
Fターム[3D246JB51]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | フィードフォワード制御(オープン制御) (61)
Fターム[3D246JB51]に分類される特許
21 - 40 / 61
車両のヨーモーメント制御装置

【課題】 駆動力配分装置および横滑り防止装置を備えた車両において、両者の協調制御を的確に行って車両の安定性能の向上および制御応答性の向上を図る。
【解決手段】 駆動ヨーモーメントm8が最大駆動ヨーモーメントm10以下の場合には、協調制御部M11が駆動力配分装置Drに駆動ヨーモーメントm8を発生させるので、車両減速度を発生する横滑り防止装置VSAの作動を最小限に抑えて運転者の違和感を小さくすることができ、しかも駆動ヨーモーメントm8は立ち上がりが早いために、利き出しが滑らかであるだけでなく制御応答性が高められる。駆動ヨーモーメントm8が最大駆動ヨーモーメントm10を超えた場合には、協調制御部M11が駆動力配分装置Drに最大駆動ヨーモーメントm10を発生させるとともに、駆動ヨーモーメントm8に対する不足分を横滑り防止装置VSAに発生させるので、駆動力配分装置Drでは賄いきれない駆動モーメントm8を横滑り防止装置VSAで補って車両を安定化することができる。
(もっと読む)
車両用運動制御装置

【課題】ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行う車両用運動制御装置を提供する。
【解決手段】ステアリング制御とブレーキ制御のいずれをメインに行うかを選択し、その選択結果に基づいて、メインとされる側に対して行わせる車両旋回運動の要求値を出力すると共に、メインとされない側に目標値とメイン側要求値との差に応じた要求値を出力することで、ステアリング制御とブレーキ制御それぞれの配分を適切に設定する。これにより、ステアリング制御をメインとしつつブレーキ制御による補助を行うことが可能となるため、ステアリング制御のみの場合よりも目標値追従性を向上させた車両運動制御が行える。そして、ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行うことが可能となる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 左右の駆動輪に駆動力を配分制御してヨー運動を制御する際に、ヨー運動の制御初期の応答性を確保しながら、過制御により車両が不安定になるのを防止する。
【解決手段】 駆動源からの駆動力を左右の駆動輪に配分する駆動力配分量を車両の横方向挙動の状態量に基づいて制御する際に、前記駆動力配分量を、操舵角速度算出手段32で算出した操舵角速度θ′と横加速度変化率算出手段31で算出した横加速度変化率YG′とに基づいて補正するので、操舵角θよりも立ち上がりの変化が大きい操舵角速度θ′によりヨー運動の制御初期の応答性を確保しながら、車両の実際のヨー運動の状態を表す状態量である横加速度変化率YG′を用いることで、車両の横方向の運動性能の変化をフィードバックして駆動力配分制御に反映させ、これにより駆動力配分制御が過制御に陥るのを効果的に防止することができる。
(もっと読む)
車両安定化装置
【課題】自車両の衝突時に、運転者による不確実で信頼性の低い操作信号をもとに自車両の制動制御が実行されないようにした車両安定化装置を提供する。
【解決手段】少なくとも一つ以上の車両安定化制御用センサのセンサ情報に基づいて自車両の目標状態量を算出する目標状態量演算手段と、車両安定化制御用センサによって検出される自車両の状態量が目標状態量となるように自車両に制動力を付与する制動力付与手段と、を備えた車両安定化装置において、自車両の衝突の有無及び衝突位置を検出可能な衝突検出手段を備え、制動力付与手段は、自車両の衝突が検出された後の所定時間、目標状態量に基づく制動制御を中断するとともに、衝突位置に応じてあらかじめ決められた制動制御を実行する。
(もっと読む)
