
Fターム[3D301EA07]の内容
Fターム[3D301EA07]に分類される特許
1 - 18 / 18
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作のための情報を伝達すること。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者に入力される上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して運転者に伝達し、リスク伝達手段が、リスクポテンシャルの大きさに応じて、操作反力付与手段における反力を付与する。
(もっと読む)
制動力制御装置

【課題】
衝突の回避が不可と判断されて自動ブレーキが作動中に、路面の段差により車輪が路面から離れてしまうと輪荷重が減少して制動距離が長くなる。
【解決手段】
本制動力制御装置は、自車と障害物との相対距離及び相対速度を計測する第1のセンサと、路面の段差の上下変化状態及び自車と段差までの距離を計測する第2のセンサと、相対距離及び相対速度に基づいて、自車と障害物とが衝突するか否かを判断する衝突判断部と、上下変化状態及び段差までの距離に基づいて、自車が当該段差を通過する時のサスペンションの制御方向を判断する路面判断部と、ブレーキを制御するブレーキ制御部と、自車の車高を制御する車高制御部と、を備え、車高制御部は、ブレーキ制御部がブレーキを制御した際、車高を現在の車高よりも高く上げるよう制御し、路面に段差がある場合、当該段差の形状に基づいて当該車高の制御を変更する。
(もっと読む)
警報システム
【課題】車両用サスペンション装置に用いられるボールジョイントの作動不良を適切に予測して運転者に報知する警報システムを提供すること。
【解決手段】マイクロコンピュータ21は、走行距離センサ22から車両の総走行距離Lを入力し、規定距離La未満であるときに、車速センサ23からの車速V、操舵トルクセンサ25からの操舵トルクT、転舵角センサ24からの転舵角δに基づき転舵輪が据え切りされた据え切り回数N、転舵角δを積算した積算転舵角Kが必要積算転舵角Ka以上となる積算転舵回数Mまたはサスペンションストロークセンサ27からのストローク量hを積算した積算ストローク量Sが必要積算ストローク量Sa以上となる積算ストローク回数Pを設定する。そして、規定距離Laにて設定した回数N、Mまたは回数Pが規定回数未満であるときに、報知装置26を作動させてボールジョイントの作動不良を運転者に報知する。
(もっと読む)
隊列走行システム
【課題】隊列の全体の消費エネルギーを小さくすることができるようにする。
【解決手段】自車位置を検出する現在地検出部と、自車10の走行状態を表す車両情報を検出する車両情報検出部47と、周辺車両11からの周辺車両情報を取得する周辺車両情報取得処理手段と、自車位置、車両情報及び周辺車両情報に基づいて隊列を編成する隊列編成処理手段と、編成された隊列で隊列走行を行う隊列走行処理手段と、前方を走行する直近の周辺車両11の車両属性情報に基づいて、高さ調整装置49を作動させ、自車10の高さ変量を変更する高さ調整処理手段とを有する。自車10の高さ変量が変更されるので、自車10の前方を走行する直近の周辺車両11の投影面内に自車を置くことができる。自然風及び走行風によって自車が受ける風圧を低くすることができる。
(もっと読む)
車両制御装置、車両制御方法および車両制御プログラム
【課題】車両に生じる上下動を初期段階から継続して抑制し、乗り心地を向上させる車両制御装置、車両制御方法および車両制御プログラムを提供する。
【解決手段】起伏の開始点を示す起伏開始点情報を取得し、前記車両の上下動を示す上下動情報を取得し、前記車両が前記起伏の開始点に接近した場合に当該車両のサスペンションの減衰力を平坦路走行時より小さく設定し、前記起伏の開始点を通過した後に前記上下動情報に基づいて前記サスペンションの減衰力を設定する。
(もっと読む)
車両制御装置、車両制御方法及びコンピュータプログラム
【課題】段差の本来の役目を損なわせることなく運転者に安全走行させることが可能となった車両制御装置、車両制御方法及びコンピュータプログラムを提供する。
【解決手段】車両2が段差を通過したことを検出した際に、通過した段差の種類(『眠気覚まし段差』又はそれ以外の『通常の段差』)について識別し、検出した段差について段差の種類を含む段差情報を段差学習DB32に記憶することにより、段差の学習を行うとともに、走行中の車両2の前方に学習済みの眠気覚まし段差64が位置すると判定された場合には、サスペンション7A〜7Dの減衰特性をソフト設定に制御しないように構成する。
(もっと読む)
車両の挙動制御装置
