
Fターム[3F333FA32]の内容
フォークリフトと高所作業車 (11,384) | 安全・制御種類 (1,606) | 原動機出力制御 (151) | モーター出力制御 (115)
Fターム[3F333FA32]に分類される特許
1 - 20 / 115
電気モータ制御装置
【課題】固定容量型のポンプを使用しつつ、レバーの操作量に応じた速度でアクチュエータを駆動する。
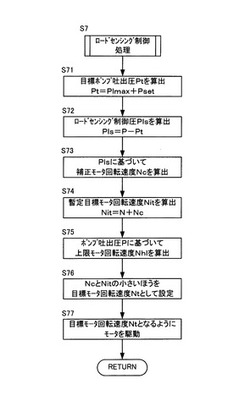
【解決手段】電気モータの回転速度を制御する電気モータ制御装置であって、ポンプの吐出圧が最高負荷圧よりも所定の設定圧だけ高くなるように、最高負荷圧に基づいて電気モータの暫定目標回転速度を算出し(S74)、ポンプの吐出圧に基づいて、電気モータの出力トルクがその吐出圧のときに出力可能な最大トルクとなる電気モータの回転速度を上限回転速度として算出し(S75)、暫定目標回転速度と上限回転速度とのうち、低いほうを電気モータの目標回転速度として算出し(S76)、電気モータの回転速度が目標回転速度となるように、電気モータの回転速度を制御する(S77)ことを特徴とする。
(もっと読む)
搬送装置

【課題】ワークを載置する際にワークに損傷を与えることなく、また少ない電力消費で接地検出する。
【解決手段】クランプ部を昇降モータの駆動により昇降するクランプリフトにおいて、ワークをクランプしていない状態でクランプ部を下降させるときの昇降モータの電流値を事前に検出し、電流値に基づき電流閾値Isを設定する。例えば電流値の105パーセントの値を電流閾値Isとする。そして、ワークを搬送先に載置するためにクランプ部を下降させるときは、昇降モータの電流値Iwを検出しながら、電流閾値Isと比較して、電流値Iwが電流閾値Isより大きくなったら昇降モータの駆動を停止し、クランプ部の下降を止める。これによりワークに損傷を与えることなく、少ない電力消費で接地検出を行う。
(もっと読む)
ハンド走行リフター
【課題】ハンドルに設けた歪量に応じたモータの駆動を行うハンド走行リフターにおいて、後輪が浮き上がった際に、その浮き上がりを押さえ込むべくハンドルを押さえ込むと、ロードセルに歪が生じ、これにより前輪が駆動されると危険であるという問題がある。
【解決手段】後輪6が非接地状態になったこと、又は、非接地状態と同様の状態になったことを検知する非接地検知手段10を設け、この非接地検知手段10が作動した際は、ハンドル7操作による前輪4L駆動操作を無効化させるよう制御してなるハンド走行リフターの構成とする。
(もっと読む)
油圧システムおよび該油圧システムを備えたフォークリフト
【課題】所定の順序動作を確実に確保することができる油圧システムおよび該油圧システムを備えたフォークリフトを提供する。
【解決手段】フォーク付きのリフトブラケットを昇降させる第1油圧シリンダ5と、第1油圧シリンダ5が設けられたインナマストを昇降させる第2油圧シリンダ6A、6Bと、第1および第2油圧シリンダ5、6A、6Bを接続する配管11、12と、油圧装置10Aとを備えた油圧システム1Aであって、油圧装置10Aは、作動油タンク14の作動油を吸引して吐出する油圧ポンプ15と、油圧ポンプ15を駆動する油圧モータ16と、作動油の温度を検出する温度検出手段17と、温度検出手段17により検出された温度が低いほど油圧モータ16の最大回転数を小さく設定する回転数設定部18と、最大回転数を超えないように油圧モータ16の回転数を制御する制御部19と、を有することを特徴とする。
(もっと読む)
ハイブリッド型産業車両
【課題】発電電動機の寿命を長期化することのできるハイブリッド型産業車両を提供することを目的とする。
【解決手段】ハイブリッド型産業車両1は、エンジン2と、荷役に用いられる荷役用発電電動機3と、エンジン2および荷役用発電電動機3の両方から動力の供給を受けて駆動可能な荷役装置4と、ハイブリッド制御システム8とを主な構成として有する。ハイブリッド制御システム8は、荷役用発電電動機3の力行中においては、荷役用発電電動機3の温度に応じて荷役用発電電動機3の出力を抑制し、荷役用発電電動機3の回生中においては、荷役用発電電動機3の温度に応じて荷役用発電電動機3による回生量を抑制する。
