
Fターム[3D301EC62]の内容
Fターム[3D301EC62]に分類される特許
1 - 20 / 221
サスペンション制御装置
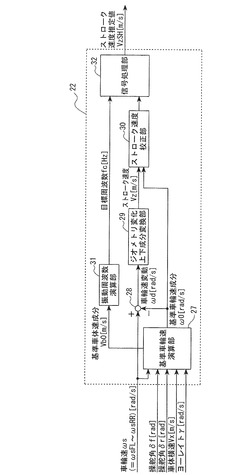
【課題】サスペンションのストローク速度の推定精度を向上可能とする。
【解決手段】制御装置(20)が、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分(Vb0)に基づいて目標周波数(fc)を設定する。続いて、制御装置20が、サスペンションのストローク速度(Vz)から目標周波数(fc)を含む周波数帯域の成分を除去する。また、制御装置20が、除去後のストローク速度(Vz)(ストローク速度推定値(VzSH))に基づいて、サスペンションのストローク状態を制御する。
(もっと読む)
車両のロール角推定方法及び装置

【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】車両に発生する加速度が予め設定された所定加速度以上である場合、更新禁止状態であると判定し、所定加速度未満である場合、更新禁止状態ではないと判定する。更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
サスペンション制御装置
【課題】 オーバーステアを軽減して、車両の安定性を高めるようにする。
【解決手段】 車体1には操舵角δを検出する操舵角センサ12と実ヨーレートrを検出するヨーレートセンサ13を設ける。コントローラ15は、操舵角δと実ヨーレートrに基づいて、車両がオーバーステアか否かを判断する。そして、コントローラ15は、車両がオーバーステア状態と判断した場合には、操舵角δに基づく目標ヨーレートr0と実ヨーレートrとの差分に応じて、後輪側の減衰力指令信号IRRを制御する。これにより、車両がオーバーステア状態となったときに、車体1の両後輪3のうち、縮み行程の減衰力をハードに、伸び行程の減衰力をソフトに調整する。
(もっと読む)
車両
【課題】車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び本体部を備える車体と、車体を操舵する操舵可能な操舵輪と、操舵不能な非操舵輪と、操舵指令情報を入力する操舵装置と、操舵部又は本体部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、操舵装置から入力された操舵指令情報に基づいて操舵輪の操舵角を変化させる操舵用アクチュエータ装置と、傾斜用アクチュエータ装置及び操舵用アクチュエータ装置を制御する制御装置とを有し、制御装置は、操舵初期に、操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させる。
(もっと読む)
サスペンション制御装置及びサスペンション制御方法
【課題】ストローク速度が微低速域であっても車両姿勢をより精度良く制御可能とする。
【解決手段】車両の上屋挙動の検出値に基づき第1目標制御量A1を算出すると共に、車両の制駆動力から推定した上屋挙動に基づき第2目標制御量A2を算出する。その算出した第1目標制御量A1及び第2目標制御量算出手段に基づき最終目標制御量Aを算出する際に、上屋挙動が小さい場合、該上屋挙動が大きい場合に比べて第2目標制御量A2を優先して最終目標制御量Aを算出する。そして、その最終目標制御量Aに基づいて、サスペンションのストロークを制御可能なアクチュエータ15を駆動制御する。
(もっと読む)
キャンバ制御装置
【課題】スプリット路上で車両を走行させたり、発進させたりする際に、車輪に付与されたキャンバによって車両の状態が不安定になることがないようにする。
【解決手段】車両のボディと、ボディに対して回転自在に配設された複数の車輪と、該各車輪のうちの所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両がスプリット路上にあるかどうかを判断するスプリット路判断処理手段と、スプリット路判断処理手段によって車両がスプリット路上にあると判断された場合に、キャンバ可変動作を変更するキャンバ可変動作変更処理手段とを有する。車両がスプリット路上にあると判断された場合に、車輪がキャンバが付与されている状態に保持されるか、キャンバが付与されていない状態に保持されるか、又はキャンバの付与動作若しくは解除動作が遅延させられるので、車両の状態が不安定になることがない。
(もっと読む)
車体姿勢制御装置
【課題】 車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができるようにした車体姿勢制御装置を提供する。
