
Fターム[3D301EC54]の内容
Fターム[3D301EC54]に分類される特許
1 - 16 / 16
サスペンション制御装置
【課題】積分誤差のない速度に基づいて緩衝器の制御を行うことができるようにしたサスペンション制御装置を提供する。
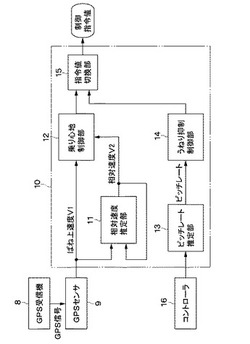
【解決手段】GPSセンサ9は、GPS受信機8からのGPS信号を用いて垂直方向速度情報を演算する。コントローラ10の乗り心地制御部12は、GPSセンサ9からの垂直方向速度情報をばね上速度V1として用いることによって、乗り心地制御に基づく制御指令値を出力する。一方、コントローラ10のうねり抑制制御部14は、他のコントローラ16から出力される車両状態信号に基づいて、ピッチを抑制する制御指令値を出力する。指令値切換部15は、GPS受信機8の受信状態に応じて、乗り心地制御部12による制御指令値とうねり抑制制御部14による制御指令値とのうちいずれか一方を選択して出力する。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置

【課題】車輪速から車両振動を推定する装置が、車体制振制御の対象となる車体振動の全てを推定し得るものでない場合でも、当該推定し得ない車体振動を求め得る方法を提供する。
【解決手段】演算部51,52で求めた前輪速VwF、後輪速VwRに基づき、演算部53では車体の上下バウンス速度dZv(F)を求め、演算部54では車体のピッチ角速度dθp(F)を算出し、車体振動のみを表す振動成分(上下バウンス速度dZvおよびピッチ角速度dθp)を抽出。車体振動状態量補完部26は、dZvおよびdθpを微分器26a,26bにより微分して上下バウンス量Zvおよびピッチ角θpを求め、上下バウンス速度dZv(F)およびピッチ角速度dθp(F)と、上下バウンス量Zvおよびピッチ角θpとを演算部27に向かわせ、車体振動を抑制するのに必要な制駆動トルク補正量ΔTdを、車体振動とレギュレータゲインKrとの乗算値の線形和として求める。
(もっと読む)
アクチュエータの作動制御装置
【課題】 プレビュー制御の制御性能の悪化が抑えられるアクチュエータの作動制御装置を提供すること。
【解決手段】 プレビューセンサ63によりセンサ距離z_ssrが検出されたときに検出の対象とされた路面位置を表すプレビュー位置Dpに基づいて、そのプレビュー位置Dpにおける路面変位量x_roadを記憶するためのデータ記憶位置iが演算される。そして、RAM54の記憶領域541のうち演算されたデータ記憶位置iにより表される記憶場所に路面変位量x_roadが記録される。
(もっと読む)
車両用状態推定装置、車両用状態推定方法、車両用懸架制御装置および自動車
【課題】サスペンションの状態推定をより高精度に行う。
【解決手段】車両用懸架制御装置1Aは、車両挙動予測部201と、車両挙動推定部202と、サスペンション制御部203とを備え、車両挙動予測部201で、車両に将来加わる予定の外乱(路面形状)に対する車両挙動を予測し、車両挙動推定部202において、この将来の車両挙動の予測結果を基に、その将来における車両挙動の推定に用いるカルマンフィルタのゲインを補正する。そして、車両挙動推定部202は、ゲインを補正したカルマンフィルタを用いて現在の車両挙動を推定し、サスペンション制御部203は、この推定結果に基づいて、能動型懸架装置の動作を制御する。
(もっと読む)
減衰力制御装置
【課題】ウェーバー・フェヒナーの法則に基づき、振動抑制感といった人間の感度を考慮した最適な補正を行い得る減衰力制御装置を提供する。
【解決手段】ショックアブソーバABの減衰力を制御する減衰制御手段CCと、少なくともばね上の上下方向の加速度及びばね上とばね下との間の相対変位を検出する検出手段DTと、その検出結果に基づき減衰力制御に供する減衰係数を演算する減衰係数演算手段CEとを備える。そして、検出手段DTの検出結果に基づき、ウェーバー・フェヒナーの法則の刺激増分に対応する体感加速度増分を演算する体感加速度増分演算手段WFと、その演算結果の体感加速度増分に応じて減衰係数を補正する補正手段MDを備える。
(もっと読む)
車両のサスペンション装置
【課題】 減衰力変更制御が路面からの振動を減衰することに対して追従できていない場合であっても、乗り心地の悪化を抑制できる車両のサスペンション装置を提供すること。
