
Fターム[4C093EA17]の内容
Fターム[4C093EA17]の下位に属するFターム
複数方向から行うもの (21)
Fターム[4C093EA17]に分類される特許
101 - 106 / 106
照射中心位置決め用ポインタと、このポインタが組み込まれている放射線治療計画装置、および、治療用放射線照射装置
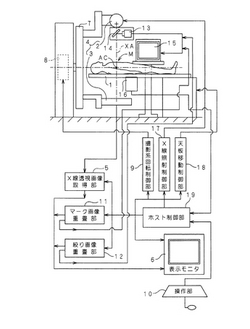
【課題】被検体における治療用放射線の照射中心の位置決めの際に照明を落とさずに済ませられるようにする。
【解決手段】この発明のポインタの場合、光学画像撮影カメラ13で天板1の上に載置された被検体Mの体表面の光学画像が撮影されて光学画像表示モニタ15で実質的にリアルタイムで表示されると共に、光学画像表示モニタ15で表示される被検体Mの体表面の光学画像にマーク画像重畳部11で照射中心位置指示マークの十字状画像が重畳される構成を備えていて、光学画像表示モニタ15の画面では照射中心位置指示マークが被検体Mの体表面の光学画像の中に十分な明るさで出現するので、照明を落とさずとも、照射中心位置指示マークをインクペン等でなぞって被検体Mの体表面に指標を付けて、被検体における治療用放射線の照射中心の位置決めを速やかに完了させることができる。
(もっと読む)
撮像パラメタを計画するための方法及びシステム
本発明は、活動中の線量測定場29及び/又はX線装置10のコリメータの開口のような幾何学的撮像パラメタを計画するための方法及び支援システムに関する。台1条の患者2の光学画像27は、カメラ21により生成され、コンピュータ25に転送される。このコンピュータ25は次に前記患者1の前記光学画像27に、例えば利用可能及び/又は稼動した線量測定場28、29の図のような幾何学的撮像パラメタの図形表示をオーバーレイする。ユーザはこれによりこのオーバーレイ画像上の前記撮像パラメタの値を制御及び対話形式で選択する。  (もっと読む)
(もっと読む)
放射線画像撮影システム及び放射線画像撮影装置

【課題】 放射線画像の画質(画像コントラスト)を格段に向上させることのできる放射線画像撮影システム及び放射線画像撮影装置の提供。
【解決手段】 以下の手段を有することを特徴とする放射線画像撮影システム。
1)放射線発生手段中に放射線照射位置決め用エネルギーの発生手段
2)放射線画像読み取り手段中に被写体の領域外ヘ照射される放射線位置決め用エネルギーを検出する検出手段
3)放射線画像読み取り手段に該検出手段の情報に基づき被写体の放射線領域外ヘ照射される放射線量及び放射線照射領域に照射する放射線量を制御する制御手段
4)放射線画像読み取り手段に放射線照射位置決め用照射手段
5)放射線画像読み取り手段に放射線照射領域を制御する制御手段
(もっと読む)
医療用画像装置における照射および赤外、超音波または磁気パルスビームへの曝露の削減を意図した方法
本発明は、医療用画像装置において、平面または非平面の表面の各項または領域に付随する値を代表する像を得るように、信号を処理する方法を改善することによって、赤外光ビーム、超音波または磁気パルスビーム(1)への体の曝露を削減する方法であって、以下を本質とする方法に関する:矩形行列の各点または領域に付随する推定値を保有するための最初の像を作り出すこと;最初の行列から増幅行列を得るため、2点間で値を補間することによってまたは、領域の分割から得られるミクロ領域内に領域の値を分配することによって評価すること;検査領域(20)を調査する交差シリーズに沿った物理的走査(19)によって、行列の境界値を計算するよう、各走査の2境界間での変化を測定すること;および像のより細かな分解能を得るよう、境界に関する制約を考慮した最小二乗法による調整を用いて、各項の値を調整すること。 (もっと読む)
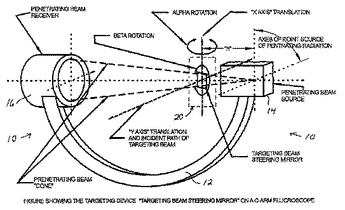
ターゲット捕捉システムとターゲット捕捉の方法
調整可能な光学集合体を提供し、貫通ビーム源、貫通ビーム受光器を有する結像系と用いるためのターゲット捕捉システム。この光学集合体は、ターゲット捕捉標識を線源により放射される貫通ビームの経路上に有している。このターゲット捕捉標識は、この線源により放射される貫通ビームに対して少なくとも部分的に不透明であり、このターゲット捕捉標識は、ターゲット軸上のターゲット捕捉点を示している。光学集合体は、ターゲット軸と同軸で一致している検知可能なターゲット捕捉ビームを発生させることができる検知可能なターゲット捕捉ビーム装置をさらに有する。加えて、上述のようなターゲット捕捉システムをアラインメントする方法と、関心領域をターゲット捕捉する方法とが与えられている。このシステムと方法との1つの有利な点は、これが2点アラインメントのみを必要としていることである。
 (もっと読む)
(もっと読む)
医療適用で画像位置合わせ及び画像操作を容易とするプローブ位置測定
【課題】 画像形成中にセンサ位置及び向きを正確に知ることができる医療画像処理に関する方法を提供することを目的とする。
【解決手段】 医療画像処理適用に関連する画像を位置合わせするのに撮像プローブを用いる方法は、(a)撮像プローブがその中で用いられるローカルな領域中にフィールドを発生するローカル追跡システムを設ける段階と、(b)略同じ対象を表わす第1及び第2の画像を捕捉する段階と、(c)画像捕捉中の撮像プローブの位置座標を決定するのにローカル追跡システムからのフィールド放射を感知する段階と、(d)第1及び第2の画像を位置合わせするのに位置座標を用いる段階と、(e)対象の特徴を決定するのに位置合わせされた画像を用いる段階とを有する。
(もっと読む)
101 - 106 / 106
[ Back to top ]