
Fターム[3J552VE07]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 外部からの情報 (777) | 外部情報検知手段 (220) | 通信情報(ビーコン,FM電波等) (19)
Fターム[3J552VE07]に分類される特許
1 - 19 / 19
車両の回生発電制御装置
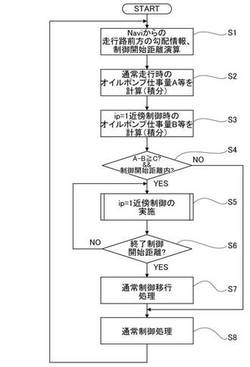
【課題】アクセルオフ操作によるコースト走行時、車両トータルとしてのエネルギ回収率の改善を図ること。
【解決手段】ハイブリッド車両の回生発電制御装置は、副変速機付き無段変速機CVTと、モータ/ジェネレータMGと、統合コントローラ10と、を備える。副変速機付き無段変速機CVTは、左右タイヤLT,RTに対して動力を伝達する。モータ/ジェネレータMGは、動力伝達経路からの動力により発電を行う。統合コントローラ10は、アクセルオフ操作によるコースト走行時に、ip=1近傍制御を実施することにより、副変速機付き無段変速機CVTへの変速油圧の元圧であるライン圧PLを低下させた上で回生発電制御を行う(図4)。
(もっと読む)
減速支援システム

【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
車両運転支援装置
【課題】車両の減速時における運転者の違和感を低減する。
【解決手段】車両運転支援装置1は、自動変速機を有する車両の運転を支援する装置であって、自車両のアクセル開度を示す情報であるアクセル開度情報を取得するアクセル開度センサ4と、アクセル開度情報に基づき、アクセル開度が所定の閾値以下であると判断した場合に、アクセル開度が所定の閾値以下であると判断する前よりも、変速比を小さくするように自動変速機を制御する制御ECU6とを備える。この構成によれば、アクセス開度が所定の閾値以下となると、自動変速機の変速比が小さくなるように制御されるので、エンジンブレーキの制動力が低下する。これにより、停止位置に向かって車両が走行しているときの減速量が抑制されるので、速やかに停止位置に到達できると共に、減速制御により運転者に与える違和感が低減される。
(もっと読む)
車両用駆動力制御装置
【課題】駆動要求操作に対する動力源の回転数変化を抑制することのできる車両用駆動力制御装置を提供すること。
【解決手段】動力源と動力伝達機構とを備え、駆動力を要求する駆動力要求操作の操作量が所定の変化幅の範囲内にある場合に、その操作量に対する動力源の回転数変化が抑制される車両用駆動力制御装置において、駆動力要求操作の操作量が増加から減少あるいは減少から増加に転じた時点の操作量を保持する操作量保持手段(ステップS10)と、一回前に保持された操作量を基準として駆動力要求操作の操作量に対する動力源の回転数変化を抑制する変化幅を算出する変化幅算出手段(ステップS5およびステップS6)とを備え、駆動力要求操作の操作量が変化幅の範囲内にある場合に、保持された操作量が動力源あるいは動力伝達機構に対して出力される(ステップS11)。
(もっと読む)
車両の変速比制御装置及び変速比制御方法
【課題】要求駆動力に対する加速レスポンスの悪化を抑制することが可能な、車両の変速比制御装置及び変速比制御方法を提供する。
【解決手段】消費エネルギー効率判定手段44が、車両の速度に対応する変速比領域を設定した通常変速マップに基づく変速比の変更条件で、走行パターン予測手段38が予測した走行パターンにより車両が走行した場合の、車両が消費する通常消費エネルギーよりも、通常変速マップよりも低速側の変速比領域を高速側へ拡大したローギア領域拡大変速マップに基づく変速比の変更条件で、走行パターン予測手段38が予測した走行パターンにより車両が走行した場合の、車両が消費するローギア消費エネルギーの効率が良いと判定すると、ローギア領域拡大変速マップに基づいて、駆動輪とモータとの間に介装した変速機の変速比を変更する。
(もっと読む)
車両用制御装置
【課題】この発明は、エンジンの自動的な停止/再始動について運転者の操作負担を軽減し、エンジンの再始動後に車両が自動的に発進されることがない車両用制御装置を実現することを目的とする。
【解決手段】この発明は、車両用制御装置において、エンジン制御手段は、エンジンを自動的に停止させる場合に、シフトバイワイヤ式変速制御手段に変速機を駐車レンジに変更するように要求し、また、エンジンを再始動した後、シフトバイワイヤ式変速制御手段に変速機のシフトレンジを走行レンジに変更するように要求し、シフトバイワイヤ式変速制御手段は、走行レンジヘの変更要求がある時で、かつ車両のブレーキ装置が作動状態ではない時には、車両状態判定手段により車両が前方に移動可能であると判定された場合にのみ、変速機を走行レンジに変更するように制御することを特徴とする。
(もっと読む)
省燃費運転診断装置、省燃費運転診断システム及び省燃費運転診断方法
【課題】運転者のシフトモード状態選択操作の改善意欲や省燃費運転の知識と意識を向上させる。
