
Fターム[3D301EA15]の内容
Fターム[3D301EA15]に分類される特許
321 - 332 / 332
車両の機能作用グループのための電子制御システム

【課題】車両の機能作用グループの作動装置のための電子制御システムであって、管理対象の前記少なくとも1つの装置を作動及び作動解除させることのできる電子ギヤケースを備えている電子制御システムを提供する。
【解決手段】前記ギヤケースは、休止状態と定義される選択的動作の第1作動状態と、ブロック状態と定義される第2状態と、上記2つの状態の間の移動段階である移行状態と定義される第3状態と、を画定する。
(もっと読む)
車両操舵装置

【課題】 車輪の舵角を調整して走行安定性を向上させる技術を提案することを目的とする。
【解決手段】 各車輪に対応する位置の目標車高が横Gセンサの検出結果に基づいて算出される(S11)。そして、車高センサの検出結果から得られる各車輪に対応する位置の実車高および各車輪の目標車高に基づいて車輪舵角調整量が算出される(S12)。そして、車輪舵角調整量に基づいて車輪舵角調整アクチュエータの制御量が算出され(S13)、車輪舵角調整アクチュエータによって各車輪の舵角が調整される(S14)。このようにして車高に基づき車輪の舵角が調整され、走行安定性の向上が図られる。
(もっと読む)
懸架システム
【課題】自動車が被けん引車をけん引している状態において無理な車高調整が行われることを回避する。
【解決手段】車高調整装置を含む懸架システムにおいて、その懸架システムが搭載されている自動車が被けん引車をけん引していることをけん引検出部により検出してけん引情報を発生させ(S1)、そのけん引情報に応じて車高調整規制部により車高調整装置の作動を規制する(S2)。車高調整の規制は、車高調整の禁止,標準車高への強制復帰,標準車高より低い設定車高への強制移行,車高調整可能範囲の減縮,車高調整装置の作動速度の低減,車高調整装置の作動継続時間の短縮等により行う。さらに、けん引中であることを運転者に報知するとともに(S3)、駆動システム,ブレーキシステム,操舵システム等自動車の走行を制御するのに必要な各システムにけん引情報を供給する(S4)。
(もっと読む)
車高調整装置
【課題】 本発明の目的は、スペース効率のよい車高調整装置を提供することにある。
【解決手段】 本発明の車高調整装置は、サスペンション機構によって車体に支持された左右前後輪FR,FL,RR,RLと、前後輪の駆動トルクをそれぞれ独立して制御可能なトルク制御手段とを備え、前後輪のサスペンション機構の各瞬間回転中心Xf,Xrが前後輪の間に位置しており、トルク制御手段が、前輪と後輪との間に駆動トルク差を与えることで車体の車高を調整することを特徴としている。
(もっと読む)
車両制御装置
【課題】 車輪のジャイロモーメントに起因する車両振動を抑制する技術を提案することを目的とする。
【解決手段】 サスペンションのストローク速度、車輪の上方に位置するバネ上部材の速度、およびバネ上部材のロール方向の角速度がセンサによって検出され(S1〜S3)、それらの検出値に基づいて車輪のキャンバ角の角速度が推定される(S4)。そして、センサによって検出された車輪の走行回転角速度(S5)と、車輪のキャンバ角の角速度とに基づいて、キングピン軸回りのジャイロモーメントが推定される(S6)。推定されたジャイロモーメントに基づいて振動を抑制するための車輪制駆動力が算出され(S7)、対応するインホイールモータが制御される(S8、S9)。
(もっと読む)
車両用サスペンション装置
【課題】旋回中において、適切にトー角制御を行って安定した車両挙動を実現することができる車両用サスペンション装置を提供する。
【解決手段】車両が旋回中であるときに、ストロークセンサ12で検出した上下ストローク量に基づいて車輪のスリップ角αを算出し、スリップ角αによって発生するタイヤ横力を推定する。そして、このタイヤ横力が、スリップ角αが生じていないときのタイヤ横力となるように、各輪に対してトー角Δδを付加することにより、タイヤ横力変動を抑制する。
(もっと読む)
車両懸架システム
【課題】複数の車輪のうちの1輪以上ずつに対応する複数の車高を調整する車高調整装置を備えた車両懸架システムにおいて、複数の車輪のいずれかの接地状態が不十分になることを防止する。
