
Fターム[3F204DC05]の内容
クレーンの細部(制御、安全) (2,955) | 位置検出器の種類 (130) | 音響的 (8)
Fターム[3F204DC05]に分類される特許
1 - 8 / 8
クレーンの制御方法
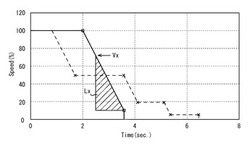
【課題】スプレッダを巻下ろしてコンテナに接近させる際に、スプレッダとコンテナの衝突を防止し、且つ、短時間でスプレッダとコンテナの接触を実現したクレーンの制御方法を提供する。
【解決手段】主巻ワイヤロープに吊られたスプレッダと、スプレッダと海上用輸送コンテナの間の距離を計測する距離計測センサを有するクレーン1の制御方法において、センサでスプレッダとコンテナ間の距離Lxを計測する距離計測ステップと、距離Lx及びスプレッダのブレーキ時の加速度から上限速度Vxを算出する算出ステップと、スプレッダ7の移動速度を上限速度Vxに制御する減速ステップを有する。
(もっと読む)
洋上荷役システム及びこれを備えた洋上浮遊体

【課題】吊荷の水中高度を精度良く維持しつつ上下動を抑制することが可能な洋上荷役システムを提供する。
【解決手段】洋上浮遊体に取付けられるウィンチ等の荷役機構W1と、荷役機構W1より引き出され吊荷52を懸架するワイヤロープ511と、ワイヤロープ511の引き出し量を変化させ吊荷52を下降または上昇させるように荷役機構W1を制御する制御手段6とを具備するものであって、制御手段6が、吊荷52に設けられる海底31との距離を測る水中高度検出部651と、吊荷52の水中高度Hを制御するためのワイヤロープ511の引き出し量補正値を水中高度検出部651からの検出値に基づいて出力する高度補正指令部88とを備え、高度補正指令部88からの出力値をフィードバックして荷役機構W1の制御を行うように構成した。
(もっと読む)
洋上荷役システム及びこれを備えた洋上浮遊体
【課題】吊荷の上下動や揺動および定常的な傾きを抑制することが可能な洋上荷役システムを提供する。
【解決手段】同一の洋上浮遊体2に取付けられる複数のウィンチ等の荷役機構W1〜W4と、それらより引き出され吊荷52を協働して懸架するワイヤロープ511〜514と、それらの引き出し量を変化させ吊荷52を下降または上昇させるように荷役機構W1〜W4を制御する制御手段6とを具備する洋上荷役システムであって、制御手段6が、洋上浮遊体2または吊荷52に設けられる揺動検出部621と、吊荷52の揺動を抑制するための各ワイヤロープ511〜514の引き出し量補正値V11〜V12を揺動検出部621からの検出値に基づいて出力する揺動補正指令部82とを備え、揺動補正指令部82からの出力値をフィードバックして荷役機構W1〜W4の制御を行うよう構成した。
(もっと読む)
ロープトロリ式アンローダのバケット位置決め方法
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時には横行方向後方の巻上げロープを巻き込むことによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出してグラブバケット53をトロリ7が走行して来た方向の前方へ振り出させて槽8'内へ着地させることにより、槽口9直下よりも前後外側奥部のバラ物80を陸揚げ可能にした。
(もっと読む)
グラブバケット式アンローダのバラ物陸揚げ方法
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時は、横行方向前方の巻上げロープの巻き込みと横行方向後方の巻上げロープの繰り出しを同期させ、且つ横行方向後方の巻上げロープの繰り出しを遅らせることによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出すことによりグラブバケット53を前方へ振り出させるようにし、バラ物を掴んだグラブバケット53は、前方への振り出しと同時に開放を行ってバラ物をホッパ10内へ投入する。
(もっと読む)
クレーン装置における位置検出装置
【課題】、超音波を用いた測距技術を利用することで、ブームの撓み変形の影響を排して、ブーム先端部あるいはフックの二次元位置を高精度で検出できるクレーン装置における位置検出装置を提供する。
【解決手段】ブーム3の先端部3bに取付けられた超音波発信器11から発信される超音波を、車両1側に離間状態で取付けられた第1超音波受信器12と第2超音波受信器13においてそれぞれ受信し、超音波の発信時から各超音波受信器12、13のそれぞれにおける受信時までの超音波の伝播時間をそれぞれ求め、これら各伝播時間に基づいて各超音波受信器12、13と超音波発信器11の距離をそれぞれ求めることで、車両1に対するブーム3の先端部3bの位置を算出する。係る構成によれば、例えブーム3に撓み変形が生じていても、またその変形量の多少に拘らず、この撓み変形の影響を完全に排除して、ブーム3の先端部3bの車両1に対する位置を極めて精度良く検出することができる。
(もっと読む)
スプレッダの衝突防止装置
【課題】2台のスプレッダを操作して、コンテナヤードに混在する40ft型コンテナと20ft型コンテナを同時に取り扱うという作業において、スプレッダによるコンテナの誤吊り上げや衝突事故を防止するとともに、作業の効率化を図る。
【解決手段】スプレッダの本体フレーム10の底面に、横行方向の中心軸上に所定の間隔をおいて第1超音波センサー群20と、走行方向の中心軸上に所定の間隔をおいて第2の超音波センサー群21とを配置して、第1超音波センサー群20の検出信号に応じてスプレッダの巻き下げ速度を制御し、第2超音波センサー群21の検出信号に応じてコンテナの種類を識別する。
(もっと読む)
クレーンの積み降ろし位置決定方法およびその装置
【課題】クレーンで吊り上げた被搬送物を地上運搬車の荷台に精度よく積載するための積み降ろし位置決定方法と積み降ろし位置決定装置を提供する。
【解決手段】クレーンで吊り上げた被搬送物を停車した地上運搬車の荷台に積み降ろすに際し、地上運搬車の停車位置の後方に設置した距離センサーで荷台後部の左右両幅端部の位置を測定し、該両幅端部の位置から荷台の幅方向の中心を求め、この中心と吊り上げた被搬送物の幅方向中心とが一致するようクレーンを移動させ、その後、被搬送物を荷台上に積み降ろすことを特徴とするクレーンの積み降ろし位置決定方法。
(もっと読む)
1 - 8 / 8
[ Back to top ]