
Fターム[3D301DA39]の内容
車体懸架装置 (72,824) | 構成要素 (13,859) | ダンパ、ショックアブソーバ (3,073) | 減衰係数調整 (622) | 4段以上、無段階 (168)
Fターム[3D301DA39]に分類される特許
1 - 20 / 168
旋回走行制御装置、旋回走行制御方法
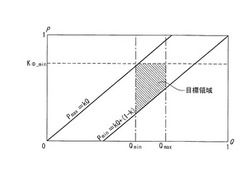
【課題】車高に比べてトレッド幅の狭い車両の旋回性能を改善する。
【解決手段】前後輪のロール剛性に対して制限値Kφminを設定する。そして、電動スタビライザ4F及び4Rを駆動制御し、前後輪のロール剛性を個別に調整することで、前後輪のロール剛性を制限値Kφminよりも大きくする。また、前輪における旋回内輪の輪荷重が0になる前後輪ロール剛性配分Pを上限値Pmax=a1Q+b1で定義し、前輪における旋回内輪の輪荷重が0になる前後輪ロール剛性配分Pを下限値Pmin=a2Q+b2で定義する。そして、前後輪ロール剛性配分Pが上限値Pmaxより小さく、且つ下限値Pminより大きくなるように、電動スタビライザ4F及び4Rを駆動制御して、前後輪のロール剛性を個別に調整する。
(もっと読む)
減衰力可変ダンパ

【課題】減衰力を簡単な制御で変えることが可能な減衰力可変ダンパを提供する。
【解決手段】減衰力可変ダンパ10は、上流体室31から仕切られた状態に設けられた圧電体56を備え、圧電体56に印加される電圧に対応させてバルブ手段62を流体通路78に向けて押圧する力を変えることが可能に構成されている。上流体室31の作動油圧が低くなるようにピストン組立体14が摺動した際に、上下の流体室31,32の作動油13の圧力差で、バルブ手段62を流体通路78から離間させて流体通路78を開放可能とした。一方、上流体室31の作動油圧が高くなるようにピストン組立体14が摺動した際に、高くなった作動油圧でバルブ手段62を流体通路78から離す方向に移動して流体通路78を開放可能とした。
(もっと読む)
サスペンション装置
【課題】操縦安定性と乗心地を向上させること。
【解決手段】車輪W毎に配設され、発生した振動を減衰係数に応じて減衰させるショックアブソーバ11及び当該減衰係数の調整が可能なアクチュエータ12を備えた減衰力可変装置と、車軸毎に配設され、ロールモーメントに抗するアンチロールモーメントを発生させることでロール剛性の調整が可能なアクティブスタビライザ20と、を備え、アクティブスタビライザ20には、車体がロール状態から水平状態に向けて戻るときに、そのロール状態でのロールモーメントによって車体が沈み込んでいた側の車輪Wに対して、この車輪Wを路面に押し付ける力を発生させること。
(もっと読む)
ダンパ装置
【課題】伸縮振動を現在していなくても、長さを伸ばすことが可能なダンパ装置を提供する。
【解決手段】シリンダ2の内部をピストン3で第1流体室2aおよび第2流体室2bに区画し減衰力を発生させるダンパ装置1において、一端がピストン3に連結され他端がシリンダ2の上端側の外部に延在し内部に第3流体室4aが設けられたピストンロッド4と、一端がシリンダ2の下端側に固定され他端が第3流体室4aに配置され軸方向に貫通する流体通路5aが設けられ第3流体室4aに対して振動すると吸引と吐出を繰り返すポンピングをするポンプロッド5と、その吐出の際に作動液12が流入して内圧が高くなる第1チャンバ8と、その吸引の際に作動液が流出して内圧が低くなる第2チャンバ9と、第2流体室2bと第1チャンバ8とで連通させた状態と連通させていない状態とを切り換える第1切換手段10とを有する。
(もっと読む)
車高調整装置
【課題】イグニッションスイッチIGがオフされているときの消費電力を低減可能な車高調整装置(車両)100を提供する。
【解決手段】車高調整を行う車高調整手段5と、イグニッションスイッチIGのオンで起動して、車高調整手段5による車高調整を制御する制御手段9とを有する車高調整装置100において、車体1の下部に設けられ、障害物と接触した場合に信号を制御手段9に出力する接触検知手段2を有し、制御手段9は、イグニッションスイッチIGのオフで停止し、停止後に接触検知手段2から信号が入力すると起動し、車高調整を制御した後に再び停止する。制御手段9は、イグニッションスイッチIGのオフによる直近の停止後に、信号が入力した入力回数を信号が入力して起動する度にカウントし、その直近の停止から入力回数が所定回数を超えるまでの経過時間が所定時間未満である場合に、故障検知フラグを発生させ記憶する。
(もっと読む)
電磁サスペンション
【課題】 車両に容易に適用することができる電磁サスペンションを提供する。
【解決手段】 ケーシング2の内部には軸方向に延びる平板状の可動子3を設ける。可動子3は、ヨーク4の両面に設けた永久磁石5を備える。電機子7は、ケーシング2に固定され、可動子3を厚さ方向で挟み込む複数の磁極8を備える。各磁極8にはコイル9を巻回する。可動子3は、転がり軸受からなる支持部材11,12によって電機子7に対して相対移動が許容される。可動子3の軸方向端部には、回転機構16を介してロッド13を取付ける。ロッド13は、ケーシング2に固定されたロッドガイド14を貫通してケーシング2の外部に突出する。
