
Fターム[3J552VE08]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 外部からの情報 (777) | 外部情報検知手段 (220) | カーナビGPS情報 (137)
Fターム[3J552VE08]に分類される特許
61 - 80 / 137
車両用制御装置

【課題】車両の走行に必要な駆動力を確保する車両用制御装置(6,7,8)において、コーナリング中に横方向加速度を受けることをあまり好まない安定嗜好の運転者に対して不安・不快意識を抱かせないようなコーナリングを可能とする。
【解決手段】走行路のコーナの手前位置で、少なくとも車両重量、現在車速、前記コーナの曲率および路面勾配等の情報を収集して、前記コーナを現在車速で走行する際に車両に発生する横方向加速度を推定する推定手段(ステップS1,S2)と、この推定手段の推定結果が予め規定される閾値以上の場合に、安定嗜好の運転者が不安・不快意識を持つ条件が成立したと認識して、駆動力を小側に制御する対処手段(ステップS3〜S6)とを含む。
(もっと読む)
自動変速機を搭載した車両の制御装置

【課題】自走式の立体駐車場における下りスロープで、運転者が特に操作することなく、適切なエンジンブレーキを作用させる。
【解決手段】ECUは、自車両の現在位置が自走式立体駐車場であると(S1100)、算出された推定エンジントルクTEと検出された実加速度αとに基づいて登坂判定するステップ(S1400)と、降坂走行なしで車両が駐車されると登坂実績を記憶するステップ(S1500)と、登坂実績が記憶された状態において車両が再発進すると(S1600)、変速ギヤ段が1速の時には1速を保持するステップ(S1800)と、変速ギヤ段が1速以外の時には1速にダウンシフト変速するステップ(S1900)とを含む、プログラムを実行する。
(もっと読む)
走行支援装置、走行支援方法及び走行支援プログラム
【課題】カーブ走行時にシフト制御を行うとともに、変速ショックを緩和することができる走行支援装置、走行支援方法及び走行支援プログラムを提供する。
【解決手段】車両Cの自動変速装置と制動装置とを制御して、車両前方のカーブに対して支援を行うナビゲーションユニット20において、メインCPUは、車両の進行方向前方の道路に関する道路情報を取得して、前記道路情報に基づき支援対象となるカーブがあるか否かを判断し、車両の進行方向前方に支援対象のカーブが検出された際に、該カーブの走行に適した推奨変速段を算出し、車両情報に基づき、その時点の変速段から前記推奨変速段に変更した際に生じるトルク変化量を推定し、該トルク変化量に基づいて、ブレーキECU12を制御して制動力を付加するとともに、自動変速装置を制御して前記推奨変速段に変更する。
(もっと読む)
旋回支援装置、旋回支援方法及び旋回支援プログラム
【課題】車両の回頭性を向上することができる旋回支援装置、旋回支援方法及び旋回支援プログラムを提供する。
【解決手段】道路の通行方向を含む経路データ18を記憶した地理情報記憶部17を用いて、自車両の旋回を支援するナビゲーションユニット2において、メインCPU20は、自車位置を演算し、経路データ18に基づき、自車位置の進行方向前方に、支援対象となる転回地点を検出し、自車両の転回地点での転回方向を検出し、転回地点の自車両の転回方向に基づき、自車両内輪に制動力を付加する。
(もっと読む)
車両用駆動力制御装置
【課題】コーナーを走行する際にコーナーの情報に基づいて変速比を制御する車両用駆動力制御装置において、運転者の感覚に合うタイミングでコーナーの情報に基づく変速比の制御から復帰することが可能な車両用駆動力制御装置を提供する。
【解決手段】コーナーを走行する際に前記コーナーの情報に基づいて変速比を制御する車両用駆動力制御装置であって、前記車両に働く横加速度を検出する手段(S002)と、アクセル開度を検出する手段(S002)とを備え、前記横加速度の変化量と前記アクセル開度の変化量とに基づいて前記変速比の制御から復帰するタイミングが変更される(S004)。
(もっと読む)
自動変速機の制御装置および制御方法
【課題】運転者の操作および車両が走行する環境の両方の相互作用を考慮したギヤ段を設定することにより、オートマチックトランスミッションのギヤ段をきめ細かく制御する。
【解決手段】アクセル開度およびブレーキペダルのストローク量などの運転者の操作を示す情報に応じて、アクセル開度および駆動力を成分として有するパラメータが設定される。運転者の操作を示す情報と同様に、路面の勾配、路面の曲率、路面の摩擦係数μ、道路の種類、渋滞の距離などの、車両が走行する環境を示す情報に応じて、アクセル開度および駆動力を成分として有するパラメータが設定される。運転者の操作を示す情報から得られたパラメータα(1)および車両が走行する環境を示す情報から得られたパラメータα(2)を調停することにより、1つのパラメータα(OUT)が設定される。パラメータα(OUT)に応じたギヤ段が設定される。
