
Fターム[3F022NN22]の内容
Fターム[3F022NN22]に分類される特許
1 - 20 / 27
物品搬送装置
【課題】左右駆動用モータの回生電力を有効に活用できる物品搬送装置を提供すること。
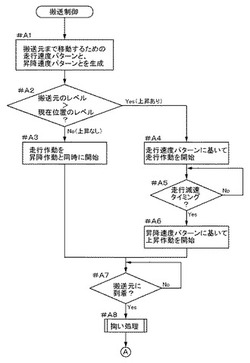
【解決手段】上下駆動用モータ及び左右駆動用モータの一方にて発生する回生電力を回収して他方に供給自在な回生電力回収供給手段が設けられ、左右移動制御部が左右速度パターンの左右減速期間により与えられる速度変化に従って移動体を減速させる期間と、上下移動制御部が上下速度パターンにより与えられる速度変化に従って移動体を上昇させる期間とが重複するように、上下速度パターンを決定するとともに移動体の移動を開始させた移動開始タイミングよりも遅延時間だけ遅い上昇開始タイミングに移動体の上昇を開始させる物品搬送装置。
(もっと読む)
物品搬送設備

【課題】搬送装置の搬送作動時にサーボ制御される電動モータを停止状態にて制動するときの電力の低減を図ることができながら、必要な搬送能力を維持することができる物品搬送設備を提供すること。
【解決手段】電動モータを制動する制動状態と制動を解除する解除状態に切換自在で、電力供給時に解除状態に、非供給時に制動状態に切り換える制動手段と、高負荷状態か低負荷状態かを判別する負荷状態判別手段とが設けられ、制御手段が、高負荷状態において、電動モータを停止状態に維持するときは、制動手段を解除状態にしかつ駆動制御手段によるサーボロックにて電動モータの回転作動を制動し、低負荷状態において、電動モータを停止状態に維持するときは、駆動制御手段による電動モータのサーボ制御を中断しかつ制動手段を制動状態に切り換えることで電動モータの回転作動を制動する物品搬送設備。
(もっと読む)
スタッカクレーン
【課題】走行作動と昇降作動とのそれぞれで適切な省電力化を図ることができるスタッカクレーンを提供すること。
【解決手段】制御手段が、走行台車が定格走行速度で走行し、かつ、昇降台が定格昇降速度で昇降するように搬送制御を実行する定格運転モードと、走行台車が、走行作動に関して省電力に適した省電力運転用走行速度で走行し、かつ、昇降台が、昇降作動に関して省電力に適した省電力運転用昇降速度で昇降するように、搬送制御を実行する省電力運転モードとに切り換え自在に構成されているスタッカクレーン。
(もっと読む)
スタッカクレーン
【課題】クレーン本体の走行や荷台の昇降等の動作を効率よく行うことができ、かつ消費電力を減少させることができるスタッカクレーンを提供すること。
【解決手段】荷を荷棚に対して入出庫させるスタッカクレーン1であって、床面に設けられてクレーン本体2及び荷台18を操作する地上部は、クレーン本体2を走行させる走行駆動手段16と、走行駆動手段16を制御するメイン制御ブロック24と、を有するとともに、クレーン本体2は、荷台18を昇降させる昇降駆動手段20と、昇降駆動手段20を制御する昇降制御ブロック30と、を有しており、メイン制御ブロック24が行うクレーン本体2の走行制御及び昇降制御ブロック30が行う荷台18の昇降制御の各始動時刻と各完了時刻とを同期させる時刻同期手段28,31をさらに備える。
(もっと読む)
走行車とその走行制御方法
【課題】 3相誘導走行モータを備えた走行車を、目標速度パターンに従って走行させる。
【構成】 走行モータの速度毎の制御ゲインとを記憶し、記憶した目標速度と速度毎の制御ゲインとにより、3相誘導走行モータの駆動用インバータを制御する。
(もっと読む)
スタッカクレーン
【課題】スタッカクレーンの移載装置上で積載物の重心の位置が作動許容範囲にあるか否かを検出することができるようにする。
