
Fターム[3D301EC08]の内容
車体懸架装置 (72,824) | 制御方式 (7,422) | 運動/振動/車両モデルの設定 (388) | スカイフック制御 (324)
Fターム[3D301EC08]の下位に属するFターム
ばね上速度に比例 (65)
ロール等にスカイフック制御(バウンスを除く) (6)
ばね下にスカイフック制御を適用 (19)
Fターム[3D301EC08]に分類される特許
1 - 20 / 234
減衰力調整式シリンダ装置
【課題】 異常を検出するときの誤検出を減らすことができる減衰力調整式シリンダ装置を提供する。
【解決手段】 減衰力可変ダンパ6は、台車3と車体2との間に連結される。減衰力可変ダンパ6には、減衰力特性を調整するアクチュエータ7が搭載されると共に、減衰力可変ダンパ6から車体2に作用する力を検出する力センサ12が内蔵されている。加速度センサ13は、車体2に設けられ、上,下方向の車体加速度を検出する。制御装置14は、正常状態と判定したときは、力センサ12と加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。一方、制御装置14は、センサ故障状態と判定したときは、力センサ12からの検出信号を用いずに、加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。
(もっと読む)
サスペンション制御装置

【課題】積分誤差のない速度に基づいて緩衝器の制御を行うことができるようにしたサスペンション制御装置を提供する。
【解決手段】GPSセンサ9は、GPS受信機8からのGPS信号を用いて垂直方向速度情報を演算する。コントローラ10の乗り心地制御部12は、GPSセンサ9からの垂直方向速度情報をばね上速度V1として用いることによって、乗り心地制御に基づく制御指令値を出力する。一方、コントローラ10のうねり抑制制御部14は、他のコントローラ16から出力される車両状態信号に基づいて、ピッチを抑制する制御指令値を出力する。指令値切換部15は、GPS受信機8の受信状態に応じて、乗り心地制御部12による制御指令値とうねり抑制制御部14による制御指令値とのうちいずれか一方を選択して出力する。
(もっと読む)
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsに基づいて、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分Vb0を算出する。続いて、算出した基準車体速成分Vb0に基づいて、サスペンションのストロ−ク速度Vzを算出する。そして、算出したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。それゆえ、例えば、車両平面運動成分や路面外乱成分が混入し、車輪速ωsの検出精度が低下しても、基準車体速成分Vb0の推定精度の低下を抑制できる。そのため、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
サスペンション装置
【課題】操縦安定性と乗心地を向上させること。
【解決手段】車輪W毎に配設され、発生した振動を減衰係数に応じて減衰させるショックアブソーバ11及び当該減衰係数の調整が可能なアクチュエータ12を備えた減衰力可変装置と、車軸毎に配設され、ロールモーメントに抗するアンチロールモーメントを発生させることでロール剛性の調整が可能なアクティブスタビライザ20と、を備え、アクティブスタビライザ20には、車体がロール状態から水平状態に向けて戻るときに、そのロール状態でのロールモーメントによって車体が沈み込んでいた側の車輪Wに対して、この車輪Wを路面に押し付ける力を発生させること。
(もっと読む)
サスペンション制御装置
【課題】特に、悪路を走行中、突起を乗り越えた際の乗り心地を改善するサスペンション制御装置を提供する。
【解決手段】本サスペンション制御装置のコントローラの制御方法では、悪路走行制御中に、突起乗り越し判定部により突起乗り越し判定が成立した場合でも、悪路走行制御を継続させる。これにより、車両が悪路を走行中に突起を乗り越した際、その減衰力特性が従来よりもソフト制御になるので乗り心地を改善することができる。
(もっと読む)
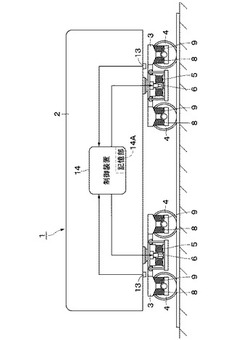
サスペンション制御装置
【課題】サスペンション制御装置において、発熱量及び消費電力を低減する。
