
Fターム[3G093BA23]の内容
車両用機関又は特定用途機関の制御 (95,902) | 目的 (12,965) | 定速走行、オートドライブ (506)
Fターム[3G093BA23]に分類される特許
161 - 180 / 506
車両制御装置
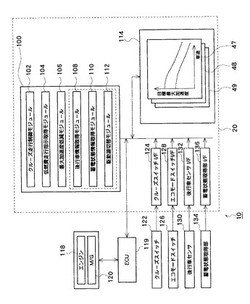
【課題】車両制御装置において、クルーズコントロール走行時に低燃費を優先することを可能とすることである。
【解決手段】車両制御装置20は、クルーズスイッチI/F124と、エコモードスイッチI/F128と、後行車センサI/F132と、蓄電状態取得部I/F136と、記憶部114と、CPU100とを備え、記憶部114は、CPU100において実行される低燃費クルーズコントロール走行プログラムと、自車の目標車速に対する最大加速度の関係を記憶し、CPU100は、クルーズ走行制御モジュール102と、低燃費走行指示取得モジュール104と、最大加速度低減モジュール106と、後行車情報取得モジュール108と、蓄電状態情報取得モジュール110と、駆動源切替モジュール112とを含む。
(もっと読む)
車両用走行制御装置

【課題】車速制限制御と車間制御を同時に行い得る車両用走行制御装置を提供する。
【解決手段】車両用走行制御装置1は、車両の走行速度を検出する車速センサ11と、乗員により設定された制限速度を記憶する記憶部17と、乗員のアクセル操作に関わらず走行速度が制限速度以下となるように車速制限制御を行う電子制御装置30と、車両に搭載され自車両の進行方向前方に存在する先行車両との車間距離および相対速度を検出するレーダ装置12と、車速センサ11の出力に基づいて制限車間距離を算出する制限車間距離算出部34と、レーダ装置12により検出された先行車両との車間距離が制限車間距離以下とならないように、車間距離が減少するにしたがって制限速度を減少させる制限速度を変更する制限速度変更部32と、を備える。
(もっと読む)
車両走行制御装置
【課題】車両がスタックなどをしても自動走行制御中に脱出するための操作を行うこと、あるいは車両の急発進および変速機にかかる負荷を抑制することの少なくともいずれかを実現できる車両走行制御装置を提供すること。
【解決手段】駆動トルクを車両Cに作用させるエンジン100を車両Cの車速Vが予め設定された目標車速Voとなるように制御することで自動走行制御を行う車両走行制御装置1において、シフトポジションを検出するシフトセンサ4を備え、シフトポジションがニュートラルポジションであることを検出すると、車両Cに作用する駆動トルクが0となるようにエンジン100を制御する。
(もっと読む)
機能制限解除装置及び車両
【課題】運転者がどこでも車両機能を制限されることなく車両を走行させてしまうことを抑制する。
【解決手段】ナビゲーションユニット2が、通常は車両の速度リミッターを初期設定値V0に設定し、車両位置が速度制限解除エリア内に位置すると判別された場合、エンジン制御ユニット3を制御することにより速度制限を解除する。これにより、車両が速度制限解除エリア内に位置する場合においてのみ速度制限が解除されるので、運転者がどこでも速度制限されることなく車両を走行させてしまうことを抑制できる。
(もっと読む)
車両走行制御装置
【課題】主走行状態検出手段に異常が発生することで、異常な目標制御量に基づいて車速調整装置が作動されることを抑制することができる車両走行制御装置を提供する。
【解決手段】車両走行制御装置1に、車輪速度センサ3の他に、車両の走行状態を検出する駆動系回転センサ7を設ける。また、エンジンECU9は、自動走行制御ECU8により自動走行制御を行っている際に、駆動系回転センサ7での検出結果に基づいて算出した車速Veが異常判定条件を満たした場合には、自動走行制御は行わずに、エンジン100の通常制御を行う。このように、エンジンECU9に、駆動系回転センサ7での検出結果に基づいた異常判定条件を設定することにより、車輪速度センサ3に発生した異常を検出することができる。この結果、車輪速度センサ3に異常が発生することで、異常な目標制御量に基づいてエンジン100が作動されることを抑制することができる。