【課題】車両の挙動を変更可能なアクチュエータを道路特性情報に応じた適切な制御タイミングで作動させる。
【解決手段】ナビゲーションECU11は、検出された自車両の現在位置と、記憶装置14に記憶されている進行先の凹凸路の開始位置間の距離が所定距離L0となった時点からの車両の走行距離L1を計算する。また、ECU11は、実際に走行した前後方向距離に対する距離の誤差の総和である自車位置のばらつき距離L3を計算し、アクチュエータ21eの作動応答遅れ時間T0内に車両が走行する距離である応答距離L4を計算する。そして、ECU11は、所定距離L0からばらつき距離L3および応答距離L4等を減算した値である残存距離L1*と、走行距離L1とを比較して、走行距離L1が残存距離L1*より大きくなったとき、アクチュエータ21eの事前制御開始情報をサスペンションECU23に供給する。
(もっと読む)
車輌の走行制御装置
【課題】車輌のステア特性の変化をできるだけ回避しつつ、タイヤの劣化の低減やタイヤ空気圧の更なる低下の抑制をできるだけ効果的に達成する。
【解決手段】タイヤ空気圧Pwtiがタイヤ空気圧低下率RPwtiに基づいて演算される基準値Pwteiよりも低いか否かの判別によりタイヤ空気圧が低下しているかが判別され(S20〜40)、何れかの車輪のタイヤ空気圧が低下しているときには、ナビゲーション装置60によりタイヤ空気圧の低下度合及び車輌が安全に停車できる位置に到達するための必要走行距離Lが演算され、必要走行距離Lに応じて制御ゲインKctが演算され(S100)、タイヤ空気圧が低下している車輪の接地荷重低減制御及び接地荷重の変更に起因する車輌のステア特性の変化を抑制するステアリングギヤ比制御の制御量が制御ゲインKctに応じて増減される(S200、300)。
(もっと読む)
車両制御システム
【課題】段差を通過する際に、車両の速度と上下方向加速度との関係を示す特性値が快適さの臨界値を示す快適境界線に近くなるようにサスペンション制御を行うことによって、乗り心地と走行安定性とを高い次元で両立させることができ、段差に対して適切にサスペンション制御を行うことができるようにする。
【解決手段】道路の段差の段差情報を記憶する記憶手段と、該記憶手段に記憶されている段差の段差情報に基づいて段差制御を行うとともに、車両の速度と上下方向加速度との関係を示す特性値が快適さの臨界値に応じて変化するように制御量を変化させる段差制御手段とを有する。
(もっと読む)
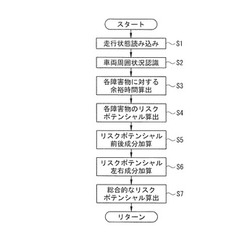
車両制御装置
【課題】車両の運転者による障害物への衝突回避操作による車両行動不安定化をより有効に抑制する。
【解決手段】車両Aに搭載され当該車両Aと当該車両Aに対する障害物Bとの相関情報である障害物情報を出力する障害物検出手段1、及び前記車両Aの運転者による前記障害物Bへの衝突回避操作による車両行動不安定化を前記障害物検出手段1の出力に基づいて自動的に抑制する車両行動自動安定化装置7を有する車両制御装置において、前記障害物検出手段1の出力に基づいて前記車両の運転者による前記障害物への衝突回避操作を推定する衝突回避操作推定手段9を備え、この衝突回避操作推定手段9の出力が、前記車両Aの運転者による前記障害物Bへの衝突回避操作とは独立して前記車両行動自動安定化装置7を作動させる。
(もっと読む)
車両用減衰力制御装置、車両用減衰力制御方法
【課題】 急制動を必要とする時の車両安定性を向上させて乗り心地を向上できる車両用減衰力制御装置等を提供する。
【解決手段】 車両に加わる振動を減衰させるショックアブソーバ3で発生する減衰力を調整するアクチュエータ2を制御するために、障害物認識装置9の認識結果によってブレーキ操作がなされる可能性を予測する機能と、ブレーキ操作がなされないことが予測された場合には、所定の減衰力を発生させるようにアクチュエータ2を制御する一方で、ブレーキ操作がなされる可能性が高いことが予測された場合には、当該ブレーキ操作がなされる前に、所定の減衰力よりも高い減衰力を発生させるようにアクチュエータ2の制御を開始する機能とをECU1に実装する。
(もっと読む)
鉄道車両
【課題】 作動時間遅れを発生させるための構成を有する遅延タイプのレベリングバルブを用いてハンチングの回避を可能としつつも、車体の高さや傾斜の調整を迅速に行うことができる鉄道車両を提供すること。
【解決手段】 鉄道車両1は、第1レベリングバルブが不感帯にある状態でも、第2レベリングバルブが空気バネに空気を給気する側に配設されているので、空気バネの高さ調整を迅速に行うことができる。
また、第1レベリングバルブに作動時間遅れを発生させるための構成を有する遅延タイプのレベリングバルブを用いても、第2レベリングバルブが空気バネに空気を給気することによって空気バネの高さ調整を行うことができるので、ハンチングの回避を可能としつつも、車体の高さ変化や傾斜の調整を迅速に行うことができる。