ブレーキ制御装置
【課題】車輪にかかる制動力の差を低減しつつ、ホイールシリンダへブレーキ液を供給するためのポンプを起動したときの突入電流の重なりを防ぐブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置100は、液圧回路中に設けられたポンプを介して、駆動に応じてホイールシリンダ6にブレーキ液を供給する複数のポンプと、ポンプを駆動することでホイールシリンダ6へのブレーキ液の供給を制御するとともに、複数のポンプによるブレーキ液の供給の応答性を比較する制御手段と、を備える。制御手段は、ポンプによるブレーキ液の供給の応答性にもとづいてモータの駆動の開始のタイミングを異ならせる。
(もっと読む)
制御要求調停装置
【課題】設計効率の高い制御要求調停装置を提供する。
【解決手段】制御プラットフォーム10では、位置制御要求調停部21が、位置を次元とする複数の制御要求を調停して出力し、位置制御要求変換部22が、位置制御要求調停部21からの制御要求を速度を次元とする制御要求に変換して出力する。そして、速度制御要求調停部31が、速度を次元とする複数の制御要求を調停して出力し、速度制御要求変換部32が、速度制御要求調停部31からの制御要求を加速度を次元とする制御要求に変換して出力する。さらに、加速度制御要求調停部41が、加速度を次元とする複数の制御要求を調停して出力し、加速度制御要求変換部42が、加速度制御要求調停部41からの制御要求を加速度制御を実現する制御装置に応じた次元(例えばトルク)の制御要求に変換して出力する。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
加速度制御装置
【課題】アダプティブクルーズ制御装置に用いられる加速度制御装置において、過渡状態における自車両の乗り心地を向上させること。
【解決手段】FBトルクゲイン補正部31は、自車両の走行状態が、走行中状態から停止直前状態、もしくは停止中状態から発進直後状態へと切り替わると、FBトルクゲインを第2設定値に変更する。これと共に、その停止直前状態、もしくは発進直後状態である間、FBトルクゲインを第2設定値に維持する。この第2設定値は、第1設定値よりも小さな値であるため、FBトルクゲインが第1設定値から第2設定値へと切り替えられると、FBトルク制御部30によって実行されるフィードバック制御についての応答遅れが大きくなる。これにより、過渡状態である場合のFB制御量は、時間の進行に対して緩やかに変更され、FB制御によって発生される制動トルクや駆動トルクが大きく変化することを防止できる。
(もっと読む)
加加速度情報を用いた車両の運動制御方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモ
ーメント量を調整すること。
【解決手段】入力された横方向の加加速度(Gy_dot)を、入力された車両の前後方向の速度(V)で除した値(Gy_dot/V)に対して、さらに入力された車両の横加速度(Gy)で除した値に比例した物理量に基づいて、車両の前後加速度の制御指令を生成し、生成された前記制御指令を出力する車両の運動制御方法。また、上記の車両の横方向の加加速度(Gy_dot)は、入力された横加速度を(Gy)をもとに求めること。また、入力された車両の横方向の加加速度(Gy_dot)に、速度(V)及び横加速度(Gy)から決定され、予め記憶されたゲイン(KGyV)を乗じ、乗じた値に基づいて、車両の前後加速度を制御する制御指令を生成し、生成された前記制御指令を出力する車両の運動制御方法。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法
【課題】路面摩擦係数に対して高い精度で推定対象の値を得る。
