
Fターム[3D301EC53]の内容
Fターム[3D301EC53]の下位に属するFターム
ばね上速度推定/演算 (16)
ばね上ばね下相対速度推定/演算 (26)
Fターム[3D301EC53]に分類される特許
1 - 20 / 173
車両のロール角推定方法及び装置
【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を所望の精度で求めることが可能な方法及び装置の提供。
【解決手段】測定された第1及び第2の変位並びに第1及び第2の内圧値から、車両固有のロール剛性係数Kφ13を算出し、その後の任意の時点で測定された変位及び内圧値と上記算出したロール剛性係数Kφ13(Kφ13new)とに基づき、自動車高調整が行われなかった場合のロール角φ2esを求める。
(もっと読む)
車両のロール角推定方法及び装置

【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】車両に発生する加速度が予め設定された所定加速度以上である場合、更新禁止状態であると判定し、所定加速度未満である場合、更新禁止状態ではないと判定する。更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】旋回走行時に車体を旋回内側に傾動させる制御の精度を向上させる。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を算出し、旋回走行時における旋回外側へのロール運動分に相当する補償量φrを算出する。そして、目標対地傾斜角φ*及び補償量φrに応じて、駆動モータ3を駆動制御する。また、一次の応答遅れ特性をもつ車両モデル(Gy0(s))に従い、横加速度に応じて補償量φrを算出すると共に、車両モデル(Gy0(s))の時定数を、ロール等価粘性Cφとロール剛性Kφとの比に応じて決定する。また、車両モデル(Gy(s))に従い、運転者のステアリング操作及び車速に応じて、車体の横加速度を推定し、推定した横加速度に応じて補償量φrを算出する。
(もっと読む)
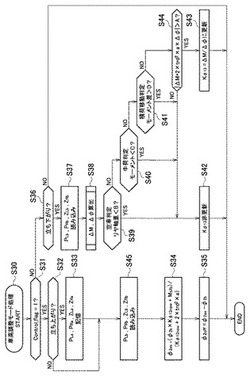
サスペンション制御装置及びサスペンション制御方法
【課題】ストローク速度が微低速域であっても車両姿勢をより精度良く制御可能とする。
【解決手段】車両の上屋挙動の検出値に基づき第1目標制御量A1を算出すると共に、車両の制駆動力から推定した上屋挙動に基づき第2目標制御量A2を算出する。その算出した第1目標制御量A1及び第2目標制御量算出手段に基づき最終目標制御量Aを算出する際に、上屋挙動が小さい場合、該上屋挙動が大きい場合に比べて第2目標制御量A2を優先して最終目標制御量Aを算出する。そして、その最終目標制御量Aに基づいて、サスペンションのストロークを制御可能なアクチュエータ15を駆動制御する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
車輪位置可変車両
【課題】 簡単な構成で、車両の利便性と車両の挙動安定性の向上を図るとともに、より自由な車両挙動を実現できる車輪位置可変車両を提供する。
【解決手段】 各車輪390に設けられ、車体100に対する車輪の向きを変更する転舵アクチュエータ340と、各車輪390と車体100との間にそれぞれ設けられ、各車輪390を所定の軌道(車輪ユニット移動軌道200)上の任意の位置に移動させるトレッド&ホイールベース変更アクチュエータ350と、走行状態に応じた目標ジオメトリに基づいて、トレッド&ホイールベース変更アクチュエータ350に対し車輪位置変更指令を出力するコントローラ500と、を備え、コントローラ500は、加速度方向側の車輪から重心位置までの距離を、加速度方向と反対側の車輪から重心位置までの距離に対して長くなるように設定する。
(もっと読む)
車高調整装置
【課題】車高を所望の範囲内に効率良く収めることが可能な車高調整装置の提供。
【解決手段】車高調整制御部は、左右のサスペンションのそれぞれについて、検出変位と検出内圧とロール剛性係数とを用いて、左右のエアサスペンションが共に目標変位に設定された車高調整完了状態での内圧を目標内圧(PLb,PRb)として算出し、検出内圧と検出変位とを乗算した検出乗算値(PL_now×ZL_now,PR_now×ZR_now)が、目標内圧と目標変位とを乗算した目標乗算値(PLb×Zb,PRb×Zb)に近づくように、電磁バルブを制御する。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角をアクチュエータの駆動力により調整可能な車両に対し、消費エネルギーを抑制しつつ、車輪のキャンバ角が所定角度から変化することを抑制できる車両用制御装置を提供する。