(もっと読む)
把持装置
【課題】ワークを変形させず把持できる把持装置の提供にある。
【解決手段】把持装置は、一対のアーム21に一対の把持プレートをリンクバーを介して支持している。把持プレートには、ワークWに当接する把持面に感圧センサ24を設ける。また、一対のアーム21のアーム間距離を変更させるモータ15には、モータ15の回転軸の回転量を検出するエンコーダを設ける。ワークWを把持するときは、一対の把持プレートがワークWに当接したかを感圧センサ24にて検出する。一対の把持プレートがワークWに当接したら、把持プレートがリンクバーにより上方の最大揺動位置まで揺動するようモータ15を所定量駆動する。把持プレートが最大揺動位置に達したときに、モータ15の駆動を停止して把持操作を完了する。
(もっと読む)
把持装置
【課題】ワークの重量や強度に応じて把持状態を把握できる把持装置の提供にある。
【解決手段】把持装置は、一対のアーム21に一対の把持プレート22をリンクバー35を介して支持している。アーム21には、リンクバー35の回転角度θを検出するポテンショメータ40を設ける。また、一対のアーム21の間隔を変更するモータ15には、モータ15の回転軸の回転量を検出するエンコーダを設ける。ポテンショメータの検出値およびエンコーダの検出値からワークWの把持状態を判断する。さらにエンコーダの検出値からアーム21の移動量を求めるとともに、ポテンショメータ40の検出値から把持プレート22の移動量を求める。移動量に対する移動量の比が所定値以下になったときにモータ15の駆動を停止する。
(もっと読む)
産業車両
【課題】バッテリのバッテリ液面低下時の放電によるバッテリ劣化を抑制し、オペレータに対してバッテリ液面低下状態を確実に認識させることができる産業車両の提供にある。
【解決手段】車体11に搭載されるバッテリ14と、バッテリ14の電力により駆動力を生じる電動モータを備えた産業車両であって、バッテリ14のバッテリ液面が予め設定した設定バッテリ液面以下に達した液面低下状態を検出する液面レベルセンサ47と、液面レベルセンサ47による液面低下状態の検出に基づき、液面低下状態での車両稼動時間である液面低下状態稼働時間を積算する稼働時間積算手段と、液面低下状態稼働時間を記憶する記憶手段と、液面低下状態稼働時間の積算に応じて電動モータの駆動を段階的に制限する電動モータ制限条件に基づき、電動モータの駆動を制御するモータ制御手段と、を備えた。
(もっと読む)
走行制御装置および該装置を備えたフォークリフト
【課題】走行抵抗に影響されることなく加速度を一定に保つことができ、さらに、登坂時において、走行速度を制御することができる走行制御装置を提供する。
【解決手段】アクセル操作および前後進切り替え操作に応じて決定された目標速度で走行させる走行制御装置10であって、走行速度と目標速度との偏差から第1トルク指令値を算出する第1トルク指令値算出手段11と、車両の加速度と正の加速度制限値との偏差から第2トルク指令値を算出する第2トルク指令値算出手段12と、車両の加速度と負の加速度制限値との偏差から第3トルク指令値を算出する第3トルク指令値算出手段13と、第1〜3トルク指令値を比較してトルク指令値を決定するトルク指令値決定手段14と、を備えたことを特徴とする。
(もっと読む)
リーチ型フォークリフトおよびその制御装置
【課題】リーチシリンダ内の作動油が不足してフォークの前後位置が不安定になるのを防ぐことができるリーチ型フォークリフトおよびその制御装置を提供する。
