
Fターム[3E080CF14]の内容
瓶の密封 (786) | 密封方法(共通の細部) (104) | 容器の回転を防止する手段を持つもの (28)
Fターム[3E080CF14]の下位に属するFターム
容器の側部を押さえるもの (8)
容器のフランジを押さえるもの (11)
Fターム[3E080CF14]に分類される特許
1 - 9 / 9
容器およびキャップ取付方法
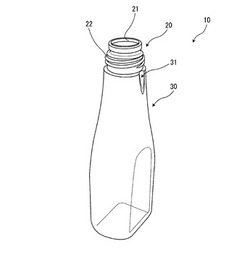
【課題】
本発明は、合成樹脂製の容器、およびその容器へのキャップ取付方法に関し、容器の軽量化とキャップの締付力の維持との両立を図る。
【解決手段】
合成樹脂製の容器10であって、内容物が押し出される押出口21を有しその押出口21を上に向けたときの上部に設けられた、外周を周回する雄ネジ22が形成された首部20と、押出口21を上に向けたときの首部20の下部に設けられた、内容物を収容する可撓性の容器本体30とを有し、容器本体30が、首部20に隣接した位置に、容器本体30の内面を隆起させて外面が陥没した陥没部31を有する。
(もっと読む)
施蓋装置

【課題】 施蓋時の作業環境や、ボトル容器や中栓の製造公差に影響されることなく、中栓の分離部にオーバーキャップから余分な力が加えられることがなく、しかも、購入者の手による巻締めで中栓を簡単に開封することができるように、オーバーキャップをボトル容器に巻締めることを可能にする施蓋方法と施蓋装置を提供する。
【解決手段】
オーバーキャップ2bを開封前巻締め状態に施蓋する作業時に、巻締め量規制手段30のストッパ31を、巻締められるオーバーキャップ2bから中栓2aへ過剰な荷重が伝達されることのないオーバーキャップ2bの下限高さ位置において、前記オーバーキャップ2bの螺進経路上に進入させる。
(もっと読む)
キャッパ
【課題】キャッピングヘッド46を昇降させずにキャップ16を受け渡すことを可能にして、キャッパ6の構成を簡素化する。
【解決手段】回転体10に設けられたネックグリッパ14によって容器2を保持して搬送するとともに、各容器2の上方にキャッピングヘッド46を配置し、シュート18から一列で供給されてきたキャップ16をキャッピングヘッド46に保持させて容器2にキャッピングを行う。シュート18の先端に連続してキャップガイド104を配置する。キャップガイド104は、キャッピングヘッド46の移動経路の下方に配置されており下流側に向かって次第に上昇する。キャップ取り出し手段58によってシュート18からキャップ16を取り出してキャップガイド104上を移動させると、キャップ16が次第に上昇して上方を水平に移動しているキャッピングヘッド46に保持される。
(もっと読む)
容器、特にボトルをねじ式で施栓するための方法および装置
【課題】容器、特にボトルをねじ式で施栓するための新規な方法および装置を提供すること。
【解決手段】本発明による方法によれば、閉鎖キャップのそれぞれをピックアップするためのピッキング段階および/または閉鎖キャップをねじ付けるためのねじ付け段階において、閉鎖ヘッドを昇降させるための直線駆動システムの電力消費量が測定されて、電力消費量の少なくとも1つの特性値と比較されることにより、間近の、または生じた不正確な閉鎖が検出されることによって、容器を低いエラー率で閉鎖することができ、また、場合により、不正確に閉鎖された容器を低いエラー率で連続する製品流れから排出することができる。
(もっと読む)
非接触式トルク発生を伴う容器の閉蓋装置
【課題】無菌チャンバが内部に形成された筐体と、筐体内に配置され、既定の軸の周りに回転する処理部材であって、筐体内に設けられたキャリアに配置される処理部材と、処理部材を駆動する駆動デバイスであって、少なくとも部分的に無菌チャンバ外に配置された駆動デバイスとを備える容器の処理装置を提供する。