【解決手段】路面に所定値以上の凹凸が存在する場合には(S105:Yes)、その凹凸を通過する際に車両に大きなサスペンションストロークが生じ、その状態で外力が作用すると、車輪のキャンバ角が所定角度から変化する可能性がある。よって、この場合には(S105:Yes)、第2補正手段を実行することで(S121)、車両が凹凸を通過する前にキャンバ調整機構をサーボロック状態に設定しておく。その結果、外力の作用により車輪のキャンバ角が変化することをより確実に抑制することができる。
(もっと読む)
車両用制御装置
【課題】ホイール部材を回転させることで車輪のキャンバ角を調整可能な車両に対し、外力の作用によりホイール部材が初期位置から回転されることを抑制することができる車両用制御装置を提供する。
【解決手段】ホイール部材93aが外力の作用により初期位置から回転された際のキャンバ角調整装置の状態を履歴として記憶させる。よって、その履歴から傾向を把握することができるので、その傾向に基づいて、ホイール部材93aの初期位置を予め変更しておくことで、外力の作用によりホイール部材93aが初期位置から回転される確率を減らすことができる。その結果、補正手段によりホイール部材を回転させる頻度を少なくして、消費エネルギーの抑制を図ることができる。
(もっと読む)
車体振動制御装置、および車体振動制御方法
【課題】操舵操作を行ったときに、ロール挙動が増大することを抑制可能とすること。
【解決手段】車体のばね上挙動を構成する成分のうち、駆動トルクTwに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK1(>0)を乗算する。また、上下力Fzf、Fzrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK2(>0)を乗算する。さらに、旋回抵抗Fcf、Fcrに起因する成分である前輪荷重の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK3(<0)を乗算する。これにより、前輪荷重の変動を助長する方向の駆動トルクとする。そして、これらの乗算結果を合計し合計値を基にドライバ要求トルクを補正する。
(もっと読む)
車体すべり角推定装置および車両姿勢制御装置
【課題】車体の横すべり角を精度良く推定することのできる車体すべり角推定装置および車両姿勢制御装置を提供する。
【解決手段】車体すべり角推定装置4は、前輪31,32および後輪33,34が設けられた車体2の横すべり角を推定する。この車体すべり角推定装置4は、前輪31,32の舵角と、前輪31,32に対して作用する横力である前輪横力と、後輪33,34に対して作用する横力である後輪横力と、車体2の重心と前輪31,32の距離と、車体2の重心と後輪33,34の距離と、車体2のヨーレートと、車速とに基づいて、車体2の横すべり角を推定する。
(もっと読む)
車両状態量推定装置
【課題】車両の挙動制御時における挙動の急変を抑制することのできる車両状態量推定装置を提供すること。
【解決手段】車両1の挙動制御に用いる目標横加速度Gytを車両1の走行時における横加速度実測値Gysと横加速度推定値Gyeとに基づいて推定する車両状態量推定装置2において、横加速度実測値Gysと横加速度推定値Gyeとに基づいて目標横加速度Gytを推定する場合には、車両1の横滑りの状態に応じて横加速度実測値Gysと横加速度推定値Gyeとに重み付けを行うことにより推定すると共に、横滑りが所定値以上になった場合には横滑りの状態に関わらず横加速度実測値Gysの重み付けが大きい状態を維持し、横加速度実測値Gysと横加速度推定値Gyeとの差が所定値以下の状態が所定時間継続した場合に、横加速度実測値Gysの重み付けが大きい状態を解除する。
(もっと読む)
重心位置推定装置、車両、および重心位置推定方法、並びにプログラム
【課題】被牽引車の前後の重心の偏りに影響されることなく被牽引車の左右の重心の偏りを正しく推定することを自動的に実行する。
【解決手段】車両の偏り荷重値を所定のサンプリング周期毎に記憶する偏り荷重値記憶部28と、エアベローズ内の空気圧の変化に応じ、荷台への貨物の積載開始を判定すると共に、荷台への貨物の積載開始を判定したときからの空気圧の変化に応じ、荷台への貨物の積載完了を判定する偏り荷重値取得部29とを有し、偏り荷重値取得部29は、積載完了と判定した時刻とその所定期間前の時刻との間に偏り荷重値記憶部28に記憶された偏り荷重値のサンプリング値の平均値から積載開始と判定した時刻とその所定期間前の時刻との間に偏り荷重値記憶部28に記憶された偏り荷重値のサンプリング値の平均値を減算する左右重心位置推定装置20を構成する。
(もっと読む)
車両制御システムおよび制御装置
【課題】乗り心地と操縦安定性とを両立して向上させることができる車両制御システムおよび制御装置を提供する。
【解決手段】車両の振動を吸収するばね剛性を変更するばね剛性変更装置と、車両の振動を減衰する減衰量を可変可能な減衰量変更装置と、車両に発生する振動のうち路面入力による振動を推定する路面入力振動推定部と、振動のうちドライバ操作による振動を推定するドライバ操作振動推定部と、ばね剛性変更装置を制御して路面入力による振動を吸収させ、減衰量変更装置を制御してドライバ操作による振動を減衰させる制御部と、を備えることで上記課題を解決する。