(もっと読む)
自動変速機の制御装置および制御方法
【課題】より適切なギヤ比を設定する。
【解決手段】運転者の操作を示す情報および車両が走行する環境を示す情報に応じて、アクセル開度、車速および駆動力を成分として有するパラメータα(OUT)が設定される。アクセル開度、車速および駆動力に応じてギヤ段を定めた変速マップおよびパラメータα(OUT)に従ってギヤ段が設定される。変速マップにおいて、変速線は、車速に対する駆動力の増加率が零以上になるように規定される。ダウンシフト線は、アクセル開度が大きいほど駆動力が小さくなるようにダウンシフト線が規定される。前回ギヤ段を変更してからのアクセル開度の変化量がしきい値より大きいという条件および前回ギヤ段を変更してからの駆動力の変化量がしきい値より大きいという条件の両方が満たされない場合、アップシフト後のダウンシフトおよびダウンシフト後のアップシフトが禁止される。
(もっと読む)
車両の変速装置のシフト制御のシステム及び方法
車両の変速装置のシフト制御のシステム及び方法。変速装置は、指定された変速装置の変速点でギヤをシフトする。車両が直面した道路の勾配の傾斜が変化すると、変速装置の変速点が、より良い車両性能を提供するように変化される。1つの実施形態によれば、道路の傾斜が、車両の加速度及びペダルの踏み込みによって生じる加速度に基づいて計算される。こうした実施形態では、ブレーキ表示は、ブレーキ信号のスイッチを使用することなく、同じ道路の傾斜の計算から計算される。ブレーキの適用が、道路の傾斜の計算によって表示されると、変速装置のシフティングが、弱い車両性能を防止するように調整される。 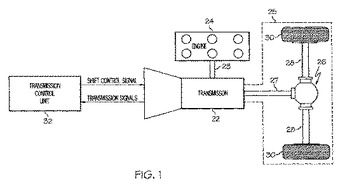 (もっと読む)
(もっと読む)
シフトバイワイヤシステム
【課題】安全性を高めるシフトバイワイヤシステムを提供すること。
【解決手段】シフトバイワイヤシステムにおいて、自動変速機のレンジ切替のためのシフトアクチュエータの出力をシフト指令に従って電気的に制御するシフト制御装置は、走行レンジを切替先とするシフト指令が入力された場合(S101,S103,S111)に、当該走行レンジにおいて車両の走行障害となる障害物を検出する(S104,S112)ことにより、入力されたシフト指令を拒絶する(S106,S114)ことを特徴としている。
(もっと読む)
駆動力制御装置
【課題】変速部を用いて応答性良くかつエンジン回転数の上昇や燃費の悪化を抑制しつつ駆動力の変更を行うことが可能な駆動力制御装置を提供する。
【解決手段】変速時間の異なる複数の変速部により変速比を設定する駆動力制御装置において、車両の走行経路前方に前記車両の駆動力変更必要箇所を検出する手段(S01)と、前記駆動力変更必要箇所が検出されたときに、前記変速時間が長い前記変速部の変速比を低速用変速比に、前記変速時間が短い前記変速部の変速比を高速用変速比に変更する制御部(S06,S07)とを備えている。
(もっと読む)
車両用クラッチ係合制御装置及びその方法
【課題】自動変速機の急なシフトを抑制する(よりスムーズなシフトを可能とする)。
【解決手段】車両変速機用クラッチ係合制御装置。装置は、自動変速機ギアセット19と、ギアセット19に連結した少なくとも一つの油圧クラッチ16とを備える。油圧コントローラ30がクラッチ16に連結される。クラッチ係合コントローラ22が油圧コントローラ30に連結され、高度センサ36がクラッチ係合コントローラ22に連結される。クラッチ係合コントローラ22は、車両の高度に対応した高度信号38を高度センサ36から受信するように構成される。検知した高度に対応した割合及び圧力のうちの少なくとも一つでクラッチ16が係合するように、クラッチ係合コントローラ22は高度信号38に応じて油圧コントローラ22の油圧要求32を調節する。この装置を用いた方法。
(もっと読む)
自動変速制御システム
【課題】実際の走行状況に適合した最適な変速制御を行うことができる自動変速制御システムを提供する。
【解決手段】自車両10が走行する走行位置を走行した複数の車両の走行情報を受信する走行情報送受信部22と、上記複数の走行情報から安定して走行した車両の走行情報のみを抽出する対象走行情報抽出部31と、上記抽出された走行情報に基づいて所定位置の位置走行情報を算出する位置走行情報算出部32と、変速制御部132によって自車両10の走行状態のみにより制御した変速制御を上記走行位置の位置走行情報に基づいて補正する変速制御補正部133と、を備えることにより、安定して走行した車両の走行情報に基づいて、自動変速機102の変速制御を補正することができ、現場の自然環境や道路状況、混雑状況等、実際の走行状況に応じた最適な走行を実現することができる。
(もっと読む)
車両用駆動力制御装置
【課題】ETC通過後の加速時のもたつきを低減させることの可能な車両用駆動力制御装置を提供する。