【解決手段】車両接地面摩擦状態推定装置は、基準路面摩擦係数とは異なる路面摩擦係数μ1及び該基準路面摩擦係数とは異なる路面摩擦係数μ1の路面でのスリップ角βt1を入力とし、入力されたスリップ角βt1に、基準路面摩擦係数μ0を路面摩擦係数μ1で除した値(μ0/μ1)を掛け算して基準路面でのスリップ角βt0を得て、基準路面摩擦係数の基準路面で得られるタイヤ力とスリップ度との相関関係で成立するタイヤ特性をモデル化したタイヤモデルに従い、掛け算して得た基準路面でのスリップ角βt0に対応する基準路面での横力Fy0を得て、その得た基準路面での横力Fy0に、路面摩擦係数μ1を基準路面摩擦係数μ0で除した値を掛け算して路面摩擦係数μ1の路面での横力Fy1を得る。
(もっと読む)
ハイブリッド車両のブレーキ操作の制御方法
本発明は、電気駆動モータ(12)のジェネレータモードによって制動可能である、ハイブリッド車両の油圧式の車両ブレーキ装置(1)のブレーキ操作を制御するための方法に関する。本発明によれば、車両ブレーキ装置に電気機械的なブレーキブースタ(13)が設けられており、電気駆動モータ(12)のジェネレータモードによる制動時に、ブレーキブースタ(13)によって、ブレーキペダル(15)におけるペダル力が形成される。 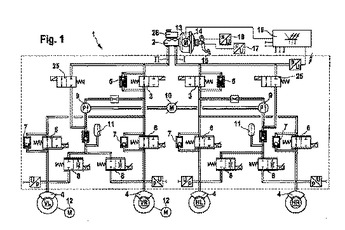 (もっと読む)
(もっと読む)
走行制御装置及び走行制御プログラム
【課題】車両の走行状況に応じて適切に走行制御を再開する。
【解決手段】目標車軸トルク生成部52は、車速維持演算部51により演算された目標加速度を実現するための目標車軸トルクとして、車両の走行に対する走行抵抗を加味したフィードフォワード成分が含まれた目標車軸トルクを算出する。制動調停部58は、目標車軸トルク生成部52から入力される目標車軸トルクと、ブレーキドライバモデル57により演算された運転者のブレーキ操作量に対応する要求制動車軸トルクのうち、減速量が大きい方のトルクを選択して制動要求トルク実現部59へ出力する。また、要求制動車軸トルクが目標車軸トルクを上回っている(減速量が大きい)状態では、ブレーキオーバライド信号をFBトルク演算部62へ出力する。制動要求トルク実現部59は、制動調停部58から入力した車軸トルクを実現するための制御信号をブレーキECU40へ出力する。
(もっと読む)
ブレーキ制御装置
【課題】液圧制御のための電磁弁等のアクチュエータおよびその制御装置を含むブレーキ制御装置の省電力化と小型化を実現可能にする。
【解決手段】ある態様のブレーキ制御装置においては、開閉弁を開閉させるためのリニアソレノイドへの通電制御において、その制御電流が起動電流から保持電流へ段階的に低くなるように制御される。また、起動電流の供給時には温度補正の完了の有無にかかわらず初期通電期間Δt0を確保するようにした。
(もっと読む)
作業機械のブレーキ・システムを作動するための方法および作業機械のためのブレーキ・システム
本発明は、作業機械(100)の少なくとも1つの地面係合要素(102L、102R、104L、104R)に直接または間接的に作用する少なくとも1つの操業ブレーキ(106L、106R、108L、108R)、完全係合位置と完全解放位置の間において移動可能な少なくとも1つの操業ブレーキ・アクチュエータ(20)、および作業機械(100)の推進を活動化するためのアクセル・アクチュエータ(22)を包含する作業機械(100)のためのブレーキ・システム(10)を作動するための方法に関する。前記ブレーキ・システム(10)の活動化状態においては、前記アクセル・アクチュエータ(22)が解放されたとき、前記少なくとも1つの操業ブレーキ・アクチュエータ(20)は、それの完全係合位置まで自動的に移動する。 (もっと読む)
車両制御装置
【課題】車両制御装置において、目標加速度に対する実加速度の応答遅れを低減すること。
