセル・モータ車両の運転状態を決定するためのデバイスに係る。その運転状態は、モータ車両の運転状況及び下にある表面の状態から形成され、ここで、車両に搭載されたセンサーからの出力信号が、運転状況を決定するために、評価され、またここで、下にある表面の摩擦の値を決定するためおよび/または評価するためのルーチンが、下にある表面の状態を決定するために、もたらされる。本発明はまた、結合された車両ブレーキ・システムを運転するための方法に係り、特に、フロント・アクセルに油圧により駆動可能なホイール・ブレーキを有し且つリア・アクセルに電気機械的に駆動可能なホイール・ブレーキを有するモータ車両のための方法に係り、ここで、リア・アクセルに割り当てられた車両ホイールが、電動モータにより、少なくとも時折、駆動されることが可能であり、この電動モータは、制動のエネルギーの回復のための発電機として運転されることが可能であり、またこの電動モータは、発電機モードにおいて、リア・アクセルに割り当てられた車両ホイールに制動力を発生させ、またここで、ペダルの行程長センサーが、ドライバーからの制動の要求を決定し、この要求を制御及び調整ユニットに供給し、この制御及び調整ユニットは、油圧的により駆動可能なホイール・ブレーキ、電気機械的に駆動可能なホイール・ブレーキ、及び発電機モードで運転されることが可能な電動モータに対する、制動力の分配を実行する。 (もっと読む)
車両交通管理装置
【課題】多数の走行車両を安全にかつ高速・高密度に管理・運行・制御することを目的とする。
【解決手段】道路環境を検出する道路環境検出部Bと、車両の交通動態である車両の位置と速度を検出する交通動態検出部Aと、前記検出された道路環境、当該車両の位置および通常制動時の減速度ならびに当該車両の前方車両の位置、速度および緊急制動時の減速度に基づいて目標速度を決定する移動閉塞管理部Cと、この決定された目標速度で先行車両に追従するように制御する速度・車間制御部Dとを備えてなる。
(もっと読む)
妨害物をかわす際に衝突を回避するおよび/または衝突の結果を軽くするための方法および装置
車両を妨害物に対してかわす際に衝突を回避しおよび/または衝突結果を軽くするための方法および装置が提案され、その際少なくとも1つの周辺センサを用いて少なくとも1つの妨害物(3)が識別されかつ妨害物のデータが求められる。更に妨害物のデータ並びに車両のデータに基づいて、妨害物をかわす過程を支援するのに有利な車両減速度が求められかつ車両が相応に減速される。  (もっと読む)
(もっと読む)
41 - 60 / 61
[ Back to top ]