【解決手段】 サスペンションECU21は、バネ上加速度センサ22から入力したバネ上加速度xpb''を表す信号およびバネ下加速度センサ23から入力したバネ下加速度xpw''を表す信号を比較的高周波側の帯域にてバンドパスフィルタ処理する。そして、バンドパスフィルタ処理によって通過した最大信号振幅bと最大信号振幅aを取得する。次いで、ECU21は、最大信号振幅aに対する最大信号振幅bの比の値と予め「1」以下に設定された性能目標指数αとを比較し、b/aの値がαよりも大きいときは、制御追従性が悪化しているため、バネ上−バネ下相対速度Vが基準相対速度Vo以上のときの要求減衰力Freqを一定の要求減衰力Fconstに設定する。
(もっと読む)
状態推定装置、サスペンション制御装置及びサスペンションシステム
【課題】車両の運動状態の推定を精度高く行なうことができる状態推定装置、サスペンション制御装置及びサスペンションシステムを提供する。
【解決手段】車両2からのばね上速度(観測出力)と実車両モデル状態量推定用オブザーバ23の車両近似モデルからの推定ばね上速度(推定観測出力)との差に相当する出力偏差から、実減衰力推定用オブザーバ21の第1オブザーバゲインが動特性補償信号を算出し、実車両モデル状態量推定用オブザーバ23の第2オブザーバゲインが車両モデル補償信号を算出する。動特性補償信号は、実車両モデル状態量推定用オブザーバ23の動特性付与手段に入力され、動特性付与手段の設定内容の調整に用いられる。このため、制御上の時間遅れを発生が抑制され、良好な精度をもって振動抑制を行うことができる。
(もっと読む)
陸上車用多点油圧懸架システム
陸上車用多点油圧懸架システム(1)は、2以上の個別油圧アクチュエータ(3,5,7)を有する。これらの2以上のアクチュエータ(3,5,7)は、互いに対する位置決めのために、陸上車の被懸架構造と車輪ベースとの間にそれぞれ動作可能に配置される。加圧流体の共通供給部は所与の圧力を有し、入口及び出口を有する選択的に動作可能なポンプ(21)は、加圧流体の共通供給部の所与の圧力を増加させるためのもの。流体貯蔵器(35)は、ポンプの入口と選択的に流体連通する。制御可能な弁手段(31,33)は、弁手段(31,33)及びポンプ(21)を制御するための制御ユニット(41)に応じて、2以上のアクチュエータの各々を加圧流体の共通供給部と選択的に流体連通させるため、2以上のアクチュエータの各々と加圧流体の共通供給部との間に配置される。 (もっと読む)
サスペンション装置
【課題】経済性を損なわず緩衝器が発生している減衰力をモニタすることができるサスペンション装置を提供する。
【解決手段】サスペンション装置1は、シリンダ6内に摺動自在に挿入されるピストン7と、シリンダ6内に移動自在に挿入されてピストン7に連結されるロッド8と、シリンダ6内にピストン7で区画した流体が充填される二つの作動室R1,R2と、シリンダ6とロッド8の相対移動によって生じる流体の流れに抵抗を与える可変減衰弁3とを有し車両のバネ上部材Bとバネ下部材Wとの間に介装される緩衝器2と、可変減衰弁3を制御する制御装置4とを備え、減衰弁3が、流体が通過する流路の途中に設けた弁座15と、弁座15に遠近して流路抵抗を可変にする弁体16と、弁体16を弁座15に対して遠近させる磁歪素子18を有するアクチュエータ17とを備え、磁歪素子18を用いて検出する作動室R1内の圧力に基づいて可変減衰弁3を制御する。
(もっと読む)
車両用サスペンションシステム
【課題】 実用性の高い電磁式サスペンションシステムを提供する。
【解決手段】 電磁式のアクチュエータ30および連結装置32を備えたサスペンション装置において、連結装置を構成する液圧式ダンパ70に、それの減衰係数を変更するための減衰係数変更機構150を設け、アクチュエータの構造に起因して生じるばね上部側ユニットとばね下部側ユニットとのとの相対動作に対する抵抗、例えば、ねじロッド42とナット44との間に生じる摩擦力に基づいて、そのダンパの減衰係数を制御する。その抵抗の大きさが変動する場合におけるその変動の影響を排除あるいは緩和した特性のサスペンション装置を、アクチュエータ力ではなくダンパの減衰係数を制御することによって、実現することができる。
(もっと読む)
サスペンションの制御装置及び制御方法
【課題】運転者が要求する操縦安定性とその他の乗員が要求する乗り心地との両立を図る。