(もっと読む)
車両走行制御装置
【課題】異常が発生することで、異常な目標制御量に基づいて車速調整装置が制御されることを抑制することができる車両走行制御装置を提供すること。
【解決手段】車両走行制御装置1−1では、自動走行制御ECU7において車速Vが予め設定された目標車速Voとなるように目標駆動力Foを算出し、エンジンECU8においてエンジンECU8に出力された目標駆動力Foに基づいてエンジン100を制御する。エンジンECU8は、運転者による制動操作を検出した場合、自動走行制御ECU7において予め設定された車速Vを低速目標車速Volとすることができる低速上限値FL2以下となるように算出された目標駆動力FoがエンジンECU8において予め設定された車速Vを低速目標車速Volとすることができる基準低速上限値FL2´を超えると判定する場合、目標駆動力Fo制御量に基づいた自動走行制御を行わない。
(もっと読む)
車両走行制御装置
【課題】自動走行制御を不可能にしてしまうような異常の検知
【解決手段】車両の車速の調整を行うエンジン100を目標制御量に基づいて制御する第1ECU(エンジンECU9)と、車速が目標車速となるように目標制御量を算出して第1ECUへと出力する第2ECU(自動走行制御ECU8)と、を備え、その第1ECUは、エンジン100の回転数又は発生する制御量が所定値を超えた際に目標制御量に基づくエンジン100の制御を禁止させるべき異常状態にあるとの判定を行う異常判定部(システム限界判定部91)を設けること。
(もっと読む)
車両走行制御装置
【課題】自動走行制御中に一部の車輪にスリップが発生することに起因する不具合を抑制できる車両走行制御装置を提供すること。
【解決手段】車両走行制御装置1は、車両が有する複数の車輪の回転速度を検出する車輪速度センサ3を有しており、さらに、車両の車速が目標車速となるようにエンジン100およびブレーキ装置200を制御する自動走行制御を行うと共に、車輪速度センサ3で検出する車輪の回転速度のうち少なくとも1つの車輪の回転速度がシステム限界判定速度αを超える場合にはエンジン100の出力を低減する制御を行う自動走行制御ECU8を備えている。これにより、自動走行制御中に一部の車輪にスリップが発生した場合でも、車輪の回転速度がシステム限界判定速度αを超える場合にはエンジン100の出力を低減させることができる。この結果、自動走行制御中に一部の車輪にスリップが発生することに起因する不具合を抑制することができる。
(もっと読む)
車両走行制御装置
【課題】運転者による制動操作があった場合に、車両を停止保持することができる車両走行制御装置を提供すること。
【解決手段】車両走行制御装置1では、自動走行制御ECU7において検出された勾配において車両を停止保持することができる勾配目標駆動力Foiおよび検出された車速Vが目標車速Voとなるように算出された基準駆動力から勾配目標駆動力Foiを引いた値であるフィードバック目標駆動力Fofを算出し、エンジンECU8に出力する。エンジンECU8は、算出された勾配目標駆動力Foiおよびフィードバック目標駆動力Fofの合計である目標駆動力Foに基づいてエンジン100を制御する。運転者による制動操作を検出した場合、自動走行制御ECU7が0以下のフィードバック目標駆動力FofをエンジンECU8に出力し、エンジンECU8が勾配目標駆動力Foi未満の目標駆動力Foに基づいてエンジン100を制御する。
(もっと読む)
車両用制御装置及び車両用制御システム
【課題】エンジン10のクランク軸12の回転力を自動変速装置14を介して駆動輪16へと伝達させる車両について、変速比の切り替え制御に伴い、その前後方向の実際の加速度を目標加速度によりフィードバック制御する制御性が低下すること。
