
Fターム[3J552PA55]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 目的(一般) (9,045) | 制御精度の向上 (599) | オーバーシュート,アンダーシュート防止 (64)
Fターム[3J552PA55]に分類される特許
1 - 20 / 64
誘導性負荷制御装置
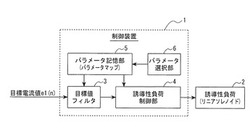
【課題】オーバーシュート、アンダーシュート及びリンギングを抑制しながら電流目標値に短時間で到達することができる誘導性負荷制御装置を提供する。
【解決手段】誘導性負荷を制御する誘導性負荷制御装置であって、前記誘導性負荷2に供給する電流目標値が入力されて複数のフィルタパラメータを使用して微分特性を発揮する目標値フィルタ3と、該目標値フィルタのフィルタ出力に基づいて前記誘導性負荷に供給する負荷電流を制御する誘導性負荷制御部4と、前記目標値フィルタの各フィルタパラメータを複数の選択条件毎に格納するパラメータ記憶部5と、前記選択条件を検出する選択条件検出部61と、該選択条件検出部で検出された選択条件に基づいて前記パラメータ記憶部から当該選択条件に合致する各フィルタパラメータを選択して前記目標値フィルタに組込むパラメータ選択処理部62とを備えている。
(もっと読む)
無段変速装置

【課題】自動変速モードと手動変速モードとのうち、手動変速モードで運転を行っている場合に、運転者の変速操作がなくても駆動源(エンジン)が許容限度を超える状態で運転される事を防止できる構造を実現する。
【解決手段】運転者が選択した変速段に対応する速度比に調節されている状態で、その速度比のまま運転を続けると、例えば駆動源の回転速度が最大許容回転速度を超えると判定される場合には、手動変速モードが選択されているにも拘らず、速度比を当該変速段に対応する速度比から自動的に増速する。又、駆動源の回転速度が最小許容回転速度未満になると判定される場合には、同じく手動変速機能が選択されているにも拘らず、速度比を当該変速段に対応する速度比から自動的に減速する。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】電気式変速機構と機械式変速機構とを備える車両用動力伝達装置において、機械式変速機構の変速に際して、充放電収支に関係なく、目標エンジン回転速度を維持する。
【解決手段】自動変速機18の変速に伴うMG2回転速度Nmの変化によってエンジン軸に付加されるトルク分に相当するエンジントルクTeを変化させるエンジントルク補正制御が、自動変速機18の変速におけるイナーシャ相中に実行されるので、MG2回転速度Nmの変化によるエンジン軸発生トルクをエンジン12側で相殺することにより、充放電収支を変えることなく、自動変速機18の変速に伴う実エンジン回転速度Neと目標エンジン回転速度Ne*との乖離を抑制する制御を実施することができる。
(もっと読む)
油圧制御装置
【課題】異なる変速装置間でのアキュムレータの共用化を図りつつ、当該アキュムレータと接続される油圧式摩擦係合要素の円滑な動作を確保する。
【解決手段】油圧制御装置50は、クラッチC1とC1リニアソレノイドバルブSLC1とを結ぶ油路L1と連通するアキュムレータ55を含み、クラッチC1の係合中に油温Toilが基準温度Tref以下であるときに、C1リニアソレノイドバルブSLC1は、クラッチC1が伝達すべきトルクに応じた油圧よりも高く、かつアキュムレータ55に作動油を充填可能とする油圧を生成するように制御される。
(もっと読む)
車両用無段変速機の変速制御装置
【課題】ダウンシフトの変速応答性を向上させつつ、たとえハンチングが発生しても速やかに収束可能な車両用無段変速機の変速制御装置を提供する。