【解決手段】シフトモード状態判定部11b1は、車両1aのシフトモード状態が所定条件を充足しているか否かを判定する。走行距離積算部11cは、シフトモード状態が所定条件を充足していると判定された場合、最適シフトモード状態選択走行距離を積算する。走行距離積算部11cは、シフトモード状態が所定条件を充足していると判定されなかった場合、不適シフトモード状態選択走行距離を積算する。省燃費運転採点部12は、走行距離積算部11cによって積算された各積算値に基づいて運転者の運転を採点する。省燃費運転アドバイス生成部13は、採点結果に応じて、採点結果とともに省燃費運転アドバイスを運転者へ通知する。よって、運転者に燃費のよい最適シフトモード状態選択を奨励し、運転者の省燃費運転の知識と意識の向上を図ることができる。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、前記所定区間に対する運転支援制御の実施規定の選択を取得し、選択された前記実施規定に示される条件を満たすとき、前記所定区間の開始地点に到達する前に前記自車両の変速比を前記加速変速比に設定させ、選択された前記実施規定に示される条件を満たすとき、前記所定区間の開始地点に到達する前に前記自車両の車速を前記目標車速まで減速させるための減速制御を行う。
(もっと読む)
車両の制御装置
【課題】車両の現在位置における道路状況と、伝動装置の動力伝達状態との適合性を向上させることの可能な、車両の制御装置を提供することを目的とする。
【解決手段】車両の乗員により操作されるポジション選択装置と、車両の駆動力源から車輪に至る動力伝達経路に配置された伝動装置とを有する車両の制御装置において、車両が停止および走行した場所を記憶し、かつ、ポジション選択装置の操作内容を記憶する学習手段(ステップS1)と、過去に記憶した場所に車両の現在位置があり、かつ、ポジション選択装置が現在操作されたとき、ポジション選択装置の操作内容が過去と現在とで異なるか否かを判断する比較手段(ステップS3)と、ポジション選択装置の操作内容が過去と現在とで異なると判断された場合は、ポジション選択装置の現在の操作内容に合わせて伝動装置の動力伝達状態を設定することを禁止する禁止手段(ステップS4)とを備えている。
(もっと読む)
自動車の変速指示装置
【課題】運転者への変速指示を行う変速指示装置に対し、渋滞路走行中における変速指示が運転者に煩わしさを与えないようにする。
【解決手段】現ギヤポジションが目標ギヤポジションと異なっている場合に運転者に対して変速指示を行うようにした変速指示装置に対し、車速、アクセル開度等から渋滞路走行中であるか否かを判定すると共に、運転者が変速指示に従って変速操作を行っている頻度を判定する。渋滞路走行中であって且つ運転者が変速指示に従って変速操作を行っている頻度が低い場合には、現ギヤポジションが目標ギヤポジションと異なっている場合であっても変速指示を解除する。これにより、渋滞路走行中に変速指示が頻繁に行われることで運転者に煩わしさを与えてしまうことを解消する。
(もっと読む)
自動変速機の制御装置、制御方法およびその方法をコンピュータで実現されるプログラムならびにそのプログラムを記録した記録媒体
【課題】車両周囲の交通状況に応じて、発進クラッチを完全に解放するニュートラル制御を実施する。
【解決手段】ECT_ECUは、ニュートラル制御を開始するか否かを判定するステップ(S200)と、ニュートラル制御を開始すると判定されてから(S200にてYES)、経過時間Cntが予め定められた待機時間Tsよりも大きく(S202にてYES)、かつ、通行停止に対応する信号の点灯が終了するまでの終了時間Tbが予め定められた時間Tnよりも大きいと(S204にてYES)、発進クラッチを完全に解放するステップ(S206)とを含む、プログラムを実行する。
(もっと読む)
駆動力制御装置
【課題】変速部を用いて応答性良くかつエンジン回転数の上昇や燃費の悪化を抑制しつつ駆動力の変更を行うことが可能な駆動力制御装置を提供する。
【解決手段】変速時間の異なる複数の変速部により変速比を設定する駆動力制御装置において、車両の走行経路前方に前記車両の駆動力変更必要箇所を検出する手段(S01)と、前記駆動力変更必要箇所が検出されたときに、前記変速時間が長い前記変速部の変速比を低速用変速比に、前記変速時間が短い前記変速部の変速比を高速用変速比に変更する制御部(S06,S07)とを備えている。
(もっと読む)
自動変速制御システム
【課題】実際の走行状況に適合した最適な変速制御を行うことができる自動変速制御システムを提供する。
【解決手段】自車両10が走行する走行位置を走行した複数の車両の走行情報を受信する走行情報送受信部22と、上記複数の走行情報から安定して走行した車両の走行情報のみを抽出する対象走行情報抽出部31と、上記抽出された走行情報に基づいて所定位置の位置走行情報を算出する位置走行情報算出部32と、変速制御部132によって自車両10の走行状態のみにより制御した変速制御を上記走行位置の位置走行情報に基づいて補正する変速制御補正部133と、を備えることにより、安定して走行した車両の走行情報に基づいて、自動変速機102の変速制御を補正することができ、現場の自然環境や道路状況、混雑状況等、実際の走行状況に応じた最適な走行を実現することができる。
