
Fターム[3F204EB07]の内容
クレーンの細部(制御、安全) (2,955) | 振れ角検出器 (63) | 振れ方向 (30)
Fターム[3F204EB07]の下位に属するFターム
直交する垂直面内 (24)
Fターム[3F204EB07]に分類される特許
1 - 6 / 6
クレーンの吊り荷の振れ角度検出装置
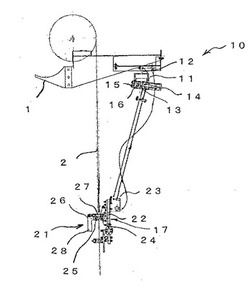
【課題】制御器での角度変換の必要がなく、検出ロッドの長さを一定以上に長くするなどの組み込みの制約もなく、コンパクトかつ簡単な機構で高精度かつリアルタイムに吊り荷の振れ角を検出することができるクレーンの吊り荷の振れ角度検出装置を提供する。
【解決手段】クレーン起伏中心軸と平行な起伏軸13周りとこれと直交する水平な旋回軸14周りの2軸の角度または角速度を検出するMEMS慣性センサが設けられた検出器本体17をクレーン先端部1から吊り下げ部材16を介して吊り下げるとともに、吊り荷を巻き上げ下げするワイヤロープ2に相対移動可能かつワイヤロープの振れ角に追従可能に検出器本体17を設ける。これにより、吊り下げ部材16で吊り下げた検出器本体17をワイヤロープ2の振れに追従させ、検出器本体17に設けたMEMS慣性センサによりリアルタイムで精度良く振れ角度を検出することで、装置をコンパクトにする。
(もっと読む)
クレーンの衝撃緩和装置

【課題】クレーンの物理的衝撃及び自動停止時の衝撃を緩和させることによって、確実に荷振れを防止し、安定した荷役作業を可能にする。
【解決手段】このクレーンの衝撃緩和装置は、クレーンのブーム伸縮長さ、ブーム起伏角度、ウインチのワイヤロープ繰り出し量およびブーム旋回角度の各動作の位置情報を検出する位置情報検出器と、その位置情報検出器からクレーンの各動作の位置情報を取得するコントローラとを備えている。そして、このコントローラは、位置情報検出器から取得したクレーンの各動作の位置情報に基づいて、クレーンの物理的衝撃及び自動停止時の衝撃を緩和させるようにクレーン速度を制御する衝撃緩和処理(ステップS10、S50、S80、S100)を実行する。
(もっと読む)
クレーンの巻上げギヤを制御するためのクレーン制御器
【課題】クレーンの巻上げギヤを制御するためのクレーン制御器に関するものであって、動的荷重を考慮した改良されたクレーン制御器を提供する。
【解決手段】クレーンの巻上げギヤの制御において、巻上げロープの弾性に起因する動的振動を考慮して、該動的振動を低減させるように巻上げギヤを適切に制御するもので、該巻上げギヤの駆動速度をオーバーシュートを抑制するために最大許容駆動速度に制限する。この最大許容駆動速度はクレーンデータを基に動的に決定される。
(もっと読む)
ロープトロリー式クレーンの振れ止め制御装置
【課題】振れ角を検出する装置を設けなくても運搬物の揺れを制御することができ、高速作業を行う設備や振れ止め制御にそれほど高い性能が要求されない設備にも採用できるロープトロリー式クレーンの振れ止め制御装置を提供する。
【解決手段】ロープ6の現在の振れ角φを算出する振れ角算出部12と、トロリー5を停止させるために必要な減速度αpを求める減速度算出部11と、トロリー停止位置においてロープ6の振れが停止するために必要な必要振れ角φを算出する必要振れ角算出部13と、現在の振れ角θreaと必要振れ角θrefとの差θdefを算出する誤差算出部14と、ロープ6の振れ角を現在の振れ角θreaから必要振れ角θrefに変更させるために必要なトロリー5の調整減速度αcを算出する調整減速度算出部15と、調整減速度αc基づいて、トロリーの調整速度Vrを指示する速度指令信号を送信する速度制御部16とを備えている。
(もっと読む)
荷役支援方法および荷役支援システム
【課題】 保持した荷物が振れていても、荷物を所定位置に正確に荷降ろしできるようにする。
【解決手段】 保持具または前記荷物が所定位置の上方の所定高さまで下降したときに(ステップ106)、保持具または荷物と所定位置との相対位置と、保持具または荷物の振れの状態を求める108、110)。その後、保持具または荷物を所定高さから所定位置まで下降させる間の、振れに基づく保持具または荷物の水平方向位置の変化を予測する(ステップ112)。予測した位置の変化に基づいて定置させてもよいか否かを判断する(ステップ114、116)。定置させてもよいと判断したときに巻き下げレバーが操作されていると(ステップ118)、巻きモータを高速駆動してコンテナを着荷させる(ステップ120)。
(もっと読む)
搬送手段の制御システム
【課題】 従来の搬送手段における制御システムでは、作業者が、良好な操作感覚で荷物を昇降させることができない上に、荷物の把持と操作レバーの操作とを同時に行って荷物を水平移動させることができない。
【解決手段】ロープ2の下部に掛かる力であって作業者による上下方向の操作力、荷物の質量および荷物の加速度による力の大きさを計測する力計測手段3と、力計測手段3の計測結果に基づき第1演算部がサーボモータの回転の方向および速度を演算してサーボモータに駆動指令の信号を出す第1制御手段4と、ロープ巻揚げドラムから巻き下げられたロープ2の長さを計測する長さ計測手段と、ロープ2によって吊り下げられた荷物の重量を計測する重量計測手段と、作業者が荷物を水平方向へ押した時のロープ2が垂直面とで成す振れ角の角度を計測する角度計測手段と、長さ計測手段、重量計測手段および角度計測手段からの計測情報に基づき第2演算手段7がクレーンの走行条件を演算してクレーンに駆動指令の信号を出す第2制御手段と、を具備したことを特徴とする。
(もっと読む)
1 - 6 / 6
[ Back to top ]