【解決手段】リーチシリンダ6に作動油を供給するための電動機22を制御する制御装置10であって、電動機22の回転数とトルク指令値との対応関係が格納された記憶部11と、電動機22の回転数を繰り返し取得する回転数取得部12と、記憶部11に格納された対応関係を参照して、回転数取得部12によって取得された電動機22の回転数を対応する回転数に維持し得るトルク指令値を選ぶ指令値選定部13と、指令値選定部13によって選ばれたトルク指令値に基づいて、電動機22の出力トルクを指令されたトルクとする電動機制御部14とを備え、上記対応関係は、回転数が増加するにつれてトルク指令値が低下する傾向にあることを特徴とする。
(もっと読む)
フォークリフトの荷役用油圧回路装置
【課題】キャビテーションの発生防止のためにブースタポンプを常に回転させる必要を無くして、キャビテーション発生防止のための動力損失を無くすことができるフォークリフトの荷役用油圧回路装置を提供する。
【解決手段】フォークリフトの荷役用油圧回路装置は、リフト用油圧ポンプ30及びティルト用油圧ポンプ40の吸入側でのキャビテーションの発生を防止するためのブースタポンプ35を備える。このブースタポンプ35は、リフト用油圧ポンプ30及びティルト用油圧ポンプ40における作動油の吸入側に接続されるとともに、駆動モータ36によって回転する。さらに、荷役用油圧回路装置は、制御機構60を備える。この制御機構60は、リフトシリンダ14及びティルトシリンダ19を伸長させるとき、各レバー22,23の操作に基づいて駆動モータ36を回転させるとともに、その回転数を各レバー22,23の操作量に応じて可変に制御する。
(もっと読む)
電気式フォークリフト
【課題】 電気式フォークリフトに適用される荷重表示装置に於て、フルフリーマストを装備したものであっても、容易に荷重を表示できる様にする。
【解決手段】 走行用モータ2、インバータ3、走行操作検出器4、フォーク用リフトシリンダ5、マスト用リフトシリンダ6、マスト揚高検出器7、圧力センサ8、制御装置9、速度計10、荷重計11とで構成し、とりわけ、フォーク用リフトシリンダ6とマスト用リフトシリンダ5との切換え作動時のマスト揚高を検出するマスト揚高検出器7と、両リフトシリンダ5,6への作動油の圧力を検出する圧力センサ8と、マスト揚高検出器7からのマスト揚高と圧力センサ8からの圧力と両リフトシリンダ5,6のシリンダ径とに基づいてフォーク16上の荷重を演算する制御装置9と、制御装置9からの荷重を表示する荷重計11とを備えている。
(もっと読む)
電動車両用制御装置、並びに、これを備えた電動車両及びフォークリフト
【課題】高い振動減衰率を有すると共に、加速性能を維持した電動車両用制御装置、並びに、これを備えた電動車両及びフォークリフトを提供する。
【解決手段】駆動タイヤ及び車軸を有する車体と前記駆動タイヤにトルクを付与する駆動モータMとを備える電動車両F1に用いられ、駆動モータMに対してモータ制御指令T*を供給する電動車両用制御装置1であって、前記車軸を中心とした前記電動車両F1の上下振動を示す振動パラメータによって駆動モータMをフィードバック制御することを特徴とする。
(もっと読む)
フォークリフトの荷役制御装置
【課題】リフトの急降下を防止して停止時のショックを低減するとともに、オペレータの操作負担を軽減する。
【解決手段】荷物を搭載するフォーク33、該フォークを駆動する油圧シリンダ23、該油圧シリンダを駆動する油圧ポンプ27を備え、該油圧ポンプを電力変換器25を介して駆動し、搭載した荷物を下降方向に駆動するとき前記荷物の位置エネルギを前記電力変換器の電源に回生するフォークリフトにおいて、前記変換器を制御するコントローラ100は、前記荷物の荷重および前記荷物の慣性力を演算し、演算した荷重および慣性力の和が前記油圧ポンプを駆動するモータの許容トルクにより定まる牽引力以下となるように下降速度を制限する目標速度演算部を備えた。
(もっと読む)
ホイストシステム及び方法
【課題】ホイストシステム及び方法を提供する。