【解決手段】駆動デバイスは、無菌チャンバ4外に配置され、回転動作を発生させる第1の駆動部材22を少なくとも含み、処理部材6はトルクを伝達する第2の駆動部材24に結合される。第2の駆動部材は、無菌チャンバ内に配置されて既定の第2の回転軸の周りを回転し、第1の駆動部材および第2の駆動部材は、処理部材の回転動作を発生させるために非接触的に共働し、少なくとも1つの壁部により互いに分離される。駆動部材は、少なくとも1つの磁化可能部材を有し、少なくとも第2の駆動部材は、無菌チャンバに対して回転軸方向に変位可能である。
(もっと読む)
混合・注入装置及びその容器
【課題】本発明は、ユーザの作業の必要性なしに、混合・注入作業を実行するための混合・注入装置と、そのような装置に使用するための容器とを提供する。
【解決手段】混合及び注入操作におけるコンピュータ制御処理用の混合・注入装置が、容器を把持することのできる回転可能なアームを含んでいて、そのアームは自動化された運動及び注入プロセスを実行するために、プログラム化可能な速度と時間間隔で回転可能である。本発明はさらに、キャップと容器との位置決め装置を提供していて、その位置決め装置は、容器を所定位置にしっかりとロックし、かつ容器にキャップを取りつける際はいつでも、キャップを容器に対して同一位置に再整列する。一つの実施の形態において、キャップと容器との両方がフランジを有していて、キャップが容器に正しく取りつけられるとそのフランジは整列する。
(もっと読む)
容器を搬送するための装置
【課題】取付金具の短時間交換を可能にし、同時に安全作業を可能にする容器搬送装置を提供する。
【解決手段】容器を搬送するための装置において、少なくとも2つの弓形部材2a,2bからなり、所定の幾何学回転軸のまわりに回転できるように配置され、且つ複数の開口8aを有し、その外周上に、搬送する容器を受けるための複数の凹部4を有する搬送体2と、搬送体2を保持するための複数の保持体12と、を備え、保持体12の延在方向が、搬送体2の平面に対して0°以外の角度で延在し、保持体12のそれぞれの少なくとも1つの係合領域12aが、いずれの場合も開口8aのうちの1つの開口内に配置される。開口8aのうちの少なくとも幾つかの断面は、開口8a内に配置される保持体12の係合領域12aの断面より大きく、弓形部材2a,2bは、回転軸と垂直な方向に保持体12に対して少なくとも時々移動可能になる。
(もっと読む)
容器用の充填及び密閉装置
本発明は、容器(6)用の充填及び密閉装置に関し、第1のロボットアーム(11)を備える第1の処理ステーション(1)、第2のロボットアーム(21)を備える第2の処理ステーション(2)、及び定位置の第1のプロセスステーション(4)を含んでおり、第1のロボットアーム(11)は、容器(6)を定位置の第1のプロセスステーション(4)へ搬送するようになっており、第2のロボットアーム(21)は、容器(6)を第1のプロセスステーション(4)から後続の1つのステーション(7)へ搬送するようになっており、定位置の第1のプロセスステーション(4)において少なくとも1つのプロセス工程を実施するようになっている。 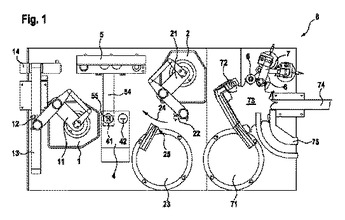 (もっと読む)
(もっと読む)
容器のクロージャ、及びクロージャの取付け及び取外し装置
【課題】 診断用分析器のような分析器で使用される容器のクロージャ、及びクロージャの取外し及び取付け装置を提供すること。
【解決手段】 容器用のクロージャが:(a)第一及び第二端部を有し、また空間を形成する内側円筒状壁と;(b)内側円筒状壁の反対側の外側円筒状壁であって、第一及び第二端部を有してクロージャの外側表面を形成する外側円筒状壁と;(c)第一端部を横切って延在する第一端壁であって、少なくとも部分的に前記空間内に延びる陥凹部と、陥凹部に配設された第一の組のねじ山とを具備する第一端壁と;を含む。容器のクロージャの取外し及び取付け装置が:ねじ付き陥凹部を有するクロージャにねじり進むようにされ、またクロージャを取り外すために回転力を加えるようにされたねじ付き回転スピンドルと;クロージャに係合して回転力をクロージャに加えるようにされた要素を有するクラッチと;を含む。
(もっと読む)
1 - 9 / 9
[ Back to top ]