【解決手段】フォーク装置23を構成する支持枠24の一対の側枠242,243の上部にはチェーン26,27の一端が荷重検出器28A,28Bを介して接続されている。フォーク装置23の重量は、荷重検出器28A,28Bに等分に配分される。荷重検出器28A,28Bによって検出された分荷重検出情報は、スタッカクレーン12に設けられた副制御コンピュータC2へ送られる。副制御コンピュータC2は、パレットPと物品Uとを合わせた積載物Wの重心Gの位置を算出する。算出された重心Gの位置が予め設定された作動許容範囲L内にない場合、副制御コンピュータC2は、スタッカクレーン12の作動を禁止する
(もっと読む)
スタッカクレーンの制振方法
【課題】製造コストの上昇を招くことなく、発生する昇降台の自由振動の振幅を小さくして、作業効率を向上させるスタッカクレーンの制振方法を提供する。
【解決手段】増速領域、等速領域、及び減速領域を備えた速度パターンで走行レール11上を往復走行可能な走行台車12と、これに立設された昇降マスト13と、搬送物13aを搭載し昇降マスト13に沿って昇降する昇降台14を有するスタッカクレーン10の制振方法であって、昇降台14及び搬送物13aの重量と昇降台14の高さ位置に基づいて、スタッカクレーン10の固有振動周期を予め求め、この2倍以上の整数倍の時間に増速領域及び減速領域の時間を設定し、増速領域及び減速領域の各加速度パターンを、左右対称の増加及び減少加速度と負の増加及び負の減少加速度として、搬送物13aを搭載した昇降台14の増速領域及び減速領域の終了後に発生する自由振動の振幅を小さくする。
(もっと読む)
フォーク式の物品移載装置
【課題】物品を載置支持した状態においても、フォークを突出位置に精度よく突出させることができるフォーク式の物品移載装置の提供。
【解決手段】出退方向において突出位置よりも設定量だけ手前の手前位置にフォーク25cにて載置支持された物品4が到達しているとON状態となり、且つ、手前位置をフォーク25cにて載置支持された物品4が通過するとOFF状態となる到達通過検出手段35と、出退用電動モータの回転情報を検出する回転情報検出手段とが設けられ、出退制御手段は、突出作動処理として、到達通過検出手段35がON状態からOFF状態に状態変化するまでフォーク25cを引退位置から突出位置に向けて突出させる初期突出処理を行い、その後、到達通過検出手段35が状態変化した時点からの回転情報検出手段の検出情報に基づいて、フォーク25cを設定量S突出させる後期突出処理を行う。
(もっと読む)
物品搬送設備
【課題】移動体を制動できない状態で移動体の移動を開始することを防止できる物品搬送設備を提供すること。
【解決手段】駆動手段(M1)にて移動自在な物品搬送用の移動体と、移動体の移動を制動する制動状態と制動解除状態とに切り換え自在な制動手段(B)と、駆動手段及び制動手段を制御する制御手段(7)とが設けられ、制御手段が、制動手段を制動状態にし且つ駆動手段を駆動させるべく駆動手段及び制動手段を制御する制動状態確認用処理を制動状態確認用タイミングにおいて実行するように構成されている物品搬送設備。
(もっと読む)
物品搬送装置
【課題】移動体を長時間停止させた後でも物品搬送能力を極力維持することができる物品搬送装置を提供すること。
【解決手段】径方向に弾性変形自在な走行車輪を備えた移動体の走行経路に沿って測距用媒体を移動させて移動体と基準位置間を測距する距離計測手段(25)の測距情報に基づいて移動体の走行を制御する制御手段(27)が、設定停止時間以上継続して移動体を停止させた連続停止状態の場合には、その後の移動体の走行量が設定解除条件を満たすまでの間に、本運転用の高速走行速度を目標走行速度の最高速度として移動体を走行させる本運転制御を実行したときに距離計測に異常が発生したときには、移動体の走行量が設定解除条件を満たすまでの間は、本運転用の高速走行速度よりも低速の仮運転用の低速走行速度を目標走行速度の最高速度として移動体を走行させる仮運転制御を実行する物品搬送装置。