【解決手段】実加速度と目標加速度とに基づき、比例積分微分演算によってフィードバック操作量が算出され、これに基づき、エンジン10及び自動変速装置14からなるパワートレインとブレーキアクチュエータ20とが操作される。自動変速装置14による変速比の切り替え制御中においては、比例項及び微分項を初期化するとともに、積分項を切り替え直前の値に保持する。
(もっと読む)
車速制限装置
【課題】無用な加減速が生じない車速制限装置を提供する。
【解決手段】車両の走行速度を検出する車速センサ11と、乗員により設定された制限速度を記憶する記憶部15と、乗員のアクセル操作に関わらず走行速度が制限速度以下となるように車速制限制御を行う電子制御装置20と、乗員の操作により車速制限制御を中断する中断スイッチ14と、乗員の操作により車速制限制御を再開する再開/増加スイッチ13と、を備えた車速制限装置1において、電子制御装置20は、再開/増加スイッチ13による車速制限制御再開時の走行速度が記憶部15に記憶されている制限速度よりも所定値以上大きく、且つ再開/増加スイッチ13による車速制限制御再開からの経過時間が判定時間未満の場合には、車速制限制御再開時の走行速度を仮の制限速度とし、この仮の制限速度に基づいて車速制限制御を実行する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 短時間のエンジン駆動を抑制し燃費の向上することができるハイブリッド車両の制御装置を提供すること。
【解決手段】 モード遷移予測手段によりモータ走行モード、ハイブリッド走行モード、モータ走行モードの順に遷移すると予測した場合には、モード切替手段によるモータ走行モードからハイブリッド走行モードへの切り替えを禁止するモード切替禁止手段とを設けた。
(もっと読む)
加速度制御装置
【課題】運転者の感覚に合った加速制御を簡易に行うことができる加速度制御装置を提供する。
【解決手段】運転者自身がアクセル操作して車両を加速させる場合、加速初期は加速度一定で加速し、切り替え速度以降は速度2乗微分値一定で加速すること、さらに、加速初期の加速度(G0)と切り替え速度以降において一定となる速度2乗微分値(C0)との間には線形関係があることを見出した。また、切り替え速度はC0とG0とから定まることも見出した。そこで、上記線形関係(図2)を記憶しておく。そして、この線形関係と目標初期加速度とを用いて目標速度2乗微分値を決定し、その目標速度2乗微分値から切り替え速度以降の目標加速度を決定する。また、切り替え速度を目標速度2乗微分値と初期加速度とから算出する。
(もっと読む)
車両の駆動力制御装置
【課題】車両の駆動力制御装置において、定速走行から車速を変更するときのトルク変化の追従性を上げることで制御性を向上すると共にドライバビリティを向上する。
【解決手段】ハイブリッド用電子制御ユニット20が、運転者のオートクルーズスイッチ52の設定操作に基づいて定速走行用の目標車速Vtを設定し、この目標車速Vtが設定されたとき、車速センサ51により検出された車速Vが目標車速Vtになるように要求トルクTrtを設定し、この要求トルクTrtが設定されたとき、この要求トルクTrtと車両が出力可能な正の最大トルクTramaxと負の最大トルクTrbmaxを用いて、運転者のアクセル操作またはブレーキ操作によるトルク指令値に対する要求トルクVrtを表す定速走行用トルクマップを設定し、トルク指令値に応じて定速走行用トルクマップを用いて要求トルクTrtを変更するように制御する。
(もっと読む)
車速制御装置及び車速制御プログラム
【課題】アクセルオーバライド状態の解除時に運転者に違和感を与えにくい減速制御を行うことが可能な車速制御装置を提供する。
【解決手段】車速制御装置は、車両の速度を設定速度に維持するための目標車軸トルクを演算し、演算した目標車軸トルクで車両を走行させる定速走行制御を行う。具体的には、設定速度と車両の走行に対する走行抵抗とに応じたフィードフォワード成分と、設定速度と車両の速度との偏差に応じたフィードバック成分とが含まれた駆動力を目標車軸トルクとして演算する。そして、定速走行制御中のアクセル操作により要求される要求駆動車軸トルクが目標車軸トルクを上回った場合には定速走行制御を中断し、要求駆動車軸トルクが目標車軸トルクを下回った時点で定速走行制御を再開する。
