
Fターム[3D301EB20]の内容
車体懸架装置 (72,824) | 制御対象 (5,102) | 機械的スタビライザ/イコライザ (419) | 取付位置/ストローク制御 (57)
Fターム[3D301EB20]に分類される特許
1 - 20 / 57
立体加速度値の重力細分化制御装置
【課題】 車両及び搭乗者に制止時以外の加速度が検出された場合に、その加速度に対し立体座標に於ける点対称となるように車両や座席の傾き及び高さを素早く調節することによって、搭乗者及び走行への危険性が増す状態を軽減もしくはなくすようにする立体加速度値の重力細分化制御装置を提供する。
【解決手段】 単体加速度センサーの高速な情報をXYZ軸の立体加速度値として算出し、その立体加速度値を基にダンパの加減圧を個別制御し車両や座席の高さや角度を常時変化させて、現在の走行状況もしくは予め登録している走行状況に於ける加速度を相殺する機能を搭載する基盤を設けた立体加速度値の重力細分化制御装置を特徴とする。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
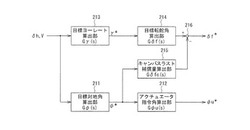
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法

【課題】旋回走行時に車体を旋回内側に傾動させる制御の精度を向上させる。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を算出し、旋回走行時における旋回外側へのロール運動分に相当する補償量φrを算出する。そして、目標対地傾斜角φ*及び補償量φrに応じて、駆動モータ3を駆動制御する。また、一次の応答遅れ特性をもつ車両モデル(Gy0(s))に従い、横加速度に応じて補償量φrを算出すると共に、車両モデル(Gy0(s))の時定数を、ロール等価粘性Cφとロール剛性Kφとの比に応じて決定する。また、車両モデル(Gy(s))に従い、運転者のステアリング操作及び車速に応じて、車体の横加速度を推定し、推定した横加速度に応じて補償量φrを算出する。
(もっと読む)
原動機付四輪車両
【課題】幅方向に一名しか収容できず、運転者の保護構造に統合されたシャーシと一体化した状態で作られた運転席、及びシャーシと二つの前車輪の同時傾斜により、水平との関係において傾斜した地面上及び/又はカーブ内で車両を平衡化させる手段を有し、四つの車輪を提供する。
【解決手段】四輪型原動機付車両1は、停止時及び低速時に自動的に介入する傾斜ブロック手段を有する。この車両は、停止時に車両が転倒しないような最大値に前記傾斜を制限するための手段を有している。車両は、幅が狭いので狭い場所を走行でき、また、狭い車体幅にもかかわらず、停止時、低速走行、高速度走行、カーブ内走行、段差内走行のいずれにおいても、安定を保つことができる。
(もっと読む)
車両の挙動制御装置
【課題】車輪に前後振動を与えることによる車輪の摩擦係数の増大効果を利用して、車両の制動停止距離を好適に短縮化する。
【解決手段】車輪の接地荷重を可変とし得るアクティブサスペンション機構400を備えた車両10において、ECU100は、アンチロック制御を実行する。当該制御においては、車両10が急制動状態にある場合に、アクティブサスペンション機構400により車両10に上下方向の振動が与えられる。一方、ECU100は、スリップ率SLが基準値を超えたタイミングと、車両振動が開始されたタイミングとに基づいて、タイヤμを最大とし得るピークスリップ率SLpkを推定するピークスリップ率SLpkが推定されると、ABS閾値がこのピークスリップ率SLpkに基づいて書き換えられる。
(もっと読む)
車両のローリング挙動制御装置
【課題】構成物の横変位により操舵時のローリング挙動を抑制する際、横変位の反作用によって、操舵に伴うローリング挙動が許容限界を超えることのないようにする。