(もっと読む)
鉄道車両の車体傾斜制御装置
【課題】脱線時の新たな二次災害事故の発生又は事故被害の拡大を防止する。
【解決手段】車輪121と車軸122とを備える台車120と車体110との間に左右一対で設けられた空気バネ50L,50Rと、各空気バネに対して給排気を行う給排気手段と、軌道からの車輪の脱線状態を検出する脱線検出手段11L,11Rとを備え、脱線検出手段11L,11Rにより脱線状態の検出が行われると、左右一対の空気バネ50L,50Rに対して、一方が他方に対して高圧となるように給排気手段を制御する制御手段40を備え、建築限界Kをこえて隣接軌道側へ車体が大きく傾斜するのを防止し、通過する隣接車両との二次的衝突事故の発生を防止する。
(もっと読む)
鉄道車両の車体傾斜装置
【課題】 曲線路通過時の車体に傾斜を従来よりも大きくし、曲線路での通過速度を上げることができる鉄道車両の車体傾斜装置を提供する。
【解決手段】 車体2下の振子梁3と台車5との間に振子機構4を備え、台車5上で車体2を左右方向に揺動自在に支持するとともに、振子梁上3に左右の空気バネ11を介して車体2を載置してなる鉄道車両の車体傾斜装置において、空気バネ11を伸縮するための空気バネ駆動装置24・25および空気バネ11の高さを計測する空気バネ高さレベル装置26・27ならびに空気バネ駆動装置24・25を介して空気バネ11の高さを制御する空気バネ高さ制御装置21〜23を設け、曲線路通過時に空気バネ高さレベル装置によって計測される空気バネ高さに基づいて振子機構4により車体2が傾斜する方向へさらに車体2が傾斜するように空気バネ11の高さを制御できるようにした。
(もっと読む)
段差学習システム
【課題】段差エリアが検出された場合であっても、段差を学習するのに相応しくない状況においては学習しないようにして、車両の走行安定性や乗り心地が低下することがなく、段差に対して適切にサスペンション制御を行うことができるようにする。
【解決手段】道路の段差を検出する段差検出手段と、該段差検出手段が検出した段差エリアの段差情報を記憶する記憶手段と、車両の走行状況を判定する判定手段と、該判定手段による判定結果に基づいて、前記段差検出手段が検出した段差エリアの段差情報を前記記憶手段に選択的に記憶させる記憶処理手段とを有する。
(もっと読む)
段差学習システム
【課題】検出された複数の段差エリアを間隔が短い場合には結合して単一の段差エリアとし、また、段差エリアが検出された場合に同一地点判定を行って、同一地点についてのデータを再度記憶しないようにして、記憶容量を削減することができ、段差に対して適切にサスペンション制御を行うことができるようにする。
【解決手段】道路の段差を検出する段差検出手段と、該段差検出手段が検出した段差エリアの段差情報を記憶する記憶手段と、該記憶手段に記憶されている段差エリアの段差情報と、前記段差検出手段が検出した段差エリアの段差情報とを比較する比較手段と、該比較手段による比較結果に基づいて、前記段差検出手段が検出した段差エリアの段差情報を前記記憶手段に記憶させる記憶処理手段とを有する。
(もっと読む)
フォークリフトトラックの改良
【課題】 荷物を移動するためのフォークリフトトラックを提供する。
【解決手段】 本フォークリフトトラックは、荷物を支持するための荷重支持部材(3)を有し、トラックには、平坦度が様々に変化し又は水平な状態から逸脱した表面に沿ってトラックが移動するとき、荷重支持部材の垂直軸線を調節し、荷物を重力で引っ張る軸線と実質的に平行に維持するための手段(4、5、15、19)が設けられている。  (もっと読む)
(もっと読む)
車両状態解析システム、車両、及び車両状態管理システム
車両の状態を把握可能とする車両状態解析システムを提供すること。 最適な足回り状態とされた車両10を、例えば、直進等の所定の条件で一定時間走行させ、力センサー14の出力に関する情報を基準値として第1の記憶領域に記憶させる。車両10は、使用によりその状態が変化する場合があるため、適宜基準値を記憶したときと同様に車両10を所定の条件で走行させ、力センサーの出力に関する情報を第2の記憶領域に記憶させる。解析装置20は、第1の記憶領域に記憶された情報と、第2の記憶領域に記憶された情報とに基づいて、車両10の状態を解析することができる。例えば、車両10において、トー角、キャンバー角、タイヤの内圧等が変化すると、車輪から車体への力の入力が変化することになり、車両10の状態の変化を把握することが出来る。  (もっと読む)
(もっと読む)
1 - 18 / 18
[ Back to top ]