【解決手段】 車両走行時のタイヤが常用領域にある間は、ロールレイトに応じて目標ピッチレイトを算出するピッチ制御部23の方をロール抑制部18よりも優先させる。この場合、ピッチ制御部23で算出した目標減衰力に重みを与え、前記目標ピッチレイトとなるように各ダンパ6,9の減衰力特性を制御する。タイヤの路面グリップ状態が悪い限界領域では、ピッチ制御部23よりもロール抑制部18の方を優先させ、ロール抑制部18で算出した目標減衰力に重みを与える。これにより、ロール抑制制御量を大きくするように各ダンパ6,9の減衰力特性を制御する。
(もっと読む)
サスペンション制御装置
【課題】 輪荷重増減の応答性と絶対量を制御することができ、車両をより安全に運転制御することができるようにする。
【解決手段】 複数の車輪2,3のうち輪荷重を増加させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をハード側とし後期をソフト側に切替える縮み行程ハード・ソフト切替制御と、伸び行程中の初期をソフト側とし後期をハード側に切替える伸び行程ソフト・ハード切替制御とのいずれかを実行する。輪荷重を減少させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をソフト側とし後期をハード側に切替える縮み行程ソフト・ハード切替制御と、伸び行程中の初期をハード側とし後期をソフト側に切替える伸び行程ハード・ソフト切替制御とのいずれかを実行する。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】車輪速から車両振動を推定する装置が、車体制振制御の対象となる車体振動の全てを推定し得るものでない場合でも、当該推定し得ない車体振動を求め得る方法を提供する。
【解決手段】演算部51,52で求めた前輪速VwF、後輪速VwRに基づき、演算部53では車体の上下バウンス速度dZv(F)を求め、演算部54では車体のピッチ角速度dθp(F)を算出し、車体振動のみを表す振動成分(上下バウンス速度dZvおよびピッチ角速度dθp)を抽出。車体振動状態量補完部26は、dZvおよびdθpを微分器26a,26bにより微分して上下バウンス量Zvおよびピッチ角θpを求め、上下バウンス速度dZv(F)およびピッチ角速度dθp(F)と、上下バウンス量Zvおよびピッチ角θpとを演算部27に向かわせ、車体振動を抑制するのに必要な制駆動トルク補正量ΔTdを、車体振動とレギュレータゲインKrとの乗算値の線形和として求める。
(もっと読む)
キャンバ制御装置
【課題】車輪にキャンバを付与する際に運転者に違和感を与えることがないようにする。
【解決手段】車両のボディと、複数の車輪と、所定の左側及び右側の各車輪に配設された第1、第2のキャンバ可変機構と、キャンバ付与条件が成立したかどうかを判断するキャンバ付与条件成立判断処理手段と、キャンバ付与条件が成立したと判断された場合に、所定の左側及び右側の各車輪のキャンバ角を変更することによって前記各車輪にキャンバを付与するキャンバ付与処理手段とを有する。キャンバ付与処理手段は、第1、第2のキャンバ可変機構の作動中に、第1、第2のキャンバ可変機構による各車輪へのキャンバの付与状態を等しくするキャンバ付与状態調整処理手段を備える。キャンバの付与状態が左側の車輪と右側の車輪とで異なるのを抑制することができる。
(もっと読む)
車両
【課題】車体の安定を維持することができ、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、車体に作用する横加速度を直接的又は間接的に検出する2つのセンサと、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、制御装置は、2つのセンサが検出する横加速度に基づいて、旋回方向外向きの加速度におけるセンサの検出軸方向の加速度成分と、重力におけるセンサの検出軸方向の加速度成分との合成値を選択的に算出し、車体の傾斜を制御する。
(もっと読む)
サスペンション制御装置
【課題】 ばね上の振幅の大きさに応じて利得を調整して、フワフワ感とヒョコヒョコ感の抑制を両立させる。
【解決手段】 ばね上加速度センサ7と積分器10によって、ばね上速度ynを検出する。スケジューリングパラメータ演算器13は、ばね上速度ynの大きさに基づいてスケジューリングパラメータpを算出する。ゲインスケジュールドH∞制御器16は、ばね上速度ynとスケジューリングパラメータpとに基づいて、目標減衰力urの利得を調整する。これにより、フワフワ感とヒョコヒョコ感の抑制を両立させることができる。
(もっと読む)
車両用サスペンション制御装置
【課題】車体と車輪との間の上,下方向の相対速度が0付近で頻繁に変化する場合でも、車両の振動を緩衝することができ、振動や異音の発生を抑えることができる車両用サスペンション制御装置を提供する。