【解決手段】ローリング制御用可動構成物の横変位量制御が開始されたとき、先ず車両状態検出部21で操舵角θ、車輪速ω、ヨーレートΦ、前後加速度αxT、横加速度αyT、およびモータ回転角φを検出する。次に、可動構成物変位量目標値算出部22で、上記の操舵角θおよび車輪速ωを用い、操舵周波数が高いほど小さくなるような可動構成物のローリング挙動変化抑制用目標横変位量を演算する。その後可動構成物駆動部23で、上記可動構成物の目標横変位量と、上記ヨーレートΦ、前後加速度αxT、横加速度αyT、およびモータ回転角φとから、可動構成物の目標横変位量を実現するのに必要なモータ駆動トルク指令値を算出し、これをモータ用サーボドライバへ出力する。
(もっと読む)
車両用サスペンションシステム
【課題】実用性の高い車両用サスペンションシステムを提供する。
【解決手段】(a)左右輪に対応して設けられ、それぞれが、基端部が車体に回転可能に保持され、先端部が車輪保持部材に連結され、車体車輪間距離の変化に伴なって揺動する1対のアーム48と、(b)それぞれが、各アームの基端部60に弾性体80を介して付設され、各アームの揺動に伴って基端部と共に回転する1対の歯車78とを備えたシステムにおいて、左右輪の車体車輪間距離が同じとなる状態において、1対の歯車の相対回転を許容することで弾性体を変形させずに1対のアームの揺動を許容し、左右輪の車体車輪間距離が異なる状態において、1対の歯車の相対回転を禁止することで弾性体を変形させつつその変形量に応じた弾性反力に抗って1対のアームの揺動を許容するように構成する。このように構成すれば、アームの基端部の回転を利用して、車体のロールを抑制できる。
(もっと読む)
サスペンション制御装置
【目的】プレビュー制御が行われるサスペンション制御装置において、旋回時に、プレビュー制御が良好に行われるようにすることである。
【解決手段】前輪側に設けられたばね上加速度センサ196Fによる検出値と、車高センサ198Fによる検出値とに基づいて、ばね下絶対速度を取得し、ばね下絶対速度と、プレビューゲインとで決まる減衰力が発生させられるように後輪側の上下方向力発生装置24Rのアクチュエータ124Rを制御する場合に、プレビューゲインを、前輪12Fのタイヤが通る路面と後輪12Rのタイヤが通る路面との重なりが少ない場合は多い場合より小さい値とする。その結果、旋回時にプレビュー制御が行われても、乗り心地が悪くなることを回避し、後輪の上下挙動を良好に抑制することが可能となる。
(もっと読む)
サスペンション制御装置
【目的】プレビュー制御が行われるサスペンション制御装置において、余裕時間が制御遅れで決まる設定時間より短い場合に、良好に上下方向の振動が抑制されるようにすることである。
【解決手段】前輪側に設けられたばね上加速度センサ196Fによる検出値と、車高センサ198Fによる検出値とに基づいて、ばね下絶対速度を取得し、ばね下絶対速度と、プレビューゲインとで決まる減衰力が発生させられるように後輪側の上下方向力発生装置24Rのアクチュエータ124Rを制御する場合に、その制御指令値が、車速VとホイールベースLWとで決まる余裕時間から制御遅れ時間を引いた待ち時間の経過後に出力される。この場合に、余裕時間が制御遅れ時間より短くなった場合には、車速が大きい場合は小さい場合よりプレビューゲインを小さい値とする。その結果、余裕時間が制御遅れ時間より短くなっても、乗り心地が悪くなることを回避し、後輪の上下挙動を良好に抑制することができる。
(もっと読む)
車両用サスペンションシステム
【課題】実用性の高い車両用サスペンションシステムを提供する。
【解決手段】4つの車輪に対応して設けられ、それぞれがモータ力に依拠してばね上部とばね下部とに接近離間力を発生させる4つの接近離間力発生装置を備えたシステムにおいて、4つの装置の各々が発生させる接近離間力を制御するために、その各々が発生させるべき接近離間力についての制御目標値を決定するとともに、制御目標値を低減させる必要が生じた場合に、4つの装置のうちの1つのものである対象装置の制御目標値(θ*T)を特定の低減規則(KS,KR,KP)に従って低減させ、そのときに、4つの装置のうちの対象装置以外のものである対象外装置の制御目標値(θ*)をも同じ低減規則(KS,KR,KP)に従って低減させる。このシステムによれば、制御目標値を低減させる際に、4つの装置の各々が発生させる接近離間力のバランスを適切に保つことが可能となる。
(もっと読む)
車両用サスペンション装置