【解決手段】ダウンシフトの変速指令があった場合、実入力回転数が目標入力回転数より所定値以上オーバーシュートした後、実入力回転数が目標入力回転数より所定値以上アンダーシュートした時にハンチングと判定し、判定後アップシフト用のフィードバックゲインを判定前のフィードバックゲインより小さいハンチング用ゲインに切り替え、オーバーシュート量を抑制する。ハンチングが収束したと判定されると、ハンチング用ゲインを判定前のフィードバックゲインに戻す。ハンチングが発生した時だけアップシフトゲインを修正してオーバーシュートを抑制し、ハンチングが収束すれば元のアップシフトゲインに戻すため、ダウンシフトの変速応答性を犠牲にせずに速やかにハンチングが収束する。
(もっと読む)
車両用電動式ポンプの制御装置
【課題】エンジンで駆動される機械式ポンプを補助するために設けた電動式ポンプを、エンジン停止前から作動させても、過大な電流が流れることを抑制でき、かつ、流量のオーバーシュートを抑制できる制御装置を提供することを目的とする。
【解決手段】エンジンの停止前から、モータの印加電圧の操作によるモータ電流の制御によって電動式ポンプを作動させる。そして、エンジンの回転停止に伴う電動式ポンプへの移行段階を、エンジンの回転速度、モータの回転速度、電動式ポンプの吐出側に設けた一方向弁の下流側圧力などに基づいて判断すると、モータの印加電圧の操作によるモータ電流の制御から、モータの印加電圧の操作によるモータ回転速度の制御へと移行させる。
(もっと読む)
無段変速機の制御装置
【課題】無段変速機が搭載された車両において、車両発進時の変速制御にオーバーシュートが発生することを抑制する。
【解決手段】車両発進時の目標入力回転数を先読みし、変速制御を早く開始させるためのフィードフォワード制御量を変速速度と変速機の入力トルクとに基づいて算出し、その算出したフィードフォワード制御量に基づいて車両発進時にフィードフォワード制御を実行することで車両発進時(変速開始時)の変速油圧を大きくする。このような制御によりフィードバック制御のみを実行する場合よりも変速開始を早くすることが可能となり、これによって車両発進時の最大変速比γmaxとしてハード的最LOWを用いている無段変速機において、車両発進時の変速制御にオーバーシュートが発生することを抑制することができる。
(もっと読む)
油圧制御装置
【課題】過大なオーバーシュートとアンダーシュートの繰り返しを避けつつ、目標の油圧値を迅速、かつ安定的に実現すること。
【解決手段】フィードバック制御を有する油圧制御システムにおいて、目標油圧値に向けて油圧を上昇又は下降させる際に、目標油圧値より高い(又は低い)暫定目標油圧値を一時的に目標として与え、実油圧値が目標油圧値を超える前に、目標を前記目標油圧値に変更することにより、実油圧値を、オーバーシュートの発生を抑えつつ、速やかに目標油圧値に収束させる制御を行う油圧制御装置。
(もっと読む)
トロイダル変速機構の制御装置
【課題】本発明は、走行装置としてトロイダル変速機構を用いたものにおいて、滑らかな自動変速を提供することが課題である。
【解決手段】入力ディスク4b,4bと出力ディスク4a,4aの間に設けるバリエータ5の傾倒角を変更することで変速伝動するトロイダル変速機構4及び遊星機構61と高・低クラッチ30を設けたミッションケース1を構成し、バリエータ5の作動負荷検出手段BRを設け、該作動負荷検出手段BRが検出する負荷が所定値以下の場合にはバリエータ5が高・低クラッチ30の切換位置であるシンク位置Sに向かうバリエータ比変化率を他のバリエータ比変化率よりも小さく制御したことを特徴とするトロイダル変速機構の制御装置とする。
(もっと読む)
油圧制御装置およびベルト式無段変速機の制御装置
【課題】応答性を向上させつつ、油圧室を目標圧に収束させることのできる油圧制御装置を提供する。
