
Fターム[3G093DB01]の内容
車両用機関又は特定用途機関の制御 (95,902) | パラメータ、検出(機関以外) (18,896) | 回転数(回転速度) (1,537)
Fターム[3G093DB01]の下位に属するFターム
車輪の回転数(回転速度) (711)
Fターム[3G093DB01]に分類される特許
121 - 140 / 826
車両制御システム及び車両用制御装置
【課題】適正にショックを抑制することができる車両制御システム及び車両用制御装置を提供することを目的とする。
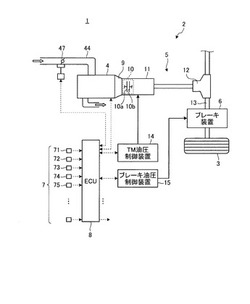
【解決手段】車両制御システム1は、車両2の駆動輪3に作用させる動力を発生する内燃機関4と、内燃機関4側の回転部材10aと駆動輪3側の回転部材10bとを動力伝達可能に係合した状態と係合を解除した状態とに切り替え可能である係合装置10と、加速要求操作が解除され内燃機関4の燃焼室45への燃料の供給がカットされた機関ブレーキ状態で、加速要求操作がなされた際に、当該加速要求操作の操作量に応じた燃焼室45への吸気通路44の開度が機関ブレーキ状態での開度より小さくなる場合に、係合装置10を制御して係合を解除した状態とすると共に、内燃機関4を制御して開度を機関ブレーキ状態での開度以上で保持する車両用制御装置8とを備えることを特徴とする。
(もっと読む)
内燃機関の制御装置

【課題】ロックアップクラッチの作動に対して内燃機関の制御が遅れることなく、車両を円滑に加速させること。
【解決手段】制御装置1は、アクセル操作に伴う車両Vの加速時に、アクセル操作に伴う内燃機関3の目標出力を、内燃機関の出力変化量が所定速度となるように、規制する手段を備える。その規制手段は、加速時におけるロックアップクラッチ7の目標作動圧力と、車両の加速の直前におけるロックアップクラッチの作動圧力の実測値もしくは目標値またはロックアップクラッチの制御状態とに基づいて、所定速度を設定する規制値設定手段を有する。
(もっと読む)
内燃機関の失火検出装置
【課題】ハイブリッド型パワーユニットの発電動機が内燃機関の補助駆動を行っている最中でも、失火誤検出を抑制できる失火検出装置を提供する。
【解決手段】内燃機関を補助的に駆動可能な発電動機と、この発電動機の制御トルクを検出可能なトルク検出手段とを備えたハイブリッド型パワーユニットの内燃機関の失火検出装置において、発電動機により補助的に駆動されている状態下の内燃機関の回転角速度を合成駆動角速度として検出可能な角速度検出手段を設け、発電動機の制御トルクから発電動機駆動成分の角速度変化量を算出し、合成駆動角速度と発電動機駆動成分の角速度変化量とに基づいて内燃機関駆動成分の角速度変化量を算出し、この内燃機関駆動成分の角速度変化量に基づいて失火判定を行う。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】内燃機関を停止させる際に蓄電手段の状態に拘わらずクランクシャフトの停止位置が予め定められた目標停止範囲内に含まれるようにする。
【解決手段】エンジン22の運転を停止させる際にバッテリ50の残容量SOCが判定閾値Sref以上であってバッテリ50の残容量SOCが必要最小限に確保されている場合にはクランクシャフト26の停止位置が目標停止範囲内に含まれるようにモータMGが制御され(ステップS150)、エンジン22の運転を停止させる際にバッテリ50の残容量SOCが判定閾値Sref未満であってバッテリ50の残容量SOCが低下している場合にはクランクシャフト26の停止位置が目標停止範囲内に含まれるように動弁機構28が制御される(ステップS160)。
(もっと読む)
車両の統合制御装置
【課題】たとえ、アクセル操作に対してエンジンに発生させる駆動力特性として複数のモードを備えた車両であっても、各モードの違いを十分に発揮しながら、それぞれのモードにおいて最適な燃費を実現する。