【解決手段】システムは、エネルギー源に接続され且つホイストポンプに接続されるモータを含む。1つの使用モード時又は運転モード時、モータは、エネルギー源から電力を受け取って、ホイストポンプに機械的動力を供給する。方法は、モータをホイストポンプに機械的に接続させるステップと、エネルギー源からモータに電力を流すようにすることで、ホイスト動作の速度を制御するステップとを含む。
(もっと読む)
作業車両の制御システム
【課題】作業車両が施設内を走行するに際し施設内の場所によって制限がある場合に、確実にその制限を遵守することができる作業車両の制御システムを提供する。
【解決手段】エリア進入検出手段30によってフォークリフト10が屋内エリアB(あるいはエリアA)に進入したことが検出された場合に、屋内エリアB(あるいはエリアA)に対応づけられた車速上限値以下の車速でフォークリフト10を走行制御する走行制御手段が、フォークリフト10に設けられる。
(もっと読む)
車輌
【課題】電力の供給が遮断されている走行用モータ25から生じる回生電流がリチウムイオン2次電池21に充電されるのを遮断して、リチウムイオン2次電池21の充電状態を適切に管理する電動の車輌Bを提供する。
【解決手段】回動する車軸27に設けられた駆動輪28と、車軸27に回転駆動を伝達するように設けられる走行用モータ25と、走行用モータ25に駆動電力を供給するリチウムイオン2次電池21と、リチウムイオン2次電池21から供給される駆動電力を走行用モータ25の駆動に適した電力信号に変換するインバータ24と、インバータ24と走行用モータ25との間に電気的に直列に配置されるスイッチSWとを具備し、スイッチSWは、車輌Bを非走行状態とするスイッチ切り替え入力に応じてオフ状態となる。
(もっと読む)
荷役用油圧制御装置の制御方法
【課題】停止状態にある荷役用油圧シリンダが作動する際の動作を安定させることができる荷役用油圧制御装置の制御方法を提供する。
【解決手段】フォークリフトにおいて、リフトレバー22の操作角度θ1が0度のときは、CPU61はリフト用電磁弁32を閉状態とするとともにリフト用ポンプモータ31を駆動させない。また、リフトレバー22の操作角度θ1が不感帯にあるときは、CPU61はリフト用電磁弁32を閉状態とするとともに、リフト用ポンプモータ31をリフト用始動回転数で回転させる。さらに、リフトレバー22の操作角度θ1が不感帯を超えたときは、CPU61はリフト用電磁弁32を開状態とするとともに、リフト用ポンプモータ31を、リフト用始動回転数に対し操作角度θ1に比例して上昇する回転数を加えたリフト用操作回転数で回転させる。
(もっと読む)
ハンド走行フォークリフター
【課題】走行ベースの後輪をモータ駆動して走行するフォークリフターは、操向性が悪く、目的位置の差込が決り難く、作業操作時間が長くなる。特に作業者がハンドルを把持して操向操作するハンド形態にあっては、直進性と、曲進性は切替り難く、円滑な操向性を維持し難いものである。
【解決手段】リフトフォーク1昇降案内するリフトマスト2を立設する走行ベース3の前側左右両側部に、リーチレッグ4を突出して前端部に前輪5を設け、この走行ベース3の後側底部には操向自在のキャスター6を設け、前記リフトマスト2の後側には、ロードセル7を介して左右両側方へ突出するハンドル8を設けて、このハンドル8の前後方向への曲げ操作力をこのロードセル7により検出して、前記走行ベース3上に搭載した左右一対のモータ9を各々に正、逆転駆動し、前方対向側の前輪5をアシスト駆動して走行することを特徴とするハンド走行フォークリフターの構成とする。
(もっと読む)
バーハンドル式電動リフトの走行速度制御方法
【課題】運転時の安全性を向上させる。
【解決手段】操舵用のバーハンドル26の傾き角度αが直立状態から後方に設定角度範囲α1 〜α2 内、左右の旋回角度が設定角度以上の少なくともいずれかであるとき、アクセルレバーの最大回転角度に対応する最高走行速度を標準速度より小さい設定速度に制限する。
(もっと読む)
1 - 20 / 115
[ Back to top ]