
Fターム[3G093DB01]の内容
車両用機関又は特定用途機関の制御 (95,902) | パラメータ、検出(機関以外) (18,896) | 回転数(回転速度) (1,537)
Fターム[3G093DB01]の下位に属するFターム
車輪の回転数(回転速度) (711)
Fターム[3G093DB01]に分類される特許
201 - 220 / 826
車両の制御装置
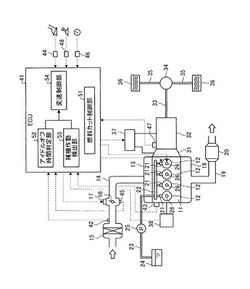
【課題】車両の制御装置において、車両の走行状態に拘らず燃料カット制御を適正に実行することで燃費の向上を可能とする。
【解決手段】エンジン11と自動変速機32を搭載し、ECU41として、エンジン11の回転数が予め設定された所定の燃料カット復帰回転数以上で且つアクセル開度が0のときに燃料供給を停止する燃料カット制御部51と、アクセルペダルが継続して踏込まれているアイドルオフ時間が予め設定された閾値より短いかどうかを判定するアイドルオフ時間判定部52と、エンジン11により駆動するエアコン38の作動を検出する補機作動検出部53と、車両の運転状態に応じて自動変速機32の変速段を設定すると共にアイドルオフ時間が閾値より短く且つエアコン38が作動するときに変速点を高回転側に変更する変速制御部54とを設ける。
(もっと読む)
無段変速機及びその制御方法

【課題】バリエータと副変速機構を有し、副変速機構の変速に合わせてバリエータの変速比を副変速機構の変速比の変化方向と逆に変化させる協調変速を行う無段変速機において、協調変速中にプーリへの供給圧が不足してもベルト滑りを抑制できるようにする。
【解決手段】変速機コントローラ12は、協調変速中、プーリへの供給圧が不足していると判断された場合、バリエータ20の伝達可能なトルクであるバリエータ伝達可能トルクをプーリへの供給圧とバリエータ20の変速比とに基づき演算し、バリエータ20の出力側から入力されるイナーシャトルクをバリエータ20の出力軸の回転速度変化に基づき演算する。そして、変速機コントローラ12は、バリエータ伝達可能トルクとイナーシャトルクとに基づきエンジン1の上限トルクを演算し、演算した上限トルクをエンジンコントローラに出力してエンジン1のトルクを規制する。
(もっと読む)
ハイブリッド車輌の制御装置
【課題】冷却装置の簡素化やモータの小型化を行ってコストダウンやコンパクト化を図りつつ、モータの保護も図ることが可能なハイブリッド車輌の制御装置を提供する。
【解決手段】エンジンEGの駆動回転によってモータMGが所定回転数以上で回転され、ゼロトルク制御手段21によりゼロトルクに制御されている場合にあって、モータMGの温度が温度上限閾値マップに基づく上限閾値以上となった際に、モータ保護制御手段40がエンジンEGの回転数を低下させる。即ち、モータMGの回転数が下げられ、ゼロトルク制御による発熱量が下がるので、モータMGの温度を下げることが可能となって、モータMGの保護が図られる。これにより、モータMGの冷却構造を高性能にしたり、モータMGを大型化したりすることを不要とし、ハイブリッド駆動装置HVのコストダウンやコンパクト化が図られる。
(もっと読む)
車両用駆動装置の制御装置
【課題】コースト走行中のダウンシフトに際して車両の減速度を速やかに得ることができる車両用駆動装置を提供する。
【解決手段】マニュアルパワーオフダウンシフトに際して、エンジン回転速度NEを一時的に上昇させるブリッピング制御手段70と、ブリッピング制御開始後に減少する入出力回転速度差△Nに基づいて、ロックアップクラッチ26を係合または半係合させるロックアップ制御手段72とを含むことから、タービン回転速度NTとエンジン回転速度NEとの差がロックアップ制御またはロックアップスリップ制御を安定に実行することができる値すなわち所定値Aよりも小さくされて上記各制御が安定に実行され、エンジンが非駆動状態となって十分なエンジンブレーキが得られるので、コースト走行中のダウンシフトに際して車両の減速度を速やかに得ることができる。