【解決手段】鉄道車両1の車体2と台車3との間にコイルバネ5及び減衰力可変ダンパ6を介装する。加速度センサ10、11の検出に基づき、コントローラ12から制御電流を供給して減衰力可変ダンパ6の減衰力を調整することにより、車体2の振動を抑制する。減衰力可変ダンパ6を伸び側/縮み側の減衰力が制御電流に応じてハード/ソフト、ソフト/ソフト、ハード/ソフトとなる減衰力反転型とする。コントローラ12により、減衰力特性をソフト/ソフトに指令する際、ソフト/ソフトとなる制御電流の領域において、最小の電流値に近い省電力値を制御電流として減衰力可変ダンパ6に供給する。これにより、最小限の電流の供給により、ソフト/ソフトの減衰力特性を得ることでき、発熱量及び消費電力を低減することができる。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定速度における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43を備え、当該補正手段43は、緩衝器2の伸縮速度xが速度閾値Vp2を超えると当該伸縮速度xが0となるまでは、速度閾値Vp2と所定速度Vp1の差分βだけ速度増側へオフセットして発生減衰力を補正し、当該差分βから0までは発生減衰力を最小とするよう補正する。
(もっと読む)
サスペンション装置
【課題】 液圧ダンパ装置40のストッパ当たりの発生頻度が低減されたサスペンション装置を提供すること。
【解決手段】 サスペンション本体10に追従上限周波数を越える周波数の振動が入力されたときに、液圧ダンパ装置40とバウンドストッパ47との間の間隔Hが拡がるように電動アクチュエータ30が伸縮作動する。このため追従上限周波数よりも大きな周波数の振動によって液圧ダンパ装置40が電動アクチュエータ30に対して移動した場合でも、液圧ダンパ装置40とバウンドストッパ47との間の間隔Hが拡げられているので液圧ダンパ装置40がバウンドストッパ47に当たり難くなる。よって、ストッパ当たりの発生頻度が減少し、ストッパ当たりの発生による乗り心地の悪化が抑えられるとともに、バウンドストッパ47の耐久性も向上する。
(もっと読む)
サスペンション装置
【課題】 、電動アクチュエータのモータに供給する電力を変圧するDC/DCコンバータ等の変圧器の出力電圧(モータの駆動電圧)を所定の電圧以下の範囲でできるだけ高くすることができるサスペンション装置を提供すること
【解決手段】 DC/DCコンバータ30の出力電圧は、電力モニタ装置65により検出されて、その検出電圧が出力電圧取得部55に取得される。取得された出力電圧は、電動アクチュエータの作動状態を表す消費電力Wcomに応じて取得される変動電圧ΔVを差し引くことにより補正され、補正された補正電圧V1が基準電圧(47.5V)に近づくように、DC/DCコンバータ30の出力電圧が調整される。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定のダンパ速度閾値における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43を備える。
(もっと読む)
サスペンション装置
【課題】インパクトショックのばね上部材への伝達を効果的に低減することができ、かつ、経済的なサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両におけるばね上部材とばね下部材との間に介装されてばね上部材とばね下部材との相対移動を抑制する減衰力を発揮する緩衝器2と、当該緩衝器2における減衰力を調節可能な減衰力調整機構3と、当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、上記緩衝器2の収縮速度が所定の速度閾値α以上となるとともに、収縮速度の変化量が所定の速度変化量閾値β以上となると、当該緩衝器2の収縮側減衰力を最小とすることを特徴とする。
(もっと読む)
車両のサスペンション装置
【課題】 エアバネ装置と、アクティブ制御を行う電磁アクチュエータとを備えたサスペンション装置において、実車高hと目標車高h*とのずれを小さくして、乗り心地の低下を抑制する。
【解決手段】 車高偏差演算部121は、目標車高h*から実車高hを減算することで車高偏差Δhoを演算する。ローパスフィルタ処理部122は、車高偏差Δhoに含まれる高周波ノイズ成分を除去した車高偏差Δhを演算する。モータ力補正量演算部123は、車高偏差Δhに車高補償ゲインKhを乗じることによりモータ力補正量Δfhを演算する。目標モータ力補正演算部124は、目標モータ力演算部116から出力された目標モータ力fmotor*に、モータ力補正量演算部123から出力されたモータ力補正量Δfhを加算して、最終的な目標モータ力fmotor*を求める。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定のダンパ速度閾値における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43と、補正手段43における演算で使用する緩衝器2の伸縮速度を当該伸縮速度の変化に応じて補正する速度補正手段44を備えた。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供する。