(もっと読む)
物品搬送設備
【課題】過速度検出手段の動作確認をするための時間を割くことなく搭乗運転モードにおける信頼性を向上させることができる物品搬送設備を提供すること。
【解決手段】非搭乗制御用の最高速度以下で移動体を移動させる非搭乗運転モード、非搭乗制御用の最高速度よりも低い搭乗制御用の最高速度以下で移動体を移動させる搭乗運転モードに切換え自在な運転制御手段(C3)と、移動速度が搭乗制御用の最高速度よりも高速に設定された許容限度速度以上であると過速検出信号を出力する過速度検出手段(15,16)と、運転制御手段が搭乗運転モードのときに過速度検出手段が過速検出信号を出力すると駆動手段(1a,2b)の作動を停止させる強制停止手段(23,24)と、運転制御手段が非搭乗運転モードで且つ移動体を許容限度速度以上の速度で移動させるときに、過速度検出手段が過速検出信号を出力しないと異常と判別する過速度検出監視手段(17,18)とを備えた物品搬送設備。
(もっと読む)
スタッカクレーンの制振制御方法
【課題】簡易な方法で確実にマストの揺動を低減するようにしたスタッカクレーンの制振制御方法を提供すること。
【解決手段】2値の加速度の切替によりスタッカクレーンのマスト揺動の固有周波数成分を加振減となる速度と加速度から除去した運転パターンによりスタッカクレーンの振動を抑制するようにする。特に、運転パターンからマスト揺動の固有周波数の3次高調波成分を速度指令値の移動平均により除去し、振動を抑制することにより、簡易な方法でスタッカクレーン本体だけでなく、それに付設の昇降体や移載機等の機械的な余分な振動をも抑制する。
(もっと読む)
物品搬送装置
【課題】走行体の走行作動中に走行体の走行制御に対する外乱や長尺柔軟体の動特性の変化が発生した場合であっても長尺柔軟体の振動を抑制することができ、かつ、制御手段を構成し易い物品搬送装置を提供すること。
【解決手段】制御手段(27)が、長尺柔軟体の振動を抑制するべく、振動抑制用の制振走行速度パターンを生成して、この制振走行速度パターンに基づいて走行駆動手段(HD)を作動させるフィードフォワード制御、及び、走行体の走行中における挙動検出手段(S)の検出情報に基づいて、制振走行速度パターンを補正して、この補正された制振走行速度パターンに基づいて走行駆動手段を作動させるフィードバック制御により走行体の走行を制御するように構成されている物品搬送装置。
(もっと読む)
物品搬送装置
【課題】長尺柔軟体の固有振動数が低い場合でも不都合がなく、かつ、走行体が停止するときに逆走しないような制振走行速度パターンを生成することができる物品搬送装置を提供すること。
【解決手段】制御手段(27)が、長尺柔軟体の振動を抑制するべく、振動抑制用の制振走行速度パターンを生成して、この制振走行速度パターンに基づいて走行駆動手段(HD)を作動させるフィードフォワード制御により走行体の走行を制御するように構成され、フィードフォワード制御として、長尺柔軟体の振動モデルの逆システムにより、制振走行速度パターンを生成するように構成されている物品搬送装置を構成した。
(もっと読む)
物品搬送装置
【課題】走行体の走行作動中における複数の振動モードによる長尺柔軟体の振動を抑制することができる物品搬送装置を提供すること。
