
Fターム[4C097CC09]の内容
補綴 (46,288) | 補綴・代替物の構造 (10,300) | 身体への装着構造 (333) | 装着部材の形状、構造又は取着 (279) | 装着ベルトの身体装具等への配置 (15)
Fターム[4C097CC09]に分類される特許
1 - 15 / 15
作業用補助具
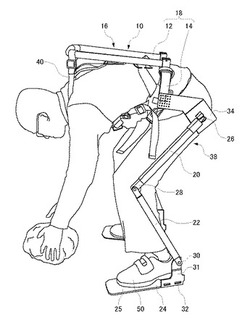
【課題】作業者への補助力を向上させた作業用補助具を提供する。
【解決手段】作業用補助具10において、ベース機構38は、作業者の足裏と地面の間に配される底部24を有する。吊り機構16は、ベース機構38により支持され、作業者の背面側に配される吊りフレーム18を有する。連結部は、吊り機構16とベース機構38とを回動可能に連結する。規制手段は、吊り機構16が傾倒してベース機構38の連結部分に対して所定の角度まで回転すると、吊り機構16の傾倒を規制する。
(もっと読む)
動作アシスト装置及び装着具

【課題】アシスト力を発生させるためのアクチュエータが不要で、利用者が装着している状態においてもアシスト機能の遮断が可能な動作アシスト装置を提供する。
【解決手段】互いに揺動可能な複数の背骨部材3を連結してなり、利用者の背中に装着される背骨ユニット2と、利用者の前屈姿勢時に復元力を発生させる作用状態と復元力を発生させない非作用状態とに切り換え可能で、背骨ユニット2に取り付け可能な弾性部材7と、を備えた。
(もっと読む)
筋力補助装置
【課題】従来の装置よりも大きな補助力をユーザに与えることができる筋力補助装置を提供する。
【解決手段】筋力補助装置100は、腰ハーネス20、背ハーネス10、ガイドプーリ16、及び、ワイヤを巻き上げるための巻き上げ器22を有している。腰ハーネス20は、ユーザの腰に装着される。巻き上げ器22は、腰ハーネス20に取り付けられている。背ハーネス10は、ユーザの背に装着される。ガイドプーリ16は、背ハーネス10に支持されており、ユーザの背中後方に配置される。巻き上げ器22から伸びているワイヤWが、ガイドプーリ16を介してユーザの背の上部に相当する位置で背ハーネス10に固定されている。ガイドプーリ16によって背の上部を後方から引っ張るようにワイヤWを配索するので、背屈方向に大きなモーメントをユーザに与えることができる。
(もっと読む)
装着式動作補助装置
【課題】本発明は駆動部の駆動力を動作補助手袋に効率良く伝達することを課題とする。
【解決手段】装着式動作補助装置10は、装着者の指に装着される動作補助手袋20からなり、通常の動作補助手袋と同様に装着される。動作補助手袋20には、被駆動部30と、駆動部40と、線状部材50と、生体信号検出部60と、制御ユニット70とが設けられている。動作補助手袋20は、装着者の手に密着するように手のサイズに合わせた立体的な形状に形成されている。動作補助手袋20の手甲側には、複数の線状部材50が各指の延在方向に沿うように配されている。複数の線状部材50が、伸展方向または屈曲方向に動作すると共に、動作補助手袋20の各指も線状部材50と一体に伸展方向または屈曲方向に動作する。
(もっと読む)
歩行補助装置
【課題】ユーザの足によくフィットする歩行補助装置を提供する。
【解決手段】歩行補助装置は、脚装具と足底装具26が足首ジョイント24で連結されている。脚装具は、ユーザの脚に沿って配置される。足底装具26は、ユーザの足底に固定される。足底装具26と足首ジョイント24は、ユーザの足首のヨー軸CLを中心として揺動する揺動部材44を介して連結されている。足底装具26は、ユーザの足首のヨー軸CLを中心として足首ジョイント24に対する取り付け角度を調整することができる。
(もっと読む)
運動補助装置