【解決手段】車体と各車輪との相対運動を抑制する減衰力を増減可能なダンパが設けられたサスペンションの制御装置において、車体の運動状態に基づいて目標減衰力を設定するスカイフック制御ベース値設定部61と、操作スイッチ15による乗員の指示操作、及び乗員の乗車状態を判別する乗車状態判別部67での判別結果の少なくとも一方に基づいて、操縦安定性及び乗り心地の要求度合いに関する車両特性を設定する車両特性設定部63と、この車両特性設定手段により設定された車両特性に応じて、減衰力設定手段により設定された目標減衰力を、車輪の各々に設けられたダンパごとに補正する減衰力補正部64と、を備えたものとする。
(もっと読む)
サスペンション制御装置
【課題】スカイフック制御等に用いる制御指令値の算出を精度高く行えて良好な制御の実現を達成できるサスペンション制御装置を提供する。
【解決手段】車体5の2箇所の対角部のばね上速度から車体5のワープwpを求め、車輪速から得られるピッチレイトptを前記ワープwpから減算することによりロールレイトrolを算出し、前記2箇所の対角部のうち一方の箇所のばね上速度及びロールレイトrolから車体5の4輪に対応した部分のばね上速度並びに各車輪2及び車体5の相対速度を得ており、スカイフック制御を実現できる。ばね上加速度センサ7を3個以上用いてスカイフック制御を行う従来技術に比して、装置構成を簡素化でき、ひいてはコストダウンを図ることができる。
(もっと読む)
車両のセミアクティブサスペンション、および車両の挙動抑制制御方法
【課題】車体の振動状態における振動モードも考慮することで、より目標とした車体の振動状態に近づくように車体振動を抑制制御可能にする。
【解決手段】各車輪と車体との間に介装された各輪のダンパの減衰力を、車体の振動状態を目標の振動状態とするために必要な目標減衰力に制御することで車両の挙動を抑制する。上記ダンパで発生可能な減衰力の向きと、対応する上記目標減衰力の向きとが反対方向の輪があると、上記車体の振動状態を構成する複数の振動モードの優先順位と、各輪のダンパで発生可能な減衰力の向きとに基づいて、各輪のダンパの目標減衰力を補正する。
(もっと読む)
ばね上速度推定装置
【課題】 簡便な手順を採りながら、ばね上速度の比較的高精度な推定を可能としたばね上速度推定装置を提供する。
【解決手段】 ばね上速度の推定を開始すると、ばね上速度推定部58は、ステップS11で、各上下Gセンサ13fl〜13rrの検出信号に基づき、各車輪3fl〜3frrのばね上速度ベース値VBfl〜VBrrをそれぞれ算出する。ばね上速度ベース値VBfl〜VBrrの算出を終えると、ばね上速度推定部58は、ステップS12〜S15で、各ばね上速度ベース値VBfl〜VBrrを高さとする4点BPfl〜BPrrを車両の周方向に沿って結んで4本の直線L1〜L4を得た後、これら4本の直線L1〜L4の各中点CP1〜CP4を含む平面Sを基準とする相互補間を行うことにより、各車輪3fl〜3frrにおけるばね上速度Vfl〜Vrrを算出する。
(もっと読む)
キャブマウント制御装置、キャブマウント制御方法、建設機械
【課題】 キャブにピッチングが生じた場合でも、操作性を良好に維持できるキャブマウント制御装置、キャブマウント制御方法、および建設機械を提供すること。
【解決手段】建設機械のキャブを4点支持する可変減衰キャブマウント30用のキャブマウント制御装置50を、キャブ3の状態変化を検出する加速度センサ51と、この状態変化検出手段51での検出結果に基づいてキャブ3のピッチング、ローリング、および上下方向の状態量を推定する状態量推定手段56と、この状態量推定手段56での推定結果に基づいて4つのキャブマウント30で生じさせる減衰力を演算する減衰力演算手段57とを備えて構成し、この減衰力演算手段57は、少なくともキャブ3が前後方向に振られる時に、キャブ3の前方側を支持する2つのキャブマウント30の減衰力を、後方側を支持する2つのキャブマウント30の減衰力よりも大きくなるように演算する。
(もっと読む)
システムの最適制御方法
【課題】エネルギ回生機能を有するシステムのエネルギ回生効果は、評価関数が2次形式でなくなるため、従来の最適制御理論を用いて最適制御則を求めることができなかった.またエネルギ回生評価項と性能評価項からなる評価関数を最小化するという認識がなかったため、制御則の導出は試行錯誤的に行われており、改善が望まれていた.
【解決手段】システムの方程式の一般解を部分積分し,その残余項をテイラー展開して1次近似する方法を用いて制御則を求め,これとReceding Horizon制御を組み合わせる方法を,エネルギ回生機能付きシステムの最適制御に適用し、従来の状態量フィードバック制御より優れた効果が得られることを明らかにした.
(もっと読む)
1 - 16 / 16
[ Back to top ]