【解決手段】走行体に吊り下げ状態又は立設状態で装備された物品支持用の長尺柔軟体と、走行体を設定された走行速度パターンにて走行させるべく、走行速度パターンに基づいて走行駆動手段(HD)を作動させて、走行体の走行を制御する制御手段(27)とが設けられ、長尺柔軟体の走行体側の端部箇所に、当該端部箇所における変形量に対応した検出情報を出力する歪ゲージ(S)が設けられ、制御手段が、長尺柔軟体の振動を抑制するべく、走行体の走行作動中における歪ゲージの検出情報に基づいて、走行速度パターンを補正するフィードバック制御により走行体の走行を制御するように構成されている物品搬送装置。
(もっと読む)
搬送装置
【課題】モータ間の干渉による搬送装置の振動を抑制する。
【解決手段】指令パルスに対する位置誤差を加減算器16で求めて、位置制御器2で速度指令を発生し、速度指令との速度誤差を加減算器18で求め、速度制御器4で電流指令を発生し、マスターモータM1に加える。スレーブモータ側の速度をパルスジェネレータで求めて速度指令からの誤差を求め、スレーブ側の電流指令を発生する。マスター側の電流指令とスレーブ側の電流指令を加減算器21で組み合わせて、スレーブモータM2に加える。
(もっと読む)
走行台車とそのシステム
【課題】滑りを解消するように駆動モータをフィードバック制御することにより、目標とする速度パターンからの遅れを抑制した走行台車を提供する。
【解決手段】走行台車2の走行車輪8,9の回転数から走行距離をエンコーダ11,12で求め、台車2の絶対位置をリニアセンサ13,14で求める。所定の時間間隔でのエンコーダ値の変化分とリニアセンサ値の変化分との差を滑りとし、滑りを解消する側に走行制御部16,17を介して走行モータ6,7を制御する。
(もっと読む)
走行台車
【構成】 前後2輪の走行車輪を各2台のサーボモータで駆動し、走行時には4台のサーボモータを全てマスターとして、速度指令をサーボアンプに入力して制御する。停止時には、走行モータM1をマスターに他のモータM2〜M4をスレーブとする。
【効果】 高加速で走行しかつ速度指令に高速応答でき、停止時には走行モータ間で干渉が生じない。
(もっと読む)
昇降式の物品搬送設備
【課題】一対の昇降体を非同期状態及び同期状態のいずれでも昇降させることができ、かつ、同期して昇降させる場合には、一対の昇降体の相対昇降位置を精度よく一定に維持させた状態で各昇降体を昇降させることができる昇降式の物品搬送設備を提供すること。
【解決手段】第1昇降体4aと第2昇降体4bとを同期状態で昇降させる同期運転状態の場合には、それら昇降体のうちの一方に対する目標駆動状態を第1昇降位置検出手段21a及び第2昇降位置検出手段21bのうちのそれに対応する昇降位置検出手段の情報に基づいて求めて、その求めた目標駆動状態を共通の目標駆動状態として、第1インバータ28a及び第2インバータ28bに指令するように構成されている昇降式の物品搬送設備を構成した。
(もっと読む)
物品保管装置
【課題】収納棚の複数の物品収納部に収納されている物品の夫々について、物品がスタッカークレーン側に突出しているか否かを極力迅速に検出することが可能となる物品保管装置を提供する。
【解決手段】スタッカークレーン3の走行方向端部であって且つ収納棚の前面に近接する位置において、最上部に位置する物品収納部よりも上方側の上部位置、又は、最下部に位置する物品収納部よりも下方側の下部位置から上下方向に検出光を投射して、物品収納部から物品がスタッカークレーン側に突出しているか否かを検出する突出状態検出手段28がスタッカークレーン3に備えられ、運転制御手段が、検査モードが指令されると、スタッカークレーンを物品搬送用の走行速度よりも低速の検査用走行速度で走行させ、且つ、突出状態検出手段にて物品の突出を検出するようにスタッカークレーン3の運転を制御する。
(もっと読む)
1 - 20 / 27
[ Back to top ]