【課題】 路面の凹凸から入力される衝撃的な荷重が、サスペンションアームを能動的に上下動させるアクチュエータの耐久性に悪影響を及ぼさないようにする。
【解決手段】 アクチュエータ27の出力回転軸を連結アーム24を介してサスペンションアームに連結し、出力回転軸の駆動力でサスペンションアームを上下動させるものにおいて、アクチュエータ27を出力回転軸の軸線L方向および軸線L直角方向に移動し得るように弾性支持部材33を介して取付ブラケット29にフローティング支持したので、路面から入力される衝撃的な荷重を弾性支持部材33で緩衝してアクチュエータ27に直接伝達されないようにし、アクチュエータ27の耐久性を高めることができる。このとき、連結アーム24のトーション部24aが捩じれ変形することで、弾性支持部材33の弾性変形による緩衝作用と相まって、アクチュエータ27の耐久性を一層高めることができる。
(もっと読む)
車輪―車体間距離制御装置
【課題】車輪から車体までの距離を制御する装置を利用する技術において、凸凹路や横傾斜路でも、車体の水平性を維持できるようにする。
【解決手段】車輪―車体間距離制御装置が、水平面に対する車体の横方向の傾きを検出し、検出した傾きを減少させるため、車両の右車輪1RRおよび左車輪1RRのうち、傾き検出手段が検出した傾きによって下になる側に取り付けられた車輪1RRから車体までの距離が、基準長よりも長くなるよう、アクチュエータを制御する。
(もっと読む)
車両駆動輪荷重制御装置
【課題】車輪の駆動輪にかかる荷重を制御することで、車両の発進時の駆動力を向上させるための新規な技術を提供する。
【解決手段】2つの駆動輪のうち一方の駆動輪の直下の路面の路面摩擦係数、および、他方の駆動輪の直下の路面の路面摩擦係数のうち、路面摩擦係数がより高い方を検出し、さらに、路面摩擦係数の低い方の路面の駆動輪1RRに制動トルクを付与するトラクション制御が作動していることを検出したとき、路面摩擦係数の高い方の路面上の駆動輪1RLの接地荷重を増加させる。
(もっと読む)
車両用サスペンションシステム
【課題】実用性の高い車両用サスペンションシステムを提供する。
【解決手段】サスペンションスプリングと、液圧式のアブソーバと、モータ力に依拠して自身の動作位置に応じて接近離間力を制御可能に変化させるアクチュエータを備える接近離間力発生装置とが、互いに並列的に配設されたシステムにおいて、接近離間力をばね上振動に対する減衰力として作用させる際に、ばね上絶対速度に応じて決定されるアクチュエータの目標動作位置((b)点線)を、その目標動作位置の変化速度が設定変化速度((b)1点鎖線)を超えないように変更する((b)実線)。このシステムによれば、例えば、目標動作位置の変化に対してアクチュエータの動作を追従させることが可能となり、アクチュエータの動作位置が目標動作位置に対して追従することができずに生じる弊害を解消することが可能となる。
(もっと読む)
車体傾斜制御方法及び装置
【課題】車体傾斜制御の応答性を高めつつ、空気の消費量を少なくする。
【解決手段】台車2上の幅方向左右側に設けられた空気ばね3a,3b及びその給排気手段と、対をなす空気ばね3a,3bの互いの中心を結ぶ直線と平行に、車体1に対して回転自在に取り付けられたトーションバー13aと、一方端部が回転自在にトーションバー13aの端部に取り付けられ、他方端部が台車2と回転自在に取り付けられるロッド13bを有するアンチローリング装置13と、アンチローリング装置13に設けられ、両ロッド13bの他方端部の高さ位置を変化可能なアクチュエータ14を有する。曲線走行時には、空気ばね3a,3bへの給排気による車体傾斜に加え、アクチュエータ14の駆動により両ロッド13bの他方端部の高さ位置を変化させる車体傾斜を合せて行う。
【効果】曲線通過時、車体傾斜制御の応答性がよくなり、空気の消費量も少なくなる。
(もっと読む)
サスペンション制御装置
【課題】サスペンション制御装置において、簡単な構造で消費エネルギを小さくする。