【課題】演算処理負荷の軽減を図りながら、当該エージェントの運動を補助することができる装置を提供する。
【解決手段】アクチュエータ15の動作の制御基礎としての基礎振動子ξを生成するための演算処理に一のモデルのみが用いられるので、当該一のモデルに加えて他のモデルが用いられる場合と比較して当該演算処理の負荷が軽減されうる。さらに、モデルからの出力振動信号である基礎振動子ξの角速度または位相の時間変化率に反映される固有角速度ωが、このモデルへの入力振動信号である運動振動子φにより定義されるエージェントPの運動周期Tに基づき、連続的または断続的な減少関数にしたがって流動的に設定される。そして、最新の固有角速度ωにより定義されるモデルにしたがって基礎振動子ξが生成され、この基礎振動子ξに基づいてアクチュエータ15からエージェントPに伝達されるトルクτの振幅および位相が制御される。
(もっと読む)
運動アシスト装置および歩行アシスト装置およびそれらに用いられるアクチュエータユニット
【課題】歩行アシスト装置のアクチュエータユニットに障害物が当たっても、アクチュエータユニットのアクチュエータや内蔵品、歩行アシスト装置着用者に大きい衝撃荷重が作用しないようにすること。
【解決手段】アクチュエータ100L、100Rの外側を覆蓋する外側カバー110L、110Rを、弾性変形による衝撃吸収性を有するものとする。
(もっと読む)
人工装具を脊髄分節に結合するための方法および装置
患者の脊髄分節に人工装具を結合するための方法は、脊髄分節に沿って配置される、第1および第2の基準点を選択するステップと、標的距離を手術前に測定するステップとを含む。標的距離は、患者が起立位置等の好ましい姿勢である間に第1の基準点と第2の基準点との間に延在する。人工装具は、脊髄分節に結合され、次いで、人工装具は、標的距離に基づいて、第1の基準点と第2の基準点との距離を設定するために、手術中に調節される。  (もっと読む)
(もっと読む)
歩行補助装置
【課題】足に障害のある利用者の歩行を正常歩行に近づけることが可能な歩行補助装置を提供する。
【解決手段】本願の歩行補助装置Sは、利用者の膝関節を屈曲及び伸展させるリンク機構部3と、前記リンク機構部を動作させるための駆動モータと、予め記憶された歩行パターンに基づいて前記駆動モータを回転制御する回転速度制御手段19と、を備えた歩行補助装置Sであって、前記利用者の歩行におけるどちらか一方の足の歩行パターンを取得する歩行パターン取得手段を更に備え、前記回転制御手段は、取得した前記歩行パターンに基づいて前記駆動モータを回転制御する。
(もっと読む)
歩行補助装置の制御装置
【課題】両脚リンクにそれぞれ床側から作用する支持力の相互の割合いが、利用者の両脚のそれぞれの実際の踏力の相互の割合いに対して不整合なものとなるのを抑制する。
【解決手段】利用者Pの両脚のそれぞれの踏力の計測値の総和Fft_allが所定値よりも大きいか否かを判断する手段(S101)と、その判断結果が否定的になった場合に、利用者両脚のそれぞれの踏力の計測値に応じて両脚リンク3,3のそれぞれに床側から作用する支持力の相互の設定割合を決定する代わりに、床側から各脚リンク3に作用する支持力などを参照パラメータとして用い、上記判断結果が否定的となる直前における該参照パラメータの観測値または目標値に応じて前記設定割合を決定する手段(S102〜S106)とを備える。
(もっと読む)
アシスト装着具
【課題】 様々な姿勢により生ずる筋負担を、応答性よく軽減することが可能なアシスト装着具の提供。