(もっと読む)
サスペンション装置
【課題】 、電動アクチュエータのモータに供給する電力を変圧するDC/DCコンバータ等の変圧器の出力電圧(モータの駆動電圧)を所定の電圧以下の範囲でできるだけ高くすることができるサスペンション装置を提供すること
【解決手段】 DC/DCコンバータ30の出力電圧は、電力モニタ装置65により検出されて、その検出電圧が出力電圧取得部55に取得される。取得された出力電圧は、電動アクチュエータの作動状態を表す消費電力Wcomに応じて取得される変動電圧ΔVを差し引くことにより補正され、補正された補正電圧V1が基準電圧(47.5V)に近づくように、DC/DCコンバータ30の出力電圧が調整される。
(もっと読む)
サスペンション装置
【課題】 車両の静止時(イグニッションOFF時)にエアばね装置20内の気体が温度変化により収縮することによってアクチュエータ30がバウンドストッパ37に当接することが防止されたサスペンション装置を提供すること。
【解決手段】 車高補正部62は、車両の静止時(イグニッションOFF時)に、エアばね装置20内の気体の温度低下に伴うエアばね装置20内の空気の収縮によりアクチュエータ30が収縮することによりアクチュエータ30がバウンドストッパ37に当接しないように、上記空気の収縮により車高が変化する方向とは反対の方向に車高が変化するように、内部温度センサ27が検出した内部温度Tcと外部温度センサ70が検出した外気温度Tgとの差ΔTに基づいて、エアばね装置20内に封入された気体の容量を変化させることによりアクチュエータ30の基準長を補正して、車高を補正する。
(もっと読む)
車両
【課題】起動時には、車体の傾斜の変化速度が抑制されるような制御モードで車体の傾斜を制御することによって、起動時に傾斜状態から直立状態に復帰するように車体の姿勢が変化しても、乗員が不快に感じることがなく、乗り心地がよく、また、周辺の人員にも不安感を与えることがなく、安全性が高くなるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、操舵部に回転可能に取り付けられた車輪であって、車体を操舵する操舵輪と、駆動部に回転可能に取り付けられた車輪であって、車体を駆動する駆動輪と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、車体に作用する横加速度を検出する横加速度センサと、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、制御装置は、車両が起動されると、車体の傾斜を初期状態モードで制御する。
(もっと読む)
サスペンション制御装置
【課題】チャタリングの発生を抑制できるサスペンション制御装置を提供する。
【解決手段】車輪と車体との間に設けられ、車体の上下振動に対して減衰力を発生すると減衰力を変更可能なショックアブソーバと、車両のバネ下上下速度V1を検出するバネ下速度演算部12と、バネ下上下速度V1の包絡波形V1_envを逐次生成する逐次包絡波形生成部14と、包絡波形V1_envに基づいてショックアブソーバの目標減衰力F1を演算する目標減衰力演算部15と、を備える。
(もっと読む)
サスペンション装置
【課題】多数の要素の集合体で構成されているサスペンション装置のシステム全体としてのシステムバネ剛性を最適に発揮させることができるサスペンション装置を提供する。
【解決手段】車両の車輪2または車体9から伝達される振動を抑制する振動抑制手段、または車体9の高さを調整する車高調整手段の車体9への取付状態を調整して、サスペンション装置1aのシステム全体で発揮するシステムバネ剛性の制御を行うシステムバネ剛性制御手段5を備える。振動抑制手段、または車高調整手段は、車輪2側と車体9側との間に接続され、車輪2側と車体9側との相対移動を減衰させる減衰力を発生させるダンパ装置6であり、システムバネ剛性制御手段5は、ダンパ装置6の車輪2側または車体9側の取付部6a、6bに設けられ、ダンパ装置6の取付位置を移動させることによってシステムバネ剛性を制御する。
(もっと読む)
サスペンション制御装置
【課題】 車両の制動時に前輪側での輪荷重の抜けが発生するのを低減でき、制動距離の短縮化を図ることができるようにする。
【解決手段】 車両の制動時には、コントローラ17内に形成したアンチダイブ制御部19により減衰力特性をハードな状態に切換える制御を行う。制御指令演算部20では、ピッチレートセンサ16で検出されるピッチレートP(t)の変化量、即ち前輪荷重検出手段による輪荷重が減少してくると、アンチダイブ制御を行っている間であっても少なくとも伸び側の減衰力特性をソフト側に変更する制御を行う。ピッチレートP(t)の微分値dP/dtから車両のノーズダイブの終了時を判断し、アンチダイブ制御を解除することにより、車両の走行状態に応じたアンチダイブ制御を実行することができる。
(もっと読む)
1 - 20 / 173
[ Back to top ]