【解決手段】ばね上加速度センサ8、ばね下加速度センサ9、減算器13および積分器12によって、車体と車輪との間の上,下方向の相対速度V2を検出する。そして、検出された相対速度V2を、相対速度補正部15で補正し、補正相対速度V2ofsを出力する。ここで、相対速度補正部15は、相対速度V2が閾値K1よりも小さく閾値K2よりも大きい範囲では、補正相対速度V2ofsとして正負が反転しない値を出力する。これにより、発生減衰力がハードとソフトとの間でチャタリングを起こすように変化するのを防止する。
(もっと読む)
車両制御装置
【課題】車両の走行環境や運転指向をより的確に反映した挙動特性とすることによりドライバビリティを向上させる。
【解決手段】車両の走行状態に基づく指標を求め、前記指標に応じて前記車両の走行特性を変化させる車両制御装置において、前記車両を機敏に走行させる方向への前記指標の前記走行状態の変化に対する変化を、前記車両の走行の機敏さを低下させる方向への前記指標の前記走行状態の変化に対する変化よりも速くする指標設定手段を備える。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
減衰力制御装置
【課題】 電気モータの過大な発熱が抑えられるように、電気式ショックアブソーバの減衰力を制御すること。
【解決手段】 H式と、R式と、P式に、電気モータ40の発熱量の総和を表すQ式を加え、これらの4個の式に基づいて、電気モータ40の発熱量の総和が最小となるように各輪要求減衰力を演算する。このように演算された各輪要求減衰力に基づいて各電気式ショックアブソーバ30により発生される減衰力を制御する。これにより、電気モータ40の発熱量の総和が最小となり、電気モータ40の過大な発熱が抑えられる。
(もっと読む)
車両用ショックアブソーバ装置
【課題】 マイクロコンピュータを用いることなく簡易な構成で、ばね上部とばね下部との各上下振動を抑制できるようにする。
【解決手段】 抵抗値切替信号出力回路130は、第1抵抗回路121と第2抵抗回路122へ出力するスイッチ信号を使って、電磁式ショックアブソーバ30の減衰特性を変更する。抵抗値切替信号出力回路130は、ばね上アップ信号とばね下アップ信号を入力しているときは、伸長側と圧縮側とをミディアムに設定し、ばね上アップ信号とばね下ダウン信号を入力しているときは、伸長側をハード、圧縮側をソフトに設定し、ばね上ダウン信号とばね下アップ信号を入力しているときは、伸長側をソフト、圧縮側をハードに設定し、ばね上ダウン信号とばね下ダウン信号を入力しているときは、伸長側と圧縮側とをミディアムに設定する。
(もっと読む)
車両用サスペンション制御装置
【課題】 ストローク感の維持とダンピングの向上を両立させるようにする。
【解決手段】 ばね上加速度センサ8と積分器11によって、ばね上速度V1を検出する。ばね上加速度センサ8、ばね下加速度センサ9、減算器13および積分器12によって、車体1と車輪2との間の相対速度V2を検出する。ゲインマップ14は、ばね上速度V1に応じた目標減衰力DFを出力する。このゲインマップ14は、非線形ゲインKを有し、ばね上速度V1の大きさがしきい値Vtよりも大きいときには、しきい値Vtよりも小さいときに比べて、目標減衰力DFのゲインを大きくする。減衰力マップ15は、目標減衰力DFおよび相対速度V2に基づいて電流指令値を求める。これにより、ばね上速度V1に応じて目標減衰力DFのゲインを変化させて、ストローク感の維持とダンピングの向上を両立させることができる。
(もっと読む)
サスペンション制御装置診断方法
【課題】フィードバック制御手段を含むシステムの健全性を診断することができるサスペンション制御装置診断方法を提供する。
【解決手段】油圧ダンパ7の減衰係数を「高」、「低」とした状態で夫々、フィードバック制御で用いられる目標値(加振指令)を所定パターン(正弦波)で変化させて(ステップS3)、各状態における推力指令値StBを計測し(ステップS5、S11)、減衰係数高時、低時最大推力指令値StC、StDを求め(ステップS7、S13)、絶対値|StD−StC|を所定の判定値と比較して動作診断を行う(ステップS17)。
(もっと読む)
車両用制御装置
【課題】車両の旋回安定性を確保できる車両用制御装置を提供すること。
【解決手段】車両がアンダーステア状態にあると判断され、かつ、制動力判断手段により車両に加わる制動力が所定の条件を満たすと判断される場合に、キャンバ角調整装置を作動させて少なくとも後輪の旋回外輪にネガティブキャンバを付与するキャンバ付与手段を備えているので、車両がアンダーステア状態で旋回しているときに所定の大きさの制動力が加わると、車両の荷重がフロントに移動して車両が回頭し易くなるが、後輪の旋回外輪にネガティブキャンバが付与されることで、車両が回頭しようとする力に抗するキャンバスラストを後輪の旋回外輪に発生させることができる。その結果、安定したアンダーステア状態で車両を旋回させることができ、車両の挙動を安定化させて車両の旋回安定性を確保できる。
(もっと読む)
1 - 20 / 221
[ Back to top ]