【解決手段】統合_ECU22には、エンジン1の複数のモードに応じたそれぞれ異なるエンジンの燃料消費に係る特性(エンジンの燃料消費率マップ)を予め記憶して、予め設定した運転条件が成立する場合に、燃費優先制御を実行すべく、現在選択されているモード(M1、M2、M3の何れか)に対応するエンジンの燃料消費率マップに基づいて、現在のエンジンの運転状態よりも燃費が向上するエンジンの運転状態を選択し、該選択したエンジンの運転状態に基づいて、エンジン1と無段変速機3の少なくとも一方を制御する。
(もっと読む)
車両の制御装置
【課題】燃費率が悪化しない領域でオルタネータを作動させることで、オルタネータの作動領域を拡大できる車両の制御装置を提供する。
【解決手段】エンジントルクとエンジン回転数とに基づく燃費率マップと最適燃費線とを予め記憶し、エンジン駆動状態からオルタネータの非作動状態における燃費率マップ上の現状位置を推定し、推定現状位置が最適燃費線よりも低トルク領域側にある場合に、推定現状位置と最適燃費線との間のトルク差であるトルク差ΔTを求め、トルク差ΔTに応じてトルクアップ手段によりエンジントルクを増加させる。トルク差ΔTがオルタネータの最大負荷トルクTaより小さいとき、オルタネータの作動を禁止し、トルク差ΔTが前記オルタネータの最大負荷トルクTaより大きいとき、オルタネータの作動を許可する。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、内燃機関への燃料供給停止時の回転数低下によるトルク変動を抑制すると共に作動流体の供給不足を抑制する。
【解決手段】エンジン11と、ロックアップ機構19を有するトルクコンバータ12と、自動変速機14とを駆動連結し、自動変速機14の駆動に同期して作動するオイルポンプ43を設け、ECU31は、エンジン11への燃料供給が停止しているとき、自動変速機14の出力軸回転数がエンジン11のトルク変動を考慮して設定された所定回転数を下回ったときにロックアップ機構19を開放する。
(もっと読む)
内燃機関の制御装置
【課題】自動変速機のN制御の際のエンジン回転数のふらつき、ショックを抑止することができる。
【解決手段】シフトポジションが走行レンジのまま車両が停車したときに、トルクコンバータのタービンランナと車軸とを断接切換するクラッチに供給する油圧を所定量開放して当該クラッチを滑らせるN制御を実施するものにおいて、N制御の開始後、エンジン回転数とタービンランナの回転数との差を検出し、その回転数差が所定値未満となったことを条件としてエンジン出力を低減させるための処理を行うこととした。
(もっと読む)
ハイブリッド電気自動車の充放電制御装置
【課題】車両停車中にゼロトルク制御が行われたときにSOC維持制御を適切に実行でき、もってバッテリのSOCを所定許容範囲内に保持することによりエネルギ効率が悪い強制充電や強制放電の実行を回避できるハイブリッド電気自動車の充放電制御装置を提供する。
【解決手段】PレンジまたはNレンジでの車両停車中においてゼロトルク制御を実行していないときには(S10がNo)、クラッチC1及びクラッチC2を切断状態に保持して油圧ポンプ駆動のためのエンジン負荷を軽減する一方(S12)、ゼロトルクを実行中のときには(S10がYes)、電動機3側のクラッチC2のみを接続状態に切り換え(S16)、SOC維持制御を実行してバッテリ5のSOCを所定許容範囲内の中央値である50%近傍の狭い制御幅内で変動させる(S18)。
(もっと読む)
ドライブシャフト保護装置および方法
【課題】
ドライブシャフトに損傷を発生させる可能性のある運行条件において、車両のレイアウトおよび車両特性を変更せずにドライブシャフトを保護する。
【解決手段】
現在選択された変速段が後進変速段であるか否かを判断する段階と、変速段が後進変速段であれば、現在の操向角がフル操舵の状態であるか否かを判断する段階と、操向角がフル操舵の状態であれば、変速機のストール発生条件が満たされているか否かを判断する段階と、変速機のストール発生条件が満たされていれば、エンジンの出力トルクを低減してドライブシャフトに加えられるトルクが限界トルク未満となるように制御する段階と、を含むことを特徴とするドライブシャフト保護方法。
(もっと読む)
ハイブリッド自動車
【課題】二次電池の温度が低いときにその蓄電割合が過剰に高くなるのを抑制する。