(もっと読む)
パワートレイン制御装置
【課題】油圧制御部に異常が発生し、変速比が大きくなって機関回転速度が上昇してしまったときに、変速比を小さくして内燃機関の過回転を抑制することのできるパワートレイン制御装置を提供する。
【解決手段】電子制御装置300は、第1制御バルブ217と、第2制御バルブ218と、フェールセーフバルブ219とを備える油圧制御部200を操作して無段変速機100における変速比を制御するとともに、内燃機関400のトルクを制御する。電子制御装置300は、第1制御バルブ217を通じて第1プーリ130に適切な量の作動油を供給することができなくなったときに、内燃機関400のトルクを低下させつつ、第2プーリ150における油圧を低下させるとともに、フェールセーフバルブ219を操作して第2制御バルブ218を通じて制御された作動油を第1プーリ130にも供給するように作動油の供給経路を切り替える過回転抑制制御を実行する。
(もっと読む)
燃料ポンプの制御装置
【課題】調量弁の作動に異常が生じている場合に、その異常の復旧を図った燃料ポンプの制御装置を提供する。
【解決手段】内燃機関の出力トルクにより駆動してコモンレール(蓄圧容器)へ燃料を圧送する高圧ポンプと、高圧ポンプへ吸入される燃料の量を調整する電気駆動式の調量弁と、を有して構成される燃料ポンプの制御装置において、コモンレール内の燃料圧力が目標圧力となるよう調量弁の作動を指令する制御指令信号を出力するECU(制御手段)と、調量弁の作動に異常が生じている旨を検出する異常検出手段と、を備え、ECUは、前記異常が検出されると、アイドルストップシステムによる自動停止に伴い高圧ポンプが停止しているポンプ停止期間中に、コモンレール内の燃料圧力とは無関係に調量弁を強制作動させる強制作動指令信号を出力する。
(もっと読む)
車両用動力伝達装置
【課題】車両走行時における機関の始動時にて、逆駆動トルクの伝達によるショックを緩和できる車両用動力伝達装置を提供すること。
【解決手段】この車両用動力伝達装置1は、トルクコンバータ2がステータ23の回転を許容または禁止するブレーキBsを有している。そして、車両走行時にて機関を始動させるときに、車速Vが所定の閾値V1より大きいときには、ブレーキBsがステータ23の回転を許容することにより機関を始動させる。また、車速が所定の閾値V2よりも小さいときには、第一モータ・ジェネレータ31が駆動トルクを発生して機関を始動させている。
(もっと読む)
自動車の熱エンジンのための自動始動/停止システムの再始動機能を制御する方法、およびその方法を実施する自動始動/停止システム
ハイブリッド型作業機械
【課題】複数の昇降圧コンバータがそれぞれ同時に蓄電器の充電又は放電を行なっても、過充電電流や過放電電流が流れないように昇降圧コンバータの出力を制御することのできるハイブリッド型作業機械を提供することを課題とする。
【解決手段】ハイブリッド型作業機械は、エンジン11に連結された電動発電機12と、電気負荷を駆動する複数の電動モータ21,30と、電動発電機及び電動モータが接続された複数のコンバータ100A,100Bと、複数のコンバータが接続された一つの蓄電器19と、蓄電器の充放電電流を制御する制御部120とを有する。制御部120は、蓄電器への充電電流又は蓄電器からの放電電流が予め設定された許容値を超えないように、電動発電機12の出力又は電動発電機12が接続されたコンバータ100Aの出力を制限することを特徴とするハイブリッド型建設機械。
(もっと読む)
段差乗り上げ判定装置
【課題】車輪の段差乗り上げの完了時点を高精度に判定することができる段差乗り上げ判定装置を提供する。
【解決手段】段差乗り上げ判定装置1は、4つの車輪の回転速度を検出する車輪速センサ7a〜7dと、トランスミッション4の出力軸の回転数を検出するT/M出力回転数センサ8と、段差乗り上げ判定ECU10とを備えている。段差乗り上げ判定ECU10は、車輪が段差を乗り上げ中であると判定されると、車輪速センサ7a〜7d及びT/M出力回転数センサ8の検出値に基づいて、全ての車輪の車輪速がゼロでなく且つトランスミッション4の出力軸の回転数がゼロでないかどうかを判断し、この条件が満たされたときは、車輪の段差乗り上げが完了したと判定する。