【解決手段】ブレーキフィードバック制御部は、ブレーキフィードバック利用状態であれば、PID制御モデルを用いてブレーキフィードバックトルクTfb_BKを演算し(S330,S340)、ブレーキフィードバック制限状態であれば、PID制御モデルを用いたブレーキフィードバックトルクTfb_PTの演算を停止し、ブレーキ制限開始タイミング時に出力していたブレーキフィードバックトルクTfb_BKを出力値として保持する(S360)。そして、ブレーキ制限解除タイミングとなると、保持していたブレーキフィードバックトルクTfb_BKを初期値として、フィードバック制御を再開する。これにより、ブレーキ制御解除タイミング直後のブレーキ機構では、0[N・m]よりも大きい特定制動トルクを発生する。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】緩制動時においても操舵に対するヨーレートの応答の予測が容易なヨーイングモーメント制御を行う車両挙動制御装置および車両挙動制御方法の提供。
【解決手段】制御ゲイン設定手段が、車両の車両前後加速度に基づいてヨーイングモーメント制御における制御量を決定する制御ゲインを設定するときは、前記前後加速度が所定値よりも小さい領域(緩制動時:低G領域)では、前記前後加速度がほぼ零のとき(非制動時)に対してその制御ゲインを小さく設定する。これにより、緩制動時の操舵に対するヨーレートの応答が非制動時や高G領域とほぼ同じになるため、回避操作を行ったときのヨーレートの応答の予測が容易なヨーイングモーメント制御が可能となる。
(もっと読む)
ブレーキ制御装置
【課題】ペダルフィーリングを向上する。
【解決手段】ブレーキ制御装置10は、ホイールシリンダ54と、ブレーキペダル12と、マスタシリンダ14と、ポンプ22と、リニア制御弁32と、リニア制御弁32に供給する電流を調整して、マスタシリンダ14とホイールシリンダ54との間の差圧を制御するECU200とを備える。ECU200は、差圧を任意の第1差圧から任意の第2差圧まで減少させる場合、差圧を所定の第1時間の間に所定の差圧低減量だけ減少させる第1工程と、差圧を所定の第2時間の間略一定に保持する第2工程とを交互に繰り返しながら、差圧を減少させる。
(もっと読む)
自動車およびその制御方法
【課題】先行車両に追従する定速走行中の制御時における車両のエネルギ効率の向上を図る。
【解決手段】レーダクルーズコントロール制御によって車両に比較的大きな制動力が要求されているときには、運転者によってブレーキペダルが踏み込まれたときより小さな速度V2を置き換え車速Vchに設定し(S230)、車速Vが置き換え車速Vch以上のときには、要求制動トルクTr*の範囲内でモータを回生制御し(S150〜S170)、車速Vが置き換え車速Vch未満のときには、モータによる制動トルク(回生トルク)を油圧ブレーキによる制動力にスムーズに置き換える(S180,S190)。これにより、レーダクルーズコントロール制御中の車両のエネルギ効率を向上させることができる。
(もっと読む)
アンチスキッド制御装置
【課題】 ブレーキ非操作時におけるアンチスキッド制御の誤介入を防止し、運転者に与える違和感を低減したアンチスキッド制御装置を提供する。
【解決手段】 運転者のブレーキ操作を検出するブレーキスイッチと、モータ停止時の逆起電圧を検出する電圧検出手段とを有し、アンチスキッド制御手段は、ブレーキスイッチのOFF時にアンチスキッド制御を実行する場合、モータをONからOFFに切り換え、この切り換え時における逆起電圧が所定のしきい値よりも大きい場合、モータおよびソレノイドバルブの作動を停止するアンチスキッド誤介入防止制御を実行することとした。
(もっと読む)
障害物回避支援装置
【課題】車両の進路上に検出した障害物との接触の危険性が高いときに、障害物を操舵によって回避することができる可能性を向上させる障害物回避支援装置を提供する。
【解決手段】障害物検出手段101は、車両の進路上にある障害物を検出する。判断手段102は、障害物検出手段101が検出した障害物の位置に応じて、車両の前輪と後輪との制動力の配分を補正するか否かを判断する。制動力配分補正手段103は、判断手段102が車輪の前輪と後輪との制動力の配分を補正すると判断した場合、制動力の配分を前輪から後輪よりに補正する。
(もっと読む)
21 - 40 / 61
[ Back to top ]