(もっと読む)
車両用電動ダンパ装置
【課題】車輪の上下運動を最適に減衰させて車両の乗り心地を向上させることができるとともに、早々に熱に変換されないで、しかも、常時回生させることができる車両用電動ダンパ装置とする。
【解決手段】車両用電動ダンパ装置は、車体に対する車輪の相対的な上下運動を回転運動に変換して電動モータ35L,35Rを回転させることにより上下運動を減衰させるようにし、また、車輪の上下運動を減衰させるための減衰力を電動モータが発生する。車両用電動ダンパ装置は、車輪が上下方向に変位する変位速度を算出する変位速度検出部と、変位速度に基づいて電動モータの目標駆動電流を設定する駆動電流設定部と、目標駆動電流に基づいて電動モータを駆動制御するモータ駆動部106L,106Rとを有している。
(もっと読む)
電磁緩衝器
【課題】ロータとボール螺子ナットの連結作業における作業効率を向上することができる電磁緩衝器を提供することである。
【解決手段】上記した目的を達成するため、本発明の課題解決手段は、ナット2に上記カップリング4を組み付けてカップリング組立体Cを形成し、当該カップリング組立体Cにロータ3に対向して周方向に傾斜する傾斜面4d,4eと設け、ロータ3に設けた爪3aの先端に傾斜面3b,3cを設け、上記傾斜面同士を突き合わせてカップリング組立体Cにおけるカップリング4の弾性歯4b,4b間にロータ側の爪3aの挿入を周方向に案内させた。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定速度における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43を備え、当該補正手段43は、緩衝器2の伸縮速度xが速度閾値Vp2を超えると当該伸縮速度xが0となるまでは、速度閾値Vp2と所定速度Vp1の差分βだけ速度増側へオフセットして発生減衰力を補正し、当該差分βから0までは発生減衰力を最小とするよう補正する。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定のダンパ速度閾値における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43を備える。
(もっと読む)
サスペンション装置
【課題】インパクトショックのばね上部材への伝達を効果的に低減することができ、かつ、経済的なサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両におけるばね上部材とばね下部材との間に介装されてばね上部材とばね下部材との相対移動を抑制する減衰力を発揮する緩衝器2と、当該緩衝器2における減衰力を調節可能な減衰力調整機構3と、当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、上記緩衝器2の収縮速度が所定の速度閾値α以上となるとともに、収縮速度の変化量が所定の速度変化量閾値β以上となると、当該緩衝器2の収縮側減衰力を最小とすることを特徴とする。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定のダンパ速度閾値における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43と、補正手段43における演算で使用する緩衝器2の伸縮速度を当該伸縮速度の変化に応じて補正する速度補正手段44を備えた。
(もっと読む)
減衰力可変ダンパの制御装置
【課題】バネ上が高い周波数で小さく振動するときにも振動を吸収するようにスカイフック制御することが可能な減衰力可変ダンパの制御装置を提供することを課題とする。
【解決手段】ダンパ1aのバネ上速度が高いほどダンパ1aの減衰力が高くなるように減衰力制御量を設定し、バネ上速度の方向とダンパ1aのストローク速度の方向が同方向の場合に、減衰力制御量に基づいて減衰力を制御するスカイフック制御を行う減衰力可変ダンパ1の制御装置20とする。そして、ストロークセンサ14が検出するストローク変位に基づいて算出されるダンパ1aの振幅が小さくなるにつれて、ダンパ1aの減衰力が低くなるように減衰力制御量を補正することを特徴とする。
(もっと読む)
車体姿勢制御装置
【課題】 車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができるようにした車体姿勢制御装置を提供する。
【解決手段】 車両走行時のタイヤが常用領域にある間は、ロールレイトに応じて目標ピッチレイトを算出するピッチ制御部23の方をロール抑制部18よりも優先させる。この場合、ピッチ制御部23で算出した目標減衰力に重みを与え、前記目標ピッチレイトとなるように各ダンパ6,9の減衰力特性を制御する。タイヤの路面グリップ状態が悪い限界領域では、ピッチ制御部23よりもロール抑制部18の方を優先させ、ロール抑制部18で算出した目標減衰力に重みを与える。これにより、ロール抑制制御量を大きくするように各ダンパ6,9の減衰力特性を制御する。