【解決手段】 アシスト装着具1は、人体の背部に配置される復元パッド3と、復元パッド3を人体に固定するための右肩固定ベルト5、左肩固定ベルト9、右腰部固定ベルト15、左腰部固定ベルト19、右大腿部固定ベルト33、左大腿部固定ベルト35、左右大腿部背部接続ベルト39、右大腿部前部接続ベルト25、および左大腿部前部接続ベルト29等により構成されている。これらにより復元パッド3を人体背部の所定位置に配置し、様々な姿勢により復元パッド3が変形した場合に、元の形状に戻ろうとする復元力を上記各ベルトを介して人体に伝達することによって、筋負担を軽減することができる。
(もっと読む)
胸部保形具
【課題】乳房切除術により少なくとも一方の乳房が切除された女性の整姿ならびに重量バランスの調整をする胸部保形具を提供する
【解決手段】 擬似乳房形状にとなった保形部材と、該保形部材裏面の胸当て面に設けられた空洞部と、前記保形部材下部に垂下するように延設され任意のブラジャー装着時において保形部材を支える支持力を有するストッパーとよりなるとより構成される。
(もっと読む)
上肢挙上作業用支援装置
【課題】上肢挙上作業における上肢の荷重分散をはかり、動作負担又は作業負担を軽減することにより、頸肩腕障害、肩関節周囲炎などの疾病の発生を予防する。
【解決手段】上肢挙上作業用支援装置Xが、背負子式に身体装着され、1対又は左右に分枝拡開した棒状アーム11の一端を、それぞれ両肩越しに両耳近傍まで延伸し、かつ、前面に臨ませて形設した体幹装具1と、棒状アーム11のそれぞれの先端に取り付けた1対の定荷重ばね2〔荷重調整手段〕と、左右の上腕部に巻回装着する1対の上腕保護部材3と、定荷重ばね2と上腕保護部材3との間に懸け渡した1対の懸吊部材4を具備する。そして、上腕保護部材3に左右の腕を通してそれぞれの上肢を身体の前方に挙上支援する。また、両肩部の装着ベルト12の左右胸部に1対のアームレスト部材51(5)を取着して、上肢を挙上保持する。
(もっと読む)
装着式動作補助装置、装着式動作補助装置の制御方法および制御用プログラム
【課題】本発明は装着者に与える違和感を可及的に抑えることができる装着式動作補助装置、制御方法および制御用プログラムを提供することを課題とする。
【解決手段】装着式動作補助装置は、アクチュエータ201を有した動作補助装着具2と、生体信号を用い、装着者1の意思に従った動力をアクチュエータ201に発生させるための随意的指令信号を生成する随意的制御手段14と、物理量センサ13により検出された物理量とデータベース6に格納された基準パラメータとを比較することにより、装着者1のタスクのフェーズを推定し、推定したフェーズに応じた動力をアクチュエータ201に発生させるための自律的指令信号を生成する自律的制御手段7と、随意的制御手段4および自律的制御手段7からの指令信号を合成する信号合成手段8と、信号合成手段8により合成された総指令信号に応じた電流を生成し、アクチュエータ201に供給する駆動電流生成手段5とを備える。
(もっと読む)
筋力補助装置
【課題】 衣服を着けるのと同時に装着でき、且つ機構部分が外部から見えないように隠すことができる筋力補助装置を提供する。
【解決手段】 ズボン2に第1〜第3アーム部材3〜5と駆動制御部14とを取り付け、これら第1〜第3アーム部材3〜5に第1、第2ジョイント部材12、13、第1〜第6ベルト6〜11、および第1、第2伝達ワイヤー15、16を組み付けた。従って、ズボン2をはくだけで、第1〜第3アーム部材3〜5と駆動制御部14とを身体に装着できるほか、第1〜第3アーム部材3〜5を回動可能に連結する第1、第2ジョイント部材12、13、および第1、第2伝達ワイヤー15、16などの機構部分をも同時に身体に着けることができる。また、この機構部分がカバー部材30によって開閉可能に覆われているので、機構部分が外部から見えないように隠すことができ、これにより見た目上、違和感なく日常生活を行うことができる。
(もっと読む)
1 - 15 / 15
[ Back to top ]