(もっと読む)
車速制限装置
【課題】制限速度を運転者の希望する値に容易に設定可能にする。
【解決手段】乗員により設定された制限速度を記憶する制限速度記憶部22と、自車両の走行速度が前記制限速度以下となるように制御する車速制御部23と、道路デ−タを記憶する道路データ記憶部12と、GPS受信器11で検出した自車両の位置および道路データ記憶部12に記憶された道路デ−タに基づいて自車両の道路位置を認識する道路位置認識部21と、を備え、制限速度記憶部22は、乗員により設定された制限速度と該制限速度が設定された自車両の道路位置とを対応させて記憶し、車速制御部23は、自車両が走行する道路位置に対応して制限速度が記憶されている場合には、自車両の現在位置に基づいて制限速度記憶部22に記憶された制限速度を選択し、この制限速度以下となるように自車両の走行速度を制御する。
(もっと読む)
車両用駆動力制御装置
【課題】先行車との相対的な位置関係に基づいて車両の駆動力を制御する場合に、運転者の感覚に合った駆動力制御を行うことが可能な車両用駆動力制御装置を提供する。
【解決手段】先行車との相対的な位置関係に基づいて車両の駆動力を制御する車両用駆動力制御装置であって、前記相対的な位置関係に基づいて算出された基準駆動力(Ta)に対して、前記先行車との間の相対車速と車間時間とに基づいて応答性を考慮した補正を行い、前記補正の結果として補正駆動力(Tb)を求める補正手段を備え、前記補正駆動力(Tb)に基づいて前記駆動力を制御する。
(もっと読む)
加速度制御装置
【課題】運転者の感覚にあった加速制御を簡易に行うことができる加速度制御装置を提供する。
【解決手段】速度2乗微分と環境因子αenvとの積が加速感覚値εとなることを示す式を変形することによって得られる目標加速度算出式を記憶しておく。そして、周辺環境監視装置106によって車両前方において車両周辺に存在する周辺物体12を実際に検出し、環境因子算出部110は、その検出した周辺物体12の位置を用いてから環境因子αenvを算出する。目標加速度生成部114は、環境因子αenvを用いて目標加速度算出式から目標加速度arefを逐次生成する。これによって、運転者の感覚にあった加速を行うことができ、しかも、事前に加速曲線を調整しておく必要がないことから、簡易に制御を行うことができる。
(もっと読む)
走行制御装置、走行制御システム
【課題】並列走行状態から縦列走行状態への移行が可能な走行制御装置、走行制御システム、を提供すること。
【解決手段】マスター車Mから送信される目標制御値に基づきマスター車Mと並列走行状態で隊列走行するスレーブ車Sの走行制御装置10であって、目標車速、及び、幅員方向における目標側方位置をマスター車Mから受信する受信装置21と、目標車速と当該スレーブ車Sの車速との車速偏差に基づき走行装置28,29の加速制御量又は減速制御量を決定する車間・車速制御部45と、目標側方位置と当該スレーブ車の側方位置との側方位置偏差に基づき操舵装置32の操舵制御量を決定する操舵量制御部46と、を有することを特徴とする。
(もっと読む)
車両走行制御装置
【課題】先行車両との安全性を確保すると共に、運転者に不快感を与えることなく発進することのできる車両走行制御装置を提供する。
【解決手段】停止中の車両が置かれている状況に合わせて、発進時の加速度の立ち上がり勾配を変化させる。すなわち、先行車両が緩やかに加速しながら発進する可能性の高い状況にあるときは、立ち上がり勾配を通常値に保つことによって先行車両と追突することを防止し、先行車両が急加速で発進する可能性の高い状況にあるときは、立ち上がり勾配を大きい値に設定することによって、速やかに加速し、先行車両から引き離されることを防止する。
(もっと読む)
161 - 180 / 506
[ Back to top ]