(もっと読む)
サスペンション制御装置
【課題】 輪荷重増減の応答性と絶対量を制御することができ、車両をより安全に運転制御することができるようにする。
【解決手段】 複数の車輪2,3のうち輪荷重を増加させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をハード側とし後期をソフト側に切替える縮み行程ハード・ソフト切替制御と、伸び行程中の初期をソフト側とし後期をハード側に切替える伸び行程ソフト・ハード切替制御とのいずれかを実行する。輪荷重を減少させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をソフト側とし後期をハード側に切替える縮み行程ソフト・ハード切替制御と、伸び行程中の初期をハード側とし後期をソフト側に切替える伸び行程ハード・ソフト切替制御とのいずれかを実行する。
(もっと読む)
サスペンション制御装置
【課題】 車両の横加速度に応じて車輪の輪荷重を制御し、車両の安定性を高めるようにする。
【解決手段】 車体1には横加速度Ayを検出する横加速度センサ12を設ける。横加速度センサ12は、検出信号をコントローラ14に入力する。コントローラ14は、横加速度Ayの増加中には、前輪2の輪荷重をアップする、またはダウンさせにくくするように、前輪側の減衰力可変ダンパ6の減衰力特性をハード側に設定し、後輪側の減衰力可変ダンパ6の減衰力特性をソフト側に設定する。また、コントローラ14は、横加速度Ayの減少中には、後輪3の輪荷重をアップする、またはダウンさせにくくするように、前輪側の減衰力可変ダンパ6の減衰力特性をソフト側に設定し、後輪側の減衰力可変ダンパ9の減衰力特性をハード側に設定する。
(もっと読む)
車両の統合制御装置
【課題】自動操舵機構の有する過渡時における応答性の問題を適切に補償して、通常走行時の快適性を保つことはもちろん、理想のハンドリング性能を実現する。
【解決手段】制御ユニット50の操舵制御部20では、ハンドル角θHd、ハンドル角速度(dθHd/dt)により目標舵角δtを算出し、モータ回転角θMを算出して、このモータ回転角θMを、ギヤ、モータの慣性等に起因する振動を抑制する為、所定のローパスフィルタによる処理や不感帯処理を行って、モータ駆動部21に出力する。サス_ECU40では、ハンドル角速度(dθHd/dt)に基づいて、減衰力補正基本値Cpを設定し、減衰力補正値Cを算出して、ストローク速度(dST/dt)、減衰力補正値Cを基に減衰力Faを設定し、所定のローパスフィルタによる処理等を行って出力する。
(もっと読む)
ショックアブソーバ装置
【課題】電磁式ショックアブソーバの減速機の慣性の影響で乗り心地が悪化することを抑制する。
【解決手段】フィルタ処理部51は、誘起電圧の周波数とゲインとの関係を設定した周波数ゲイン特性を記憶しており、周波数ゲイン特性を使って、電圧センサにより検出した実誘起電圧Voutをフィルタ処理する。電圧比較部53は、フィルタ処理部51から出力されたフィルタ誘起電圧Vxと三角波発生部52から出力された三角波電圧Vrとを比較し、フィルタ誘起電圧Vxが三角波電圧Vrより大きくなる期間においてハイレベル信号を出力する。PWM制御信号出力部54は、ハイレベル信号を入力している期間において、スイッチング素子SW1,SW2をオン状態とする。
(もっと読む)
車両用サスペンション制御装置
【課題】車体と車輪との間の上,下方向の相対速度が0付近で頻繁に変化する場合でも、車両の振動を緩衝することができ、振動や異音の発生を抑えることができる車両用サスペンション制御装置を提供する。
【解決手段】ばね上加速度センサ8、ばね下加速度センサ9、減算器13および積分器12によって、車体と車輪との間の上,下方向の相対速度V2を検出する。そして、検出された相対速度V2を、相対速度補正部15で補正し、補正相対速度V2ofsを出力する。ここで、相対速度補正部15は、相対速度V2が閾値K1よりも小さく閾値K2よりも大きい範囲では、補正相対速度V2ofsとして正負が反転しない値を出力する。これにより、発生減衰力がハードとソフトとの間でチャタリングを起こすように変化するのを防止する。
(もっと読む)
車両用ショックアブソーバ装置
【課題】 マイクロコンピュータを用いることなく簡易な構成で、ばね上部とばね下部との各上下振動を抑制できるようにする。
【解決手段】 抵抗値切替信号出力回路130は、第1抵抗回路121と第2抵抗回路122へ出力するスイッチ信号を使って、電磁式ショックアブソーバ30の減衰特性を変更する。抵抗値切替信号出力回路130は、ばね上アップ信号とばね下アップ信号を入力しているときは、伸長側と圧縮側とをミディアムに設定し、ばね上アップ信号とばね下ダウン信号を入力しているときは、伸長側をハード、圧縮側をソフトに設定し、ばね上ダウン信号とばね下アップ信号を入力しているときは、伸長側をソフト、圧縮側をハードに設定し、ばね上ダウン信号とばね下ダウン信号を入力しているときは、伸長側と圧縮側とをミディアムに設定する。
(もっと読む)
1 - 20 / 168
[ Back to top ]