【解決手段】開閉弁は、油圧室に圧油を供給するための増圧用開閉弁と前記油圧室から圧油を排出するための減圧用開閉弁とを有し、増圧する場合には目標圧となるように前記増圧用開閉弁を開弁動作させ、目標圧よりも相対的に低く設定された閾値まで実際の圧力が上昇したのちに閉弁動作させ、減圧する場合には目標圧となるように前記減圧用開閉弁を開弁動作させ、目標圧よりも相対的に高く設定された閾値まで実際の圧力が下降したのちに閉弁動作させる。
(もっと読む)
車両の制御装置
【課題】 ベルト式無段変速機を備える車両においてインギヤ制御を行うときに機関出力を適切に制御し、機関回転速度の急減あるいは機関停止を確実に防止することができる車両の制御装置を提供する。
【解決手段】 クラッチ42が切断された状態から締結させるインギヤ制御が実行されているときに、CVT43のベルト挟圧を増加させる制御が行われ、ベルト挟圧の増加量を示す側圧指令値FTQPDに応じて、オイルポンプ24によってエンジン1に加わる推定負荷トルクFTQOPが算出され、推定負荷トルクFTQOPに応じてインギヤ制御補正項DICVTOPADDが算出され、インギヤ制御補正項DICVTOPADDによってスロットル弁の目標開度THCMDが増加方向に補正される。
(もっと読む)
変速機の制御装置
【課題】 変速機の係合装置を作動させる油圧アクチュエータの推力および作動応答性を両立させる。
【解決手段】 油圧アクチュエータA1は、大きい第1受圧面を有する1速ピストンPS1と小さい第2受圧面を有する3速ピストンPS3とを備えており、低温時の第1モードで第1受圧面だけに油圧を作用させて油圧アクチュエータA1を右方向に駆動して1速変速段を確立し、常温時の第2モードで第1、第2受圧面の両方に油圧を作用させて油圧アクチュエータA1を右方向に駆動して1速変速段を確立し、常温時の第3モードで第2受圧面だけに油圧を作用させて油圧アクチュエータA1を左方向に駆動して3速変速段を確立する。第1モードでは油圧アクチュエータA1が大推力、低速で作動するので、作動油の粘性が高くなる低温時であっても確実な変速を可能にすることができ、第2モードでは油圧アクチュエータA1が小推力、高速で作動するので、大推力が必要とされない常温時に高い変速応答性を確保することができる。
(もっと読む)
自動変速機
【課題】摩擦要素のばらつきを学習してシフトクオリティを向上できる自動変速機を提供することを目的とする。
【解決手段】変速の前に、解放側摩擦締結要素(32、33)の締結圧を減少させて、当該解放側摩擦締結要素(32、33)をスリップさせ、締結側摩擦締結要素(33、32)の締結圧を上昇させて解放側摩擦締結要素(32、33)を再締結してスリップを解消し、解放側摩擦締結要素(32、33)の再締結の動作に基づいて、変速機構(30)の変速時に締結側摩擦締結要素(33、32)を解放状態からトルク伝達開始状態とする制御量を学習する。
(もっと読む)
無段変速機の油圧制御装置
【課題】イグニッションOFF時に発生する制御圧オーバーシュートを抑制して、無段変速機の耐久性を確保することを目的とする。
【解決手段】無段変速機の油圧制御装置11では、ベルトを介して連結された一対の可変プーリからなる無段変速機において、イグニッションキー18がOFFしたことを検出する検出手段を備え、イグニッションキー18がOFFしたことを検出してから所定時間だけアクチュエータの駆動を継続し、所定時間経過後は前記アクチュエータの駆動を停止する。
(もっと読む)
無段変速機の制御装置
【課題】無段変速機の実変速比を目標変速比に追従させる際の追従性を向上させることのできる無段変速機の制御装置を提供する。
【解決手段】無段変速機4の実変速比Rγを目標変速比Tγとするための指示圧Pinは、フィードフォワード圧Pinff及びフィードバック圧Pinfbに基づき算出される。無段変速機4に個体差や経年劣化等が生じている場合には、それによる実変速比Rγと目標変速比Tγとの間の定常的なずれをフィードバック圧Pinfbの増減を通じてなくすことが可能である。そして、無段変速機4の定常運転時、フィードバック圧Pinfbが初期値「0」から離れているときには、そのフィードバック圧Pinfbが上記定常的なずれに対応した値となる学習値G(i)として記憶され、以後は同学習値G(i)がフィードフォワード圧Pinffに反映される。