(もっと読む)
車両用走行制御装置および車両用走行制御方法
【課題】分岐路の先の目標車速がそれぞれ大きく異なっていても、目標車速が低い道路に対する減速制御を確保しつつ、分岐後に減速制御が必要ない道路を走行するような場合であっても、運転者に違和感を与えるような大きな減速制御を防止する。
【解決手段】自車両前方の道路に対して目標車速を設定し、その目標車速となるように自車速を制御する。自車前方に道路の分岐が検出されたときは、第1の減速度による1次減速制御を行った後、前記分岐先の各道路のうち、予め各道路に設定された目標車速のうち最も低い道路に対して、前記第1の減速度よりも大きな第2の減速度による2次減速制御を行う。
(もっと読む)
運転指向推定装置
【課題】車両の前方障害の影響によって運転者が減速操作を行なった場合であっても、運転指向の推定精度の低下を抑制可能な運転指向推定装置を提供する。
【解決手段】人工知能システムを用いて運転指向を推定する運転指向推定装置であって、車両の前方の障害の影響により運転者による減速操作が行われた否かを判定する判定手段(S002、S003)と、前記車両の前方の障害の影響により運転者による減速操作が行われた場合に、前記運転者による減速操作に対応する車両の前後加速度に関するパラメータを補正する補正手段(S004)と、前記補正された前記車両の前後加速度に関するパラメータに基づいて、運転指向を推定する推定手段とを備えている。
(もっと読む)
車両用駆動力制御装置
【課題】駆動力制御時にダウンシフトが生じることによる運転者の違和感を抑制可能な車両用駆動力制御装置を提供する。
【解決手段】前方の車両との位置関係に基づいて車両の加速状態や減速状態を制御し、加速の必要があるときにはスロットル開度を開く制御を行う車両用駆動力制御装置において、前記加速の必要があるときに目標加速度を求める手段(S40)と、前記変速機の変速比を増大させる側への加速制御を行うことなしに前記スロットル開度を開くことにより得られる加速度を求める手段(S50)と、前記目標加速度と前記スロットル開度を開くことにより得られる加速度の差が予め設定された所定値以内である場合には、前記所定値以内ではないときに比べて、前記変速比を増大させる側への変速幅を小さくする手段(S60)とを備えている。前記変速比を増大させる側への変速幅を小さくすることには、前記変速比を増大させる側への変速を禁止することが含まれる。
(もっと読む)
ベルト式無段変速機の制御装置
【課題】運転者の加速意図を的確に検知し、それに応じて変速油圧を最適な値として変速機の制御を行うことのできる、ベルト式無段変速機の制御装置を提供する。
【解決手段】本発明によるベルト式無段変速機の制御装置によれば、運転者の加速意図を的確に検知し、この加速意図に応じて変速機を変速制御するための変速油圧を最適化できることから、加速意図がある場合には動力源から高いトルクが変速機に入力されてもVベルトとプーリとの間に滑りが発生しない油圧(プーリがVベルトを挟圧する力)が得られる一方、加速意図が無い場合には、油圧を低下させてプーリがVベルトを挟圧する力をベルトとプーリとの間にスリップが生じない程度に小さくして、燃費の低下を防ぐことが可能となる。
(もっと読む)
運転支援装置
【課題】道路情報に基づいて、新しい道路環境に適応するように自車両を走行させ、安全性を向上させること。
【解決手段】車輪の回転速度に対応した信号を検出する車速センサ10、ナビゲーション装置20、及びスロットルバルブの開度を調節するスロットル駆動器40が設けられている。事前登録地点(例えば、制限速度が変更される地点)に自車両が接近した場合、事前登録地点を起点とする道路の制限速度を取得し、自動的に、スロットル駆動器40を用いて、自車両の駆動力を制御することによって、自車両の車速を制限速度まで変更させるようにした。
(もっと読む)
自動変速機付車両の制御装置
【課題】オ−トクル−ズ制御による自動変速と、マニュアル操作による変速との干渉を防止する。
【解決手段】オ−トクル−ズ制御の一態様として、自動変速を行いつつレーダS6で検出される前方障害物との衝突回避を行う危険回避モードが設定される。自動変速機の変速モードとして、自動変速が行われる第1変速モードと、変速指令スイッチ86、87がマニュアル操作されたときにのみ変速が行われ第2変速モードとが設定される。危険回避モードの制御が実行中あるいはその必要性がありと判断されたときは、第1変速モードでの変速が優先される(第2変速モードでの変速よりも危険回避モードの制御が優先されて、危険回避モードに基づく自動変速が行われる)。
(もっと読む)
1 - 19 / 19
[ Back to top ]