【解決手段】電池温度Tbが所定温度未満のときに、電池温度Tbが所定温度以上のときに比してモータからの動力だけを用いて走行する電動走行が行なわれにくくなると共にエンジンからの動力とモータからの動力とを用いて走行するハイブリッド走行が行なわれやすくなるものにおいて、バッテリの蓄電割合SOCに応じて蓄電割合調整用パワーPbsocを設定し(S300)、電池温度Tbが所定温度未満のときに所定温度以上のときに比して小さな値を嵩上げパワーPbηに設定し(S310)、これらの和をバッテリの充放電用パワーPb*に設定する(S320)。そして、ハイブリッド走行によって走行するときには、充放電用パワーPb*を走行用パワーに加えたパワーがエンジンから出力されながら走行するようエンジンと二つのモータとを制御する。
(もっと読む)
ハイブリッド自動車
【課題】電動機に接続されたギヤ機構での異音の抑制と内燃機関の運転効率の低下の抑制との両立を図る。
【解決手段】効率優先運転ポイントでエンジンが運転されると共に要求トルクTr*が駆動軸に出力されるようエンジンと二つのモータとを制御すると第2モータから出力されるトルクが異音トルク範囲内となるときには(S170)、異音抑制動作ラインと要求パワーPe*とを用いて得られる第1仮運転ポイントと(S180)、第2モータから出力されるトルクが異音トルク範囲の上限よりも大きくなると共に要求パワーPe*がエンジンから出力されるよう設定される第2仮運転ポイントと(S190)、のうち回転数が小さい方の運転ポイントでエンジンが運転されると共に要求トルクTr*が駆動軸に出力されるようエンジンと二つのモータとを制御する(S200〜S270)。
(もっと読む)
ハイブリッド自動車
【課題】二次電池の蓄電割合の管理の様子を運転者が把握できるようにする。
【解決手段】エンジンから出力される動力とモータから入出力される動力とを用いて走行するハイブリッド走行によって走行するときには、バッテリの蓄電割合SOCが目標割合SOC*に近づくと共に要求トルクによって走行するようエンジンと二つのモータとを制御する。そして、このときには(S710)、バッテリの蓄電割合SOCを示す蓄電割合情報と目標割合SOC*を示す目標割合情報とをディスプレイ90に表示する(S730)。これにより、蓄電割合情報と目標割合情報とを運転者が把握できるようにすることによってバッテリの蓄電割合SOCの管理の様子を運転者が把握できるようにすることができる。
(もっと読む)
車両用駆動装置の制御装置
【課題】エンジンからの動力を駆動輪へ出力し差動用電動機により差動状態が制御される差動機構を備えた車両用駆動装置において、車両のスリップ時にも非スリップ時にもエンジンの駆動制御を適切に行うことができる車両用駆動装置の制御装置を提供する。
【解決手段】ハイブリッド制御手段86は、基本的には、出力回転部材19の実回転速度である差動部実出力回転速度に基づいてエンジン8を制御する。そして、車両6のスリップ時には、上記差動部実出力回転速度に替えて、実際の車速Vに対応する車速基準出力回転速度に基づいてエンジン8を制御する。従って、上記スリップ時にエンジンパワーが不必要に大きくならないようにエンジン8の駆動制御を適切に行うことができる。また、基本的にはエンジン8は出力回転部材19の実回転速度に基づいて制御されるので、車両6のスリップ時以外でもエンジン8の駆動制御を適切に行うことができる。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】前輪と後輪とを別々のモータで駆動する構成においてモータの発熱を的確に抑制しつつて走行安定性を確保する上で有利なハイブリッド電気自動車の制御装置を提供する。
【解決手段】フロントモータ18、リアモータ20のうち、一方のモータに分配される駆動トルクTrq1が一方のモータの基準トルクを超過したと判定された場合、他方のモータで駆動される車輪にスリップの発生が否と判定されたときに、一方のモータに分配される駆動トルクTrq1を基準トルクより低減させると共に他方のモータに分配される駆動トルクTrq2を増大させて要求トルクを満足させる。他方のモータで駆動される車輪でのスリップの発生が有と判定され、かつ、エンジンにより駆動される車輪と一方のモータにより駆動される車輪とが同じ車輪である際に、駆動トルクTrq2の増大を禁止して、エンジンに分配される駆動トルクを増大させて要求トルクを満足させる。