【解決手段】車両の左右のサスペンションユニット2を双方向油圧ポンプ3を介して互い接続する。コントローラ6により、横加速度センサ11、操舵角センサ12及び車高センサ17等によって検出した車両状態に基づいて、双方向油圧ポンプ3を駆動するモータ4を制御し、左右のサスペンションユニット2の間で油液を移送することにより、旋回時の車体のロールを抑制する。このとき、コントローラ6では、車高センサ17の検出に基づく制御信号に対してハイパスフィルタ処理を行う。これにより、乗員の乗降等に起因する積載荷重の変化による定常的な車体の傾きに対して、低周波の制御信号をカットすることができ、不要な姿勢制御が行われるの防止して消費エネルギを小さくすることができる。
(もっと読む)
アクティブスタビライザ装置およびその異常判定方法
【課題】アクティブスタビライザ装置においてスタビライザバーの折損を検出する。
【解決手段】スタビライザバー22R、22Lは、車両の車幅方向に延び両端に左右の車輪がそれぞれ連結されるバーを略中央部で分割した構造をなす。アクチュエータ30内部の回転電機では、スタビライザバー22R、22Lの一方がステータ側に接続され、他方がロータ側に接続されている。ECU100は、回転電機を作動させてスタビライザバー22R、22Lを相対回転させることで車体のロールを抑制する。逆起電力検出回路114は、回転電機に発生する逆起電力を検出する。車高差判定部は、ハイトセンサ110の出力に基づいて、左右の車輪近傍での車体下部と路面との距離の差である左右車高差があるか否かを判定する。折損判定部は、左右車高差があるにもかかわらず逆起電力が検知されない場合、スタビライザバー22R、22Lのいずれかが折損していると判定する。
(もっと読む)
減速機および車両用アクティブスタビライザー装置
【課題】 小型で大きな減速比を得ることができ、しかも減速比の変更が容易な減速機を提供する。
【解決手段】 回転自在なキャリヤ29と、キャリヤ29の偏心した支持孔29bに回転自在に嵌合するリングギヤ33と、リングギヤ33の第1、第2内歯33a、33bにそれぞれ噛合する第1、第2外歯34a、35aを有する第1、第2サンギヤ34,35とで減速機を構成し、キャリヤ29の回転を減速して第1、第2サンギヤ34,35の相対回転として出力するので、小型で部品点数の少ない構造でありながら大きな減速比を確保することができ、しかも第1、第2サンギヤ34,35の一方の外歯34a,35bの歯数を変更するだけの僅かな設計変更で減速比を変更できるので汎用性が高められる。
(もっと読む)
車両運動制御装置及び制御方法
【課題】車両統合制御においてμ利用率の上限を最小にするロール合成配分を求める。
【解決手段】前回演算されたロール剛性配分を用いて各輪タイヤの最大発生力を表す各輪摩擦円の大きさを求め、各輪摩擦円の大きさと前回演算された各輪利用率とを乗算して各輪の利用摩擦円の大きさを演算し、目標車体前後力、目標車体横力、及び目標ヨーモーメントを表す目標車体フォース及びモーメントと演算された利用摩擦円の大きさとに基づいて、各輪タイヤ発生力、各輪のμ利用率の上限値に対する割合を表す各輪利用率、及びロール剛性配分を演算し、演算された各輪タイヤ発生力及びロール剛性配分に基づいて、演算された各輪タイヤ発生力が得られるように車両運動を制御すると共に演算されたロール剛性配分が得られるようにサスペンションを制御する。
(もっと読む)
車両のロール剛性制御装置
【課題】前輪位置及び後輪位置の車両の横加速度を推定し、推定された横加速度に基づく制御量にて前輪位置及び後輪位置のロール剛性可変手段を制御することにより、車両の旋回運動の状況に拘らず車両のロール剛性の制御を最適に行う。
【解決手段】車両の重心に於ける実横加速度Gyaに基づき車両の目標ロール角φtが演算され(ステップ100)、車両のヨーレートγに基づく横加速度の修正量にて重心に於ける車両の横加速度が修正されることにより前輪位置及び後輪位置に於ける車両の横加速度Gyf及びGyrが演算され(ステップ200)、目標ロール角φtとそれぞれ車両の加速度Gyf及びGyrとに基づいて前輪位置及び後輪位置に於ける目標アンチロールモーメントMarft及びMarrtが演算され(ステップ250)、それぞれ目標アンチロールモーメントMarft及びMarrtに基づいてアクティブスタビライザ装置16及び18が制御される(ステップ300)。
(もっと読む)
1 - 20 / 57
[ Back to top ]