【解決手段】目標車高が「高」に設定されている状態で(S1)、車高センサの検出値に基づいて、いずれかの懸架装置がフルリバウンド状態にあること(S3)、エア圧センサの検出値に基づいて、いずれかのエアばねのエア圧が設定値以下であること(S5)、車輪速センサの検出値に基づいて、左右駆動輪の車輪速差が設定値以上であること(S7)、トラクション制御中であること(S8)のいずれかが検出された場合に、接地状態が不十分である車輪が存在するとして、車両全体の車高を低下させる(S10)。
(もっと読む)
車両制動挙動安定装置
【課題】 車両挙動が不安定になった場合、例えば、後輪がロック状態になった場合に車両の姿勢を復元することを可能にした車両制動挙動安定装置を提供する。
【解決手段】 前輪2と後輪3を備えた車両1の制動時の挙動を安定させる装置であって、車両1の後部に回転自在に支持された補助輪5と、該補助輪5を制動時に路面に対して押圧する押圧機構4とを設ける。
(もっと読む)
車両用サスペンション制御装置
【課題】 車体質量状態に応じた減衰力制御を簡便に行い得る制御装置を提供する。
【解決手段】 車両用サスペンション制御装置70を、車体質量状態が標準状態である場合の減衰力変更アクチュエータ36の各々の制御目標値を車体質量状態に応じて補正することで、各アクチュエータの制御目標値を決定し、その決定した制御目標値に基づいて制御を行うように構成し、さらに、その補正に用いるための補正値として、車体剛体振動の減衰比が車体質量状態によらずに概ね一定となるような補正値であって各アクチュエータ36に対して共通する補正値を決定する手段82を備えさせる。車体を1つの剛体とみなして補正値を決定しているため、車体質量状態の変化に対応するための適切な補正値を、簡便に決定できることになる。また、その補正値が各アクチュエータ36についての補正に共通するものであることから、アクチュエータ36の制御自体も簡便となる。
(もっと読む)
車両転覆軽減の方法および装置
車両の転覆事象を検出する方法を提供する。車両の横運動エネルギが、車両縦速度および車両横滑り角に応答して判定される。車両の横加速度が、測定される。タイヤ垂直力が、測定される。転覆潜在力インデックスが、横運動エネルギおよび横加速度に応答して判定される。転覆インデックスが、横加速度の要因およびタイヤ垂直力の要因によって転覆潜在力インデックスに重みを付けることによって判定される。比較を行って、転覆インデックスが所定の閾値を超えるかどうかを判定する。 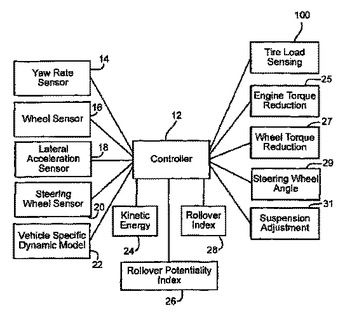 (もっと読む)
(もっと読む)
車両の走行推進力の制御方法、その方法を実施する装置とその用途
【課題】
車両の走行状態を任意の走行操縦にて所望状態に適合させること。
【解決手段】
この発明は、走行状態値の運転者指示値に対応する目標値(Ψ’ref )が走行状態値の検出された実際値(Ψ’)と比較されて、動揺モーメント分布が検出されて変更される車両の走行推進力を制御する方法に関する。この方法は、a.走行状態値の目標値(Ψ’ref )と走行状態値の実際値(Ψ’)との比較に基づいて車両の走行状態が決定され、b.所定の走行状態に依存して、予定走行状態に対応する新たな動揺モーメント分布が決定され、c.その新たな動揺モーメント分布が調整されることを実施される。さらに、この発明は、車両の前後車軸において動揺モーメント支持手段と車両の少なくとも一つの走行状態値(Ψ’)を検出するセンサーとを含む車両の走行推進力を制御する装置に関する。この装置は好ましくはヨーモーメントを補償するシステム(ESP)に使用され得る。  (もっと読む)
(もっと読む)
スタビライザ制御装置
減速機を介して動力伝達するスタビライザ制御装置において、減速機の伝達効率に影響されることなく、円滑且つ迅速に車体ロール運動の抑制を行なう。左右車輪間に配設される一対のスタビライザバー(SBfr,SBfl)と、これらの間に配設される電気モータ駆動のスタビライザアクチュエータ(FT)を具備したスタビライザ(SBf)に対し、電気モータMを車両の旋回状態に応じて制御してスタビライザのねじり剛性を制御する。更に、一対のスタビライザバーの相対位置を検出する(例えば、電気モータの回転角と減速比との関係から求める)相対位置検出手段を備え、その検出結果に応じて電気モータを制御する。 (もっと読む)
321 - 332 / 332
[ Back to top ]