(もっと読む)
動力伝達装置の制御装置
【課題】非等パワー変速におけるドライバビリティの低下を防ぐことを課題とする。
【解決手段】動力伝達装置の制御装置は、原動機と、電動機と、有段変速部と、前記電動機により差動状態が制御される無段変速部と、を有する車両用の動力伝達装置に適用される。動力伝達装置の制御装置は、例えばECU(Electronic Controlled Unit)により実現される制御手段を備える。制御手段は、有段変速部の変速を行う際に、非等パワー変速を行うことが可能であり、車両の運転状況に基づいて、非等パワー変速を行う際における変速速度を変化させる。
(もっと読む)
ハイブリッド車両
【課題】ハイブリッド車両で、バッテリの充電可能電力Winが低い場合でもシフトダウンの際にメリハリのある運転感覚を得る。
【解決手段】
エンジン12と、モータジェネレータ16,20と、二次電池40と、エンジン回転数制御部97とを含むハイブリッド車両10であって、エンジン回転数制御部97は、各シフト段における車速に対するエンジンの下限回転数を設定エンジン下限回転数として設定し、車速と運転者の設定したシフト段とに応じてエンジン12の回転数を設定エンジン下限回転数以上となるようにエンジン12の回転数を変化させるエンジン回転数変化手段と、二次電池40への充電可能電力を計算する充電可能電力計算手段と、計算充電可能電力が小さくなるに従って、各シフト段における車速に対する設定エンジン下限回転数を大きくする設定エンジン下限回転数変更手段と、を有する。
(もっと読む)
車群走行制御装置
【課題】通信エラーが生じている期間も追従車が先導車に追従する走行制御を行うことができる車群走行制御装置を提供する。
【解決手段】先導車は、先導車走行計画決定部104で、今後の自車両の走行制御値を示す先導車走行計画を決定し、走行計画送信処理部106では、その先導車走行計画を無線機30から送信する。これにより、先導車は、今後の自車両の走行制御値を事前に送信することになる。追従車はこの先導車走行計画を受信する。追従車は、通信エラーにより先導車走行計画が一時的に受信できない場合が生じても、その通信エラーが生じた時点において先導車が行う走行制御値を事前に受信している。そのため、通信エラーが生じている期間も追従車は先導車に追従する走行制御を行うことができる。
(もっと読む)
車両の制御装置
【課題】車体の加速時振動の発生時期を正確に予測し、ひいてはその抑制に係る制御を最適なタイミングで実行可能とすることのできる車両の制御装置を提供する。
【解決手段】電子制御ユニット1は、被駆動状態から中立状態への切り替わりに伴うエンジン2及びトランスアクスルの姿勢変化に起因したギャップセンサー4によるトランスアクスル出力軸の回転速度検出値の変動の確認に応じて、車体の加速時振動の発生時期を予測し、エンジン2のトルクダウンを実施する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンの始動時での振動を低減することが可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、エンジンと、回転電機と、制御手段と、を備える。回転電機は、エンジン停止中のクランク角を調整するための動力を出力する。制御手段は、エンジンの始動開始前に、回転電機により、クランク角を、所定の目標クランク角範囲に属するように変更する。
(もっと読む)
ハイブリッド駆動装置
【課題】車両発進の際の内燃機関の引き摺りを低コストに回避しつつ、回転電機の故障時においても適切に車両を発進させることができ、更に車両発進時におけるドライバビリティを良好に維持することが可能なハイブリッド駆動装置の実現。
