
Fターム[3F111DB09]の内容
Fターム[3F111DB09]に分類される特許
1 - 5 / 5
線状体貯線装置
【課題】巻取機による線状体の巻取速度の変化に応じて線状体貯線装置の出側における線状体の張力、ひいては線状体貯線装置の出側及び入側における線状体の張力をそれぞれ一定に保つことができる線状体貯線装置を提供すること。
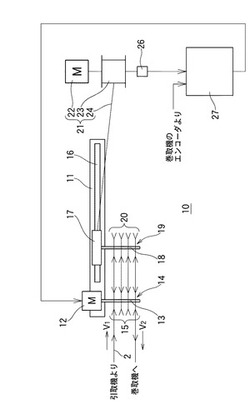
【解決手段】線状体貯線装置10は、回転駆動される固定シーブ支持軸13に軸受を介して回転自在に支持された固定シーブ14と、固定軸18に軸受を介して回転自在に支持されるとともに、前記固定シーブ14に対して近接・離隔自在に設けられた移動シーブ19と、前記移動シーブ19を前記固定シーブ14に対して離隔する方向に牽引する牽引ユニット21と、巻取機6による線状体2の巻取速度の変化に応じて前記固定シーブ14と前記巻取機6間の線状体2の張力を一定に保つように、前記巻取機6による線状体の巻取速度V2に基づいて前記固定シーブ支持軸13の回転数を制御する制御手段25〜27とを備える。
(もっと読む)
線材張力調整装置

【課題】 線材引き出し速度の急激な加減速があっても、線材に作用する張力を安定させることができる線材張力調整装置を提供する。
【解決手段】 線材が巻掛けられる送り出し用プーリ21と、この送り出し用プーリ21を回転駆動して上流側にある線材を下流側へ送り出すサーボモータ22と、送り出し用プーリ21よりも下流側に配設され、下流側から引っ張られて引き出される線材の張力を検出する張力検出部50と、送り出し用プーリ21よりも下流側に配設され、下流側から引っ張られて引き出される線材の移動速度を検出する速度検出部40とを備える。そして、速度検出部40で検出された線材の移動速度に基づきサーボモータ22の回転速度を制御するとともに、張力検出部50で検出された線材の張力に基づきサーボモータ22の回転速度を補正することにより、送り出し用プーリ21から送り出された線材の張力を調整する。
(もっと読む)
線状物貯線装置
【課題】 貯線時の緩みの発生の防止。
【解決手段】 貯線装置10は、固定シーブ12と、移動シーブ14と、牽引ユニット16と、検出手段18と、制御手段20とを備えている。シーブ12は、線状物Aを入出線するようにガイドするものである。シーブ14は、シーブ12に対して、近接・離隔自在に設けられている。ユニット16は、シーブ14を、シーブ12に対して、近接・離隔する方向に牽引するものである。検出手段18は、シーブ14の移動方向および移動量を検出する。制御手段20は、シーブ14とシーブ12との間の離隔状態に応じて、線状物Aが緩まない張力状態になるように、牽引ユニット16の牽引力を制御する。
(もっと読む)
線条材料の巻取方法及び心線の巻取方法
【課題】線条材料の送出方向に沿って並設される一のプーリの周速度に、他のプーリの周速度を良好に追従させられる線条材料の巻取方法を提供することにある。
【解決手段】線条材料の送出方向の上流側に配置される第1ボビンから前記線条材料を引き出し、前記送出方向の下流側に配置される第2ボビンによって前記線条材料を巻き取る、線条材料の巻取方法において、上流側に引出プーリを下流側にテンションプーリを設ける。テンションプーリに第2エンコーダ12aを設け、これにより検出されるテンションプーリの回転を、引出プーリの軸部に接続される第1サーボモータ3に送信する。このようにして、テンションプーリの周速度と、引出プーリの周速度と、を揃える。
(もっと読む)
巻取設備の制御方法
【課題】 一対の巻取機と巻戻機とから構成される巻取設備に好適な制御方法を提供する。
【解決手段】 巻取材料の過渡的な伸縮などに起因して巻取側に速度リプルが発生すると、この速度リプルをパルスエンコーダ(PE)と速度・位置信号処理器14aとローパスフィルタ14bとハイパスフィルタ14cとにより検知し、検知した速度リプルに基づく値を上位コントローラ15からのトルク設定値から減算してなる永久磁石同期電動機(SM)への新たなトルク指令値は、前記巻取側では前記電動機(SM)へのトクル設定値は駆動トルク(すなわちプラス極性)であることから、前記速度リプルをダンピングさせるトルク設定値となり、従って、このダンピング量を調整することにより、巻取材料の速度をより安定にした巻取制御が実現できる。
(もっと読む)
1 - 5 / 5
[ Back to top ]