
Fターム[3J102CA25]の内容
その他の軸受(磁気軸受、静圧軸受等) (9,013) | 目的又は効果 (1,371) | 磁気軸受固有の目的、効果(磁気軸受のみ) (138) | 負荷変動に対応した制御 (16)
Fターム[3J102CA25]に分類される特許
1 - 16 / 16
磁気軸受装置
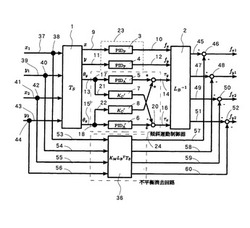
【課題】回転体の磁気軸受装置において、その各電磁石の容量を自由に設計でき、負荷容量を過不足なく設定できる磁気軸受装置を提供する。
【解決手段】回転体の磁気軸受において、回転体の並進運動を制御する並進運動制御回路23と、該回転体の傾斜運動を制御する傾斜運動制御回路24を具備する磁気軸受制御装置において、ラジアル電位センサ部の信号を入力として、ラジアル電磁石のx、y方向の力に作用する不平衡消去回路36を並列接続した。
(もっと読む)
磁気軸受及びそれを用いた圧縮機

【課題】磁気軸受において、制御電流と合成電磁力の線形性を保ちつつ、電磁石のコイルで消費する電力を低減できるようにする。
【解決手段】複数の電磁石(24)を有し、負荷(Ld)が変動する駆動軸(13)に、該複数の電磁石(24)の合成電磁力(F)を付与するステータ(21)を設ける。負荷(Ld)とは逆方向の電磁力を発生する電磁石(24)のコイル(23)に流す第1コイル電流(IU)(上側コイル電流)と、負荷(Ld)と同方向の電磁力を発生する電磁石(24)のコイル(23)に流す第2コイル電流(IL)(下側コイル電流)との電流差を制御して駆動軸(13)の位置制御を行う制御部(30)を設ける。制御部(30)では、第2コイル電流(IL)の平均値が低下するように、第2コイル電流(IL)を逐次調整する。
(もっと読む)
スピンドルモータ
【課題】本発明は、スピンドルモータに関する。
【解決手段】本発明によるスピンドルモータは、回転軸と、前記回転軸を収容して回転可能に支持する軸受と、軸受が内部に取付けられる軸受ホルダと、前記軸受ホルダの外径に積層されて取付けられたコア及び前記コアに巻線されたコイルからなる電機子と、前記電機子との電磁気力により回転するように、内部に磁石が取付けられ、前記回転軸の外径に取付けられるロータケースと、前記ロータケースに対向するように前記電機子または前記軸受ホルダに選択的に取付けられ、吸引力により前記ロータケースの浮上及び離脱を防止する電磁石と、を含むことを特徴とする。
(もっと読む)
磁気浮上装置
【課題】 変位吸収機構を有する磁気浮上装置において異なる方向から磁力を作用させる際に、装置の大型化を伴うことないく磁石ユニットおよび可動枠を構成できる磁気浮上装置を提供することにある。
【解決手段】
強磁性体を備えた浮上体2と、その外周に備えられる永久磁石および電磁石と浮上体2で磁束の磁気回路を形成する磁石ユニット11と、浮上体2に異なる方向から電磁力が作用するように複数の磁石ユニット11を固定する可動枠6、7と、可動枠6、7を、ばねを介して支持する固定枠3と、固定枠3と磁石ユニット11間の距離の調整機能を有する可動枠支持手段と、電磁石の励磁電流をゼロに収束させながら、浮上体2の磁石ユニット11からの非接触支持状態を維持する制御手段と、磁石ユニット11は、可動枠6、7の、磁石ユニット11が浮上体2の所定の軸に直行する平面上に配置されている磁気浮上装置。
(もっと読む)
真空ポンプ
【課題】ポンプ運転中にハイレベル信号およびローレベル信号の生成が不安定になるのを未然に防止することができる真空ポンプの提供。
【解決手段】真空ポンプは、ロータと一体に設けられたセンサターゲットと、そのターゲット面とのギャップ変化に応じたセンサ信号を出力するインダクタンス式の回転センサと、センサ信号の電圧レベルとHigh-Low判定用の閾値VL,VHとを比較して、凹凸段差に対応したローレベル信号およびハイレベル信号を生成する回転センサ回路とを備える。電源投入時に、ロータを複数の回転角度位置に順に停止させ、複数の角度位置の少なくとも一つにおいて、センサ信号の電圧レベル(VU〜VW)が判定閾値VL以下となり、かつ、他の角度位置の少なくとも一つにおいて、電圧レベル(VU〜VW)が判定閾値VH以上となる場合に、センサ信号は正常であると判定し、それ以外の場合には異常であると判定する。
(もっと読む)
真空ポンプ