【解決手段】回転電機及び入力クラッチを介して内燃機関に駆動連結される入力部材と、伝達発進用係合要素を有し、入力部材の回転を変速して出力部材にする変速装置と、入力部材により駆動されるオイルポンプと、制御装置と、を備えたハイブリッド駆動装置。入力クラッチは、複数の摩擦材とこれらを押圧する方向に付勢する弾性部材とを有する。制御装置は、運転者による発進予備操作を検出したとき、回転電機を回転させて、オイルポンプにより弾性部材の付勢力を相殺して入力クラッチを解放させる循環油圧を発生させ、入力クラッチの解放後に発進用係合要素を係合させる。
(もっと読む)
車両駆動システムの制御装置
【課題】エンジンの動力をクラッチと変速機を介して車輪側に伝達する車両において、エンジンの自動停止中に車両のずり下がりを防止できるようにする。
【解決手段】エンジン11の自動停止時に変速機13を所定の変速段(例えば1速ギヤ)に切り換えた状態に維持すると共にクラッチ12を係合状態に維持するヒルホールド制御を実行する。これにより、エンジン11から車輪16までの動力伝達系を連結した状態に維持することができ、エンジン11が自動停止されて車両が坂道で停止した場合でも、エンジン11のフリクションによって車輪16の回転を防止して車両のずり下がりを防止する。この場合、エンジン11の自動停止を禁止する必要がないため、自動停止始動制御による燃費向上効果を確保できると共に、車両のずり下がりを防止するためのブレーキ液圧保持装置等を設ける必要がないため、低コスト化の要求を満たすことができる。
(もっと読む)
発進クラッチ制御装置
【課題】 登坂発進時など連続ストール状態が継続することによるクラッチの劣化と、燃費の低下を防止することができる発進クラッチ制御装置を提供する。
【解決手段】 発進クラッチの駆動軸と被駆動軸との回転数の差、及びクラッチに作用する圧力に基づいて、累積仕事量を算出する。発進クラッチが締結過渡状態にあって前記累積仕事量が第1の所定値を超えたときに、エンジンの出力トルクを制限する。
(もっと読む)
車両制御システム
【課題】自動的に動力源の運転を停止および再開させる場合の燃費の向上を図ることができる車両制御システムを提供すること。
【解決手段】車両の動力源が車両の駆動輪によって回転駆動されるときの駆動輪に作用する動力源による負荷の大きさを変更可能な負荷変更手段と、負荷変更手段を制御する制御装置とを備え、制御装置は、車両の走行時に動力源による動力の発生を停止させる動力源停止制御を実行可能であり、制御装置は、動力源停止制御が実行され、かつ動力源が駆動輪によって回転駆動されている間に、運転者による制動操作の終了が検出され、制動操作の終了の検出後に運転者による加速操作の開始が検出された(S1−Y)ときに、制動操作の終了から加速操作の開始までの経過時間が予め定められた所定時間以上である(S2−Y)と、動力源による動力の発生を再開させることなく、負荷変更手段によって負荷の大きさを減少させる(S3)。
(もっと読む)
エンジン自動停止始動制御装置
【課題】自律復帰制御による再始動が失敗したとしても、その後ピニオンをリングギヤにスムーズに噛み込ませることができるようにする。
【解決手段】エンジン回転速度が第1回転速度領域で再始動要求された場合、クランキングを行わずに燃料噴射を再開して再始動させる自律復帰制御手段と、エンジン回転速度が第2回転速度領域で再始動要求された場合、ピニオンの回転速度をリングギヤの回転速度に同期させた後にピニオンをリングギヤに噛み合わせて再始動させる先回し制御手段と、エンジン回転速度が第3回転速度領域で再始動要求された場合、ピニオンをリングギヤに噛み合わせた後でピニオンを回転させて再始動させる先出し制御手段とを備え、自律復帰制御による再始動失敗が検出された場合には、その失敗検出時点から所定時間Tbが経過するまでは先回し制御を禁止する(S204)とともに、所定時間Tbが経過した時点で先出し制御を実施する(S205)。
(もっと読む)
201 - 220 / 826
[ Back to top ]