
Fターム[3F077BB09]の内容
船舶の荷積み、荷おろし (441) | 荷役装置の形態 (65) | 走行移動するもの (22) | ガーダを持つもの (6)
Fターム[3F077BB09]に分類される特許
1 - 6 / 6
廃棄物移送方法
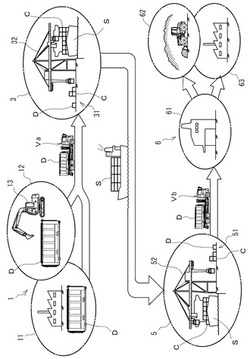
【課題】 発生した廃棄物を容易に、長距離にわたって移送する。
【解決手段】 工場11や工事現場12といった廃棄物発生地1において廃棄物が投入された脱着式コンテナDを荷役車両Vaにより出発港3の一区画に設けたコンテナ集約所31まで運搬し、コンテナ集約所31まで運搬された脱着式コンテナDをガントリークレーン32によりコンテナ船Sに積載して海上移送し、コンテナ船Sで海上移送された脱着式コンテナDをガントリークレーン52によりコンテナ船Sから下ろした後、処理場61(廃棄物処理地6)まで他の荷役車両Vbにより運搬する。
(もっと読む)
ロープトロリ式アンローダのバケット位置決め方法

【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時には横行方向後方の巻上げロープを巻き込むことによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出してグラブバケット53をトロリ7が走行して来た方向の前方へ振り出させて槽8'内へ着地させることにより、槽口9直下よりも前後外側奥部のバラ物80を陸揚げ可能にした。
(もっと読む)
荷役用クレーンの走行位置制御装置
【課題】荷役用クレーンの走行位置をコンテナに的確且つ速やかに一致させると共に、手間やコスト増を抑制するる。
【解決手段】走行レール上を走行し、その走行方向に隙間を空けて並べられた複数コンテナ3のうち対象コンテナの中心位置に、走行位置を合わせてコンテナを荷役する荷役用クレーンの走行位置制御装置において、走行方向について荷役用クレーンと同期して移動し、走査角度範囲内16に複数コンテナ3が含まれるように取り付けられ、走査角度ごとにコンテナ表面までの距離を計測する走査型の距離計10を備える。計測された距離とその走査角度18とを関連付けた測定データを記憶する。記憶された複数の測定データに基づいて対象コンテナの中心位置と荷役用クレーンの位置との走行方向に関する相対距離を算出する。相対距離を零に近づけるように荷役用クレーンを走行させる。
(もっと読む)
起重機
【課題】ばら物を荷役する起重機において、ばら物の荷役効率を向上させる。
【解決手段】ばら物4を陸揚げするアンローディングクレーン1において、ばら物4をばら積み船3から掴持して吊り上げる開閉式のグラブバケット6と、そのグラブバケット6からばら物を受け取り、ホッパまで横行搬送するトラバーサ7とを備えた。このトラバーサ7の下部に、ばら物4をグラブバケット6から受け取り、ホッパ8の投入口に対して斜めに投入するバケット部7bを設けた。
(もっと読む)
リーファーコンテナの荷役方法、及びその荷役制御システム
【課題】電源ケーブルの連結を解除する解放作業を行う作業員と、荷役作業を行うクレーンオペレータが有する情報を共有化し、リーファーコンテナの電源ケーブルの切断事故を防止し、荷役作業の安全性の高いリーファーコンテナの荷役方法を提供する。
【解決手段】コンテナターミナル1で荷役するリーファーコンテナ5Rの荷役方法において、リーファーコンテナ5Rの電源ケーブル6の接続の状態を、リーファーコンテナの管理システム10で収集する接続情報収集ステップと、接続情報をコンテナターミナル制御システム4に送信するデータ蓄積ステップと、リーファーコンテナ5Rの荷役を行う岸壁クレーン3又は門型クレーン25が、コンテナターミナル制御システム4から接続情報を車載端末14で受信する受信ステップと、接続情報を基に、岸壁クレーン3又は門型クレーン25で、リーファーコンテナ5Rを荷役する荷役作業ステップを有する。
(もっと読む)
コンテナクレーンの対象物位置計測装置と該対象物位置計測装置を用いた自動荷役装置
【課題】スプレッダと吊り上げ目標コンテナ、吊り荷コンテナと積載目標物の位置を同時計測し、積み込み積み卸し時の位置決めを正確に行えるようにする。
【解決手段】トロリー8に巻上げロープ10を介して懸吊されたスプレッダ9にて保持されるコンテナ11の長手方向一端よりも外方位置となるように、トロリー8の横行方向と直角方向の一側に、レーザレーダ19を取付部材32を介して取り付ける。トロリー8に懸吊されたスプレッダ9、スプレッダ9に保持した吊り荷コンテナ11と、その下方に位置する、吊り上げ目標コンテナ11、又は、吊り荷コンテナ11の積載目標物を、レーザレーダ19により斜め上方より走査して3次元位置を同時計測し、その3次元位置情報を基に、スプレッダ9下面と吊り上げ目標コンテナ11の上面、又は、吊り荷コンテナ11下面と積載目標物の上面が一致するよう上記巻上げロープ10の長さとトロリー8の横行を制御させる。
(もっと読む)
1 - 6 / 6
[ Back to top ]