【解決手段】本発明は、真空ポンプ、特にターボ分子ポンプに関しており、真空ポンプは軸(12)に支持されたポンプ要素(14)を備えている。軸(12)は、第1の軸受組立体(24)と第2の軸受組立体(26)とによりポンプハウジング(10)内に支持されている。動作中に生じる軸(12)とポンプハウジング(10)との熱膨張の差を補償するために、第1の軸受組立体(24)は、軸方向の移動を少なくとも部分的に補償するための補償要素(32)を有する。 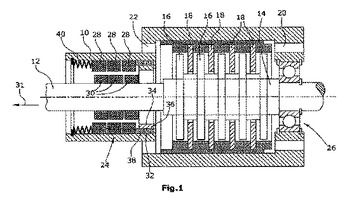 (もっと読む)
(もっと読む)
ロール軸を支持するマグネチック軸受装置
本発明はロール軸を支持するマグネチック軸受装置に関し、特に永久磁石や電磁石を利用してロール軸を非接触式で支持するマグネチック軸受装置に関する。本発明のロール軸を支持するマグネチック軸受装置は、ロール軸に向かって形成された突出部で磁場を発生する磁石と、上記磁石を一方向に支持する胴部とを含み、上記ロール軸と上記突出部の間に空隙を形成しながら上記ロール軸を支持し、上記突出部の両側はラウンド処理されたことを特徴とする。 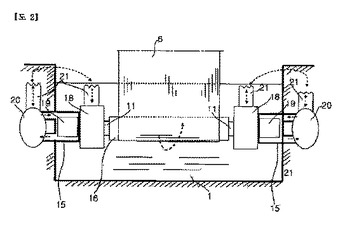 (もっと読む)
(もっと読む)
磁気軸受け構造を使用した搬送のための方法及びシステム
磁気軸受け構造(100)を使用した搬送のための方法及びシステムが開示される。一態様では、荷を運ぶための装置は、磁束源(104)と、磁化可能構造(220)に相対的な磁束源(104)の位置を制御するように構成されたコントローラ(225)とを含む。磁束源(104)は、反対の極性を有する第1の上方部分と第1の下方部分とを含む。これらの第1の部分は、磁化可能構造(220)の第1の側から水平方向に間隔を空けられている。磁束源は、更に、反対の極性を有する第2の上方部分と第2の下方部分とを含む。これらの第2の部分は、磁化可能構造の第2の側から水平方向に間隔を空けられている。第2の側は、第1の側の反対側である。第1及び第2の上方部分は、磁化可能構造の上方部分に磁気的に引き付けられ、第1及び第2の下方部分は、磁化可能構造の下方部分に磁気的に引き付けられる。  (もっと読む)
(もっと読む)
ベアリングレスモータのパラメータ設定方法
【課題】ベアリングレスモータの制御において、軸支持変調式で用いるパラメータを、実際のモータの特性に応じて最適に設定する。
【解決手段】トルク電流指令値(imq*)を順次変化させていき、軸支持電流指令値(isq1*)が0のときの軸支持電流指令値(isd1*)を基に、第1の軸支持側制御系に用いる比例係数KA1,KC1を求め、軸支持電流指令値(isd1*)が0のときの軸支持電流指令値(isq1*)を基に、第1の軸支持側制御系に用いる比例係数KB1,KD1を求め、軸支持電流指令値(isq2*)が0のときの軸支持電流指令値(isd2*)を基に、第2の軸支持側制御系に用いる比例係数KA2,KC2を求め、軸支持電流指令値(isd2*)が0のときの軸支持電流指令値(isq2*)を基に、第2の軸支持側制御系に用いる比例係数KB2,KD2を求める。
(もっと読む)
遠心式ポンプ装置
【課題】インペラをスムーズに回転起動させることが可能な小型の遠心式ポンプ装置を提供する。
【解決手段】この遠心式血液ポンプ装置は、血液室7内に設けられたインペラ10と、インペラ10の一方面に設けられた永久磁石15と、血液室7の内壁に設けられた永久磁石16と、インペラ10の他方面に設けられた永久磁石17と、モータ室8内に設けられ、隔壁6を介してインペラ10を回転駆動させる磁性体18およびコイル20とを備える。インペラ10に対向する隔壁6および血液室7の内壁にそれぞれ動圧溝21,22を形成する。したがって、コイル電流を制御することにより、インペラ10をスムーズに回転起動させることができる。
(もっと読む)
磁気軸受の制御装置
【課題】 磁気軸受に加わる荷重が変動した場合でも、バイアス電流を自動的に制御することができる磁気軸受の制御装置を提供する。
【解決手段】 浮上体をラジアル方向の所定位置に非接触支持する複数のバイアスコイルを有するバイアス部及び制御コイルを有する制御部を備える磁気軸受の制御装置において、浮上体のラジアル方向の変位及びラジアル軸周りの傾きを検出し、その検出信号から浮上体に作用するラジアル方向の力及びラジアル軸周りのモーメントを求め、それらの値に基づいて、前記浮上体を前記所定位置に非接触支持する力を発生するために制御コイルに供給する制御電流値を求め、前記ラジアル方向の力又はラジアル軸周りのモーメントをフィードバックして、制御電流の値を零にすることにより求めたバイアス電流値を用いて、複数のバイアスコイルに供給するバイアス電流を制御する磁気軸受の制御装置。