(もっと読む)
エンジン自動停止再始動装置
【課題】エンジン再始動時におけるピニオンギアとリングギアの噛合をスムーズに行い、静粛性と耐久性に優れたエンジン自動停止再始動装置を得る。
【解決手段】エンジン自動停止判定手段(101)によりエンジン自動停止条件が成立した際に、燃料噴射制御手段(105)による前記エンジンへの燃料供給を停止し、点火制御手段(106)によるエンジンへの点火を停止した後に、エンジンが停止する前に、エンジン再始動判定手段(102)によりエンジン再始動条件が成立した場合には、ピニオンギアを回転駆動させ、エンジン回転数演算手段(104)により検出されたエンジン回転数と、ピニオンギア回転数との偏差が所定閾値未満となることで、リングギアとピニオンギアの噛合を開始させるとともに、噛合を開始してから噛合完了判定手段(103)により噛合完了と判定されるまでの期間は、点火制御手段(106)による点火を禁止させる。
(もっと読む)
車両の制御装置
【課題】エンジンとトランスミッションとをクラッチを介して連結するとともに、フライホイールにトーショナルダンパを設けた車両の制御装置において、エンジンの被駆動状態でのエンジンのオーバーラン発生の判定精度を向上可能にする。
【解決手段】制御装置100は、エンジン1が被駆動状態のときに、所定のクランク角CAでのエンジン回転速度Neの瞬時速度がトランスミッション2の入力軸回転速度Niの瞬時速度より大きいか否かを判定する第1判定手段と、この第1判定手段により大きいと判定した場合に、エンジン1がオーバーランしていると判定する第2判定手段とを備えている。
(もっと読む)
車両の制御装置
【課題】エンジン1とトランスミッション2とをクラッチ3を介して連結するとともに、フライホイール7にトーショナルダンパ8を設けた車両の制御装置100において、エンジン1が駆動状態または被駆動状態であっても、エンジン1のオーバーラン発生を精度良く検出可能にする。
【解決手段】制御装置100は、所定のクランク角でのエンジン回転速度の瞬時速度とトランスミッション2の入力軸回転速度の瞬時速度との差によりエンジン1の出力トルクを推定する推定手段と、この推定手段による推定結果が指令トルクより大きい場合に、エンジン1がオーバーランしていると判定する判定手段とを備えている。
(もっと読む)
車両用走行制御装置
【課題】コースト状態においてエンジンの始動と変速の制御とをより適切に行うこと。
【解決手段】駆動源となるエンジンおよびモータと、駆動源からの駆動力を異なるギヤ比で車輪に伝達する変速機と、エンジンの始動を制御するエンジン始動制御手段と、変速機の変速を制御する変速制御手段と、自車両がモータのみを駆動源として走行し、かつ、コースト状態であるときに、エンジンの始動要求と変速機の変速要求とが発生しているか否かを判定する始動判定手段と、を備え、始動判定手段が、自車両が前記モータのみを駆動源として走行し、かつ、コースト状態であるときに、エンジンの始動要求と変速機の変速要求とが発生していると判定した場合に、エンジン始動制御手段は、変速制御手段が現在の変速段から目標変速段に掛け替えを完了するまでエンジンの始動を禁止し、該掛け替えの完了後に、エンジンを始動させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジントルクばらつきがあるような場合でも、エンジン回転数変動を抑制しつつ所望の発電量を実現することである。
【解決手段】統合コントローラ20は、モータ回転数制御を行いつつモータジェネレータにより発電を行う場合には、min{(モータ下限トルク+エンジントルクばらつき),0}<目標発電トルク<max{(モータ上限トルク−エンジントルクばらつき),0}で示される関係式の範囲に設定する。そして、統合コントローラ20は、この関係式が成立しないことを条件に、モータ回転数制御からエンジン回転数制御に切り替える。
(もっと読む)
121 - 140 / 826
[ Back to top ]