【解決手段】車両の駆動力を制御する車両用駆動力制御装置であって、前記車両がETCを通過することを予測又は検出する予測検出手段(S3)と、前記車両がETCを通過することが予測又は検出されたときに、駆動力を増加させるための制御を行う制御手段(S6)とを備えている。前記制御手段は、現在の車両の走行状況に基づいて(S5)、前記駆動力の増加量を決定する。
(もっと読む)
車両用駆動力制御装置
【課題】走行環境パラメータに基づいて変速機の変速制御が行われる場合に、減速度不足となる問題が抑制されることが可能な車両用駆動力制御装置を提供する。
【解決手段】走行環境パラメータ(S1)に基づいて目標減速度を求め(S2)、前記目標減速度に基づいて変速機を変速制御する車両用駆動力制御装置(S3、S7)であって、前記目標減速度の増加勾配に基づいて、前記変速制御の態様を変更する(S4、S5)。前記目標減速度の増加勾配が大きいほど、より低速段側に変速制御される。
(もっと読む)
自動変速機の制御装置
【課題】高速走行時の動力源の回転数を低下させることができるとともに、ビジーシフトを回避できる自動変速機用の制御装置を提供する。
【解決手段】複数の変速比を設定することのできる自動変速機の制御装置において、走行抵抗が、所定値以上に大きい場合と前記所定値より小さい他の所定値以下に小さい場合とのいずれかの場合で、かつ、車速が、変速段領域を設定する車速とは別途に高速状態を判断するために設定された所定車速以上の高速である場合に、前記複数の変速比のうち変速比が最も小さい最高速比を禁止する最高速比禁止手段(ステップS26)を備えている。
(もっと読む)
変速制御装置
【課題】コーナーを走行するに際してよりドライバビリティを向上させることの可能な変速制御装置を提供する。
【解決手段】コーナーの情報に基づいて変速比を変更する変速制御装置であって、前記コーナーを通過する際の必要減速度に基づき設定した第1目標変速比(S4)と、前記コーナーの立上り後の道路の情報から求めた必要駆動力に基づき設定した第2目標変速比(S5)との最大値を目標変速比(S6)として、前記変速比の変更を行う(S8)。
(もっと読む)
車両用駆動力制御装置
【課題】車両の位置ないしは車両と自動車専用道路の本線に対して接続される接続道路との位置関係を正確に判定して車両の駆動力を制御する。
【解決手段】自動車専用道路の本線から分岐して接続される接続道路と車両との位置関係に基づいて、前記車両の駆動力を制御する車両用駆動力制御装置であって、運転者による前記自動車専用道路の本線と前記接続道路との間の走行路の変更意図を検出又は推定する手段(S3)と、前記車両が前記自動車専用道路の本線と前記接続道路との間で走行路を変更したことを検出する手段(S4)とを備え、前記走行路の変更意図が検出又は推定されている間、又は前記走行路の変更意図が検出又は推定されている状態から予め設定された時間内に、前記車両が前記走行路を変更したことが検出されたときに、前記車両の駆動力の制御を許可する(S5)。
(もっと読む)
車両用駆動力制御装置
【課題】車両前方の道路環境に対応して、車両に減速度を作用させる車両用駆動力制御装置であって、運転者の減速意図が検出された地点に近いところで減速制御が開始されることが可能な車両用駆動力制御装置を提供する。
【解決手段】車両前方の道路環境を検出する手段と、前記道路環境に対して予め設定された特定領域内に車両がいるか否かを判断する手段(S005)と、運転者による減速意図が検出されたときに前記道路環境に対して適切な車両走行状態となるための減速度を作用させる手段と、運転者が前記減速意図を示したときの車両位置が前記特定領域の外である場合に、前記特定領域を拡大する手段(S008)とを備えている。
(もっと読む)
車両の変速制御装置
【課題】ドライバーの意思を十分に反映させて自動変速モードに復帰すること。
【解決手段】手動変速モードと自動変速モードとを切り替え可能な自動変速機32と、車両に搭載され走行路が直線路または曲線路かを判別する横Gセンサ20と、横Gセンサ20の検出結果に基づいて手動変速モードから自動変速モードに切り替えるECU30とを備え、更に視線認識装置26によってドライバーの視線情報を検出し、進行先の曲線路情報を加味することで自動変速モードに復帰するタイミングを制御するようにした。
(もっと読む)
車両用走行制御装置および車両用走行制御方法
【課題】分岐路の先の目標車速がそれぞれ大きく異なっていても、目標車速が低い道路に対する減速制御を確保しつつ、分岐後に減速制御が必要ない道路を走行するような場合であっても、運転者に違和感を与えるような大きな減速制御を防止する。
【解決手段】自車両前方の道路に対して目標車速を設定し、その目標車速となるように自車速を制御する。自車前方に道路の分岐が検出されたときは、第1の減速度による1次減速制御を行った後、前記分岐先の各道路のうち、予め各道路に設定された目標車速のうち最も低い道路に対して、前記第1の減速度よりも大きな第2の減速度による2次減速制御を行う。
(もっと読む)
61 - 80 / 137
[ Back to top ]