(もっと読む)
軸受装置およびこれを備えた遠心圧縮機
【課題】部品点数を削減して低コスト化を図ることができる軸受装置を提供する。
【解決手段】軸受装置Bは、アキシアル磁気軸受13及びラジアルフォイル軸受14と、アキシアル磁気軸受13及びラジアルフォイル軸受14によって回転可能に支持された回転軸Sと、アキシアル方向Aにおける回転軸Sの変位を検出するための磁気センサ15とを備えている。回転軸Sは、磁性材料により形成されるとともに径が異なる2つの外周面20a,20bを有し、磁気センサ15は、ラジアル方向Rにおいて、2つの外周面20a,20bに対向して配置されている。
(もっと読む)
研削装置
【課題】 ワークの周面に形成されたみぞの軸方向の位置にずれがあっても砥石負けが発生しにくい研削装置を提供する。
【解決手段】 制御型アキシアル磁気軸受6および制御型ラジアル磁気軸受7,8によりケーシング4に対し非接触支持されて電動機10により回転させられる砥石軸5に、外周面に中高研削面Sが形成された研削砥石Gが取り付けられている。被加工物に対してケーシング4を相対的に移動させることにより、被加工物の円筒面状周面に形成されたみぞを研削する。ケーシング4を軸方向に位置決めした後、ケーシング4を径方向に移動させて、みぞの研削を行う。ケーシング4が径方向に移動して砥石Gが被加工物に接触する前は、アキシアル磁気軸受6の剛性値を通常値より低くしておき、砥石Gの研削面Sが被加工物のみぞ全体に接触してみぞ全体の研削を開始したことを検知し、みぞ全体の研削開始検知後に、アキシアル磁気軸受6の剛性値を通常値に戻すようになされている。
(もっと読む)
圧縮膨張タービンシステム
【課題】転がり軸受の長期耐久性を向上させること。
【解決手段】磁気軸受の電磁石17は、スラスト板13aに非接触で対向するように、ハウジング14に取付けられる。翼車6a、7aは、前記スラスト板13aと共通の主軸13に嵌合し、タービン側翼車7aで発生した動力により、コンプレッサ側翼車6aを駆動させる。転がり軸受15,16とこの転がり軸受の支持系とで形成される合成バネの剛性値は、電磁石17の負の剛性値よりも大という関係に設定される。コンプレッサ翼車6aとコンプレッサ側の転がり軸受15との間、またはタービン翼車7aとタービン側の転がり軸受16との間には、フランジ部43a,45aを有する円筒状の軸受押え部材43,45が配置される。コンプレッサ側ケーシング6bまたはタービン側ケーシング7bには、前記フランジ部43a,45aと干渉して主軸13の軸方向移動を規制するリング状の部材44,46が配置される。
(もっと読む)
磁気軸受装置および真空ポンプ装置
【課題】磁気軸受装置の回転試験を低コストで行なうことが可能な磁気軸受装置および真空ポンプ装置を提供する。
【解決手段】磁気軸受装置は、回転翼15を回転させる磁気軸受スピンドル1と、磁気軸受スピンドル1を制御するコントローラ16とを備え、コントローラ16は、回転翼15が磁気軸受スピンドル1に取り付けられている第1の動作モードであるか、または回転翼15が磁気軸受スピンドル1に取り付けられていない第2の動作モードであるかに基づいて磁気軸受スピンドル1の制御を行なう。
(もっと読む)
磁気軸受装置
【課題】加工中にも主軸伸び補正機能を正しく動作させ高精度な加工が可能な磁気軸受主軸を実現すること。
【解決手段】主軸径検出処理部4と、主軸伸び演算部5,補正値演算部6,補正指令演算部7により構成される伸び補正演算部8とを備え、加工負荷による主軸31のラジアル方向の変位に対して、対向する参照センサであるラジアル変位センサ28,40からの信号を加算することにより、加工負荷によるラジアル方向の変位分をキャンセルし、また、回転周波数成分を除去するフィルタ処理部3により、非軸対象の回転振れが発生した場合において回転振れ信号を遮断し、さらに、プロセス条件により主軸31の状態が変化する場合においても補正値演算部6の出力に基づき、伸び補正値を補正することにより、加工中でも主軸31の伸び補正機能を正しく動作させることができる。
(もっと読む)
1 - 16 / 16
[ Back to top ]