【解決手段】目標減衰力の方向が緩衝器の伸縮方向と同じ方向である場合に対応して目標減衰力の変化に対して一定値をとる出力下限ラインA1と、目標減衰力の方向が緩衝器の伸縮方向が異なるものの出力上限を上回る場合に対応して目標減衰力の変化に対して一定値をとる出力上限ラインB1と、目標減衰力の方向が緩衝器の伸縮方向が異なり緩衝器が出力可能な場合に対応して目標減衰力に対して比例的に変化する出力可能ラインC1と、出力可能ラインと出力下限ラインとを、出力可能ラインと出力上限ラインとを接続する緩和ラインD1,E1とを備えたマップを用いて、緩衝器の減衰力を調節する減衰力調整機構へ与える目標電流指令値を求める。
(もっと読む)
車両のサスペンション装置
【課題】 電磁アクチュエータの電動モータ31の過熱を防止する。
【解決手段】 モータフリー制御部53は、モータ温度Tmが過熱防止開始温度Tmaを超えていると判断した場合には、相間開放用リレーユニット54の各リレーR1,R2,R3をオフ状態にする。これにより、電動モータ31の過熱が防止される。この場合、エアバネ制御部150は、給排装置80からエアバネ装置20に圧縮空気を供給して、エアチャンバ26の内圧を上昇させて、エアバネ装置20のバネ定数を増加させる。これにより、電動モータ31が減衰力を発生できなくても、ストッパ当たりが低減される。
(もっと読む)
サスペンション装置
【課題】操舵初期における車体のロールを充分に抑制でき、さらには、車体の左右の揺り返しを防止し、車両における乗り心地を向上させることができるサスペンション装置を提供することである。
【解決手段】緩衝器2nと、当該緩衝器2nにおける減衰力を調節可能な減衰力調整機構3と、当該減衰力調整機構を制御する制御装置4とを備えたサスペンション装置1において、車体Bの横加速度Gを検知する横加速度検知部5と、車体Bのロール角速度ωを検知するロール角速度検知部6と、操舵輪Sの舵角速度θを検知する舵角速度検知部7とを備え、制御装置4は、舵角速度θが所定の不感帯域を超えると、舵角速度θから求めた減衰力Fθと、横加速度Gから求めた減衰力FGと、ロール角速度ωから求めた減衰力Fωのうち、最大の減衰力を操舵初期加算減衰力とし、当該操舵初期加算減衰力を用いて緩衝器が発生すべき最終減衰力Dnを求めて緩衝器2nを制御する操舵初期制御を行う。
(もっと読む)
車両
【課題】1つの駆動源を用いて駆動タイヤとサスペンションのそれぞれを作動させることができる車両。
【解決手段】駆動源8と、駆動源8から出力される駆動力によって回転可能な駆動輪3と、駆動源8から出力される駆動力によって作動するサスペンション7と、駆動源8と、駆動輪3またはサスペンション7との接続を切り替える切替え手段23とを有する走行装置4を備える車両を提供する。
(もっと読む)
サスペンション装置
【課題】 エアバネ装置のバネ定数の振幅依存性による乗り心地の低下を良好に抑制し、かつ、電磁アクチュエータの振動や作動音の発生を低減する。
【解決手段】 エアバネ装置の小振幅振動時に、バネ上部材が上方向に動作している場合には電磁アクチュエータの制御量を増加補正し、バネ上部材が下方向に動作している場合には電磁アクチュエータの制御量を低減補正する。この場合、バネ上部材が上方向に動作している場合であっても、電磁アクチュエータが推進力を発生している状況であれば、電磁アクチュエータの制御量の増加補正を行わないようにする。また、バネ上部材が下方向に動作している場合であっても、電磁アクチュエータが減衰力を発生している状況であれば、電磁アクチュエータの制御量の低減補正を行わないようにする。
(もっと読む)
サスペンション装置
【課題】 悪路走行時にバネ下関連制御量の位相遅れを低減する。
【解決手段】 周期設定部170は、バネ下加速度センサ62の出力する検出信号G1の変化率の大きさ|G1’|が基準値Th1より大きく、かつ、バネ下上下加速度の大きさ|G1|が基準値Th2よりも大きいときに、悪路走行時であると判定して、バネ上減衰制御力演算部110の演算周期Tbを長くし、バネ下減衰制御力演算部120、慣性力演算部130、制振制御力演算部140、目標モータ力演算部150の演算周期Twを短くする。また、通信部160の通信周期Tsも短くする。これにより、マイクロコンピュータの高スペック化を図らなくても、慣性補償制御を適切に行うことができる。
(もっと読む)
サスペンション装置
【課題】悪路走行時であっても中間部材の慣性の影響を良好に低減して乗り心地を向上させる。
【解決手段】目標荷重設定ブロック110は、バネ上速度x2’とバネ下速度x1’とに基づいて車両を制振するために必要とされる減衰力を計算し、その減衰力を直列サブアブソーバで発生させる目標荷重freqに設定する。実荷重検出ブロック120は、直列サブアブソーバの変位量と変位速度から、直列サブアブソーバで発生した実荷重frealを演算により推定する。フィードバック制御ブロック130は、実荷重frealが目標荷重freqに追従するようにフィードバック演算式によりモータ制御量fmotorを計算する。これにより、悪路走行時であっても中間部材の慣性力の影響を良好に補償することができる。
(もっと読む)
1 - 20 / 234
[ Back to top ]