
Fターム[3H089AA28]の内容
流体圧回路 (27,807) | 制御形態及び制御回路 (3,713) | 流量、速度、角速度の制御 (851) | 一定速度制御(ロードセンシング回路を含む) (185) | 温度変化にかかわらず定速 (7)
Fターム[3H089AA28]に分類される特許
1 - 7 / 7
電気モータ制御装置
【課題】固定容量型のポンプを使用しつつ、レバーの操作量に応じた速度でアクチュエータを駆動する。
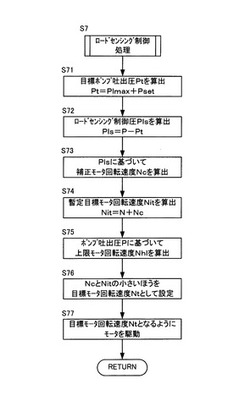
【解決手段】電気モータの回転速度を制御する電気モータ制御装置であって、ポンプの吐出圧が最高負荷圧よりも所定の設定圧だけ高くなるように、最高負荷圧に基づいて電気モータの暫定目標回転速度を算出し(S74)、ポンプの吐出圧に基づいて、電気モータの出力トルクがその吐出圧のときに出力可能な最大トルクとなる電気モータの回転速度を上限回転速度として算出し(S75)、暫定目標回転速度と上限回転速度とのうち、低いほうを電気モータの目標回転速度として算出し(S76)、電気モータの回転速度が目標回転速度となるように、電気モータの回転速度を制御する(S77)ことを特徴とする。
(もっと読む)
油圧駆動システム

【課題】チャージポンプでのエネルギーロスを低減する油圧駆動システムを提供する。
【解決手段】油圧駆動システム1において、作動油流路15はメインポンプ10と油圧アクチュエータ14を接続すると共に、閉回路を構成する。チェック弁44,45はメインポンプと油圧アクチュエータとの間に配置される。第1油圧調整部43は作動油流路の油圧が所定の第1設定圧を超えないように調整する。チャージ流路35はメインポンプとチェック弁との間に接続される。チャージポンプ28はチャージ流路に作動油を吐出する。第2油圧調整部42はチャージ流路に接続され、チャージ流路の油圧が第1設定圧よりも小さい第2設定圧を超えないように調整する。流路開閉部41a、41bはチャージ流路から作動油流路への作動油の流れを許容し、作動油流路からチャージ流路への作動油の流れを禁止する。アキュムレータ38は、チャージ流路に接続される。
(もっと読む)
装置
【課題】ガスが充填されたチャンバを有するエネルギ回収シリンダを備えた装置の機能を改良する。
【解決手段】少なくとも1つのワーキングドライブ1を介して可動な可動部材2を有する、エキスカベータ、または部材のハンドリングのための機械であって、可動部材の動きからのエネルギ回収のために、ガスが充填されたチャンバを含む少なくとも1つのエネルギ回収シリンダ3が設けられ、装置の作動が、直接的に、または間接的に決定された、ガスが充填されたチャンバ内のガスの温度に依存して、制御される。
(もっと読む)
油圧ジャッキの回路構造
【課題】絞り弁を使用することなく電気的制御により行うことができ、しかも、揚重物の吊り下げ時の油圧エネルギを電気エネルギとして有効に回収することができる、油圧ジャッキの回路構造を提供する。
【解決手段】油圧シリンダ3を備え、油圧シリンダ3の下室3aに作動油を供給して、ピストンロッド2を伸長させることにより揚重物Wを吊り上げ、油圧シリンダ3の上室3bに作動油を供給して、ピストンロッド2を収縮させることにより揚重物Wを吊り下げる、油圧ジャッキの回路構造において、揚重物Wの吊り下げ時において、下室3aから排出される作動油により回転する発電機17と、発電機17により発電された電気エネルギを蓄えるキャパシタ18と、キャパシタ18の容量を調整することにより、発電機17の発電負荷を変化させて、揚重物Wを一定速度で下降させる定速コントローラ19とを備えている。
(もっと読む)
油圧制御装置
【課題】 使用状況や使用環境が変化しても制御特性が変化しない油圧制御装置を提供する。
【解決手段】 流量制御機構FはサブスプールSSが中立位置にあるとき、第1制御部aを開状態に維持し、第2制御部bを閉状態に維持する。パイロット通路6をパイロット圧力源に連通させると、第1圧力室22にはパイロット流れに対してオリフィス27の上流側の圧力が、第2圧力室23にはオリフィス27の下流側の圧力が作用し、この圧力差に応じて移動するサブスプールSSの位置によって、第2制御部bが第2連通路20を連通または遮断する。パイロット通路6をタンクに連通させると、第1圧力室22にはパイロット流れに対してオリフィス27よりも下流側の圧力が、第2圧力室23にはオリフィス27よりも上流側の圧力が作用し、この圧力差に応じて移動するサブスプールSSの位置によって、第1制御部aが第1連通路19の連通開度を制御する。
(もっと読む)
建設機械の走行モータ制御装置
【課題】 暖気運転後の走行開始時に走行モータのヒートバランスが崩れてしまうことを抑制し、熱膨張差が生じてしまうことによる作動不良や故障の発生を抑制する。
【解決手段】 建設機械の上位体と下位体との間に配置されるスイベルジョイント11を介してポンプ及びタンクに接続される走行モータ20と、その接続状態を切り換えてモータ20を制御するモータ制御弁21とを備える。モータ制御弁21は中立位置21aと正転位置21bと逆転位置21cとを有する。電気式リモコン22からの信号と走行モータ流入側圧力の検出器23による検出信号とに基づいて制御部24により電油弁25が制御されてパイロット圧が発生する。モータ制御弁21は、下位体に配置されるとともにモータ20に対して一体的に形成される。暖機運転の際は、ポンプから吐出された圧油がスイベルジョイント11とモータ制御弁21とを介して上位体にあるタンクに循環される。
(もっと読む)
作動液の流れを制御するシステム及び方法
【課題】 作動液の流れを制御するシステム及び方法を提供する。
【解決手段】 作業機械における作動液を流す方法が開示されている。本方法は入力機構から制御信号を発生させるステップ、及び作動液の粘度を示す特性信号を発生させるステップを含む。制御信号及び特性信号は制御モジュールで受信される。本方法はまた制御信号に対する所望の流量を決定するステップ、及び制御信号に対する所望の流量を達成するために要求される弁制御信号を決定するステップを含む。弁制御信号は特性信号に基づいている。弁制御信号はコマンド信号に対する所望の流量を、弁を通して供給するために比例弁に出力される。
(もっと読む)
1 - 7 / 7
[ Back to top ]