(もっと読む)
動力伝達装置
【課題】無段変速機を搭載する車両において、駆動輪の回転速度の急変に対してより適切に対処する。
【解決手段】駆動輪に空転によるスリップが発生したときには、CVTのインプットシャフトの回転変化量ΔNiに設定値Nsetを加えたものを許容回転変化量ΔNi*に設定し(S130,S150,S160)、要求回転速度Ni*とインプット回転速度Niとの偏差(N*−Ni)が許容回転変化量ΔNi*の範囲内となるよう目標回転速度Ni*を設定してCVT50を制御する(S170〜S210)。これにより、スリップの発生により駆動輪の回転速度(アウトプット回転速度No)が急上昇しても、インプット回転速度Niを追従させることができ、アップシフトへの移行を抑制することができる。
(もっと読む)
車両の制御装置および制御方法
【課題】無段変速機の変速制御においてオーバーシュートに起因した回転停滞の発生を抑制して、運転者の意図に応じた車両の挙動を応答性よく実現する。
【解決手段】ECUは、目標値NIN_T(1)を決定するステップ(S100)と、切換タイミングを決定するステップ(S102)と、プライマリプーリ回転数NINが目標値NIN_T(1)に収束する場合(S104にてYES)、目標値NIN_T(2)を決定するステップ(S106)と、最終目標値NIN_FTを決定するステップ(S108)と、変速制御を実行するステップ(S110)とを含む、プログラムを実行する。
(もっと読む)
車両の制御装置
【課題】変速ショックの発生を抑制しながら、フューエルカット制御の実施時間を長くする。
【解決手段】フューエルカット制御中のダウンシフト制御時(コーストダウン変速制御時)には、フューエルカット復帰回転数を下げて、通常制御時のフューエルカット復帰回転数Nnorよりも低い回転数Ndwnに設定する。このような設定により、コーストダウン変速制御中においてエンジン回転数NEが一時的に落ち込んでも、フューエルカット制御及び減速ロックアップスリップ制御を継続することが可能となり、燃費の向上を図ることができる。しかも、ダウンシフト変速線を高車速側に設定しなくて済むので、変速ショックの発生を抑制しながら、フューエルカットを継続することが可能になる。
(もっと読む)
自動変速機の制御装置
【課題】変速時の空吹きの発生タイミングおよびその形状に応じて適切な学習制御を実行して、変速フィーリングの悪化を防止することのできる自動変速機の制御装置を提供する。
【解決手段】複数の摩擦係合要素の係合および解放により速度比を変更して内燃機関で発生した駆動トルクを駆動輪に伝達する自動変速機5の制御装置12は、パワーオンダウンシフト開始されてイナーシャ相の終了後の2つの期間に発生する空吹き量を積算した2つの空吹き量積算値を含む空吹き情報を取得し、当該空吹き情報に応じて棚圧制御時の棚圧および緩増圧制御時の増圧率の一方を補正する。
(もっと読む)
無段変速機の制御装置
【課題】変速用ソレノイドの操作量の学習が不十分であっても、変速機入力回転数のフィードバック制御を好適に行うことのできる無段変速機の制御装置を提供する。
【解決手段】電子制御ユニット60は、変速用ソレノイドの制御出力特性の学習制御を行うとともに、車両の加速時に入力回転数を、車速に比例して推移するように設定されたリニアシフト時目標回転数とすべくベルト式無段変速機16のリニアシフト制御を行う。電子制御ユニット60はこのときのリニアシフト時目標回転数の設定に際して、その設定に使用する目標回転数補正量の演算マップを、変速用ソレノイドの制御出力特性の学習の進行状況に応じて切り換える。
(もっと読む)
1 - 20 / 64
[ Back to top ]