
Fターム[4C097TB05]の内容
補綴 (46,288) | 義肢の動作;調節;操作 (438) | 調節機構 (94) | 折曲げ解除;施錠 (55) | 折曲げ角度調節 (43)
Fターム[4C097TB05]に分類される特許
1 - 20 / 43
歩行支援装置
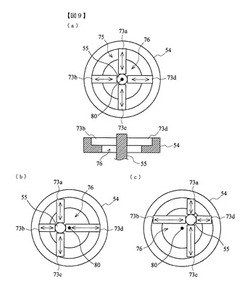
【課題】二重関節において歩行アシストに適するように変動過度特性を動的に調整する。
【解決手段】歯車54は、中央にザグリ部75を有する貫通孔76が形成されている。ザグリ部75の内周側には、伸縮する偏心アクチュエータ73a〜73dが十字状に設置されている。偏心アクチュエータ73b、73dは、固定軸55の両側に対向して配置されており、端部は、固定軸55の両側を挟持している。偏心アクチュエータ73a、73cは、偏心アクチュエータ73b、73dの軸線に対して垂直な方向において、固定軸55の両側に対向して配置されており、端部は、固定軸55の両側を挟持している。偏心アクチュエータ73a〜73dを駆動して歯車54の回転軸を中心点80から貫通孔76内の任意の点に偏心させる。
(もっと読む)
装着式動作補助装置

【課題】装着者の負担を軽減して作業効率を高める装着式動作補助装置を提供する。
【解決手段】装着者12は、装着式動作補助装置10が装着された状態で防護服14及び頭部保護具16を装着する。動作補助装置10は、腰支持体30に当該装着者12の上体を囲むように形成された上体フレーム210が取り付けられている。上体フレーム210は、当該装着者12の右側に位置する第1上フレーム220と、当該装着者12の左側に位置する第2上フレーム230と、第1上フレーム220と第2上フレーム230との間を連結する連結部240とを有する。防護服14を着用する際は、第1上フレーム220及び第2上フレーム230の肩支持部222、232が防護服14の肩部内側に当接する。従って、防護服14の質量は、腰支持体30に固定された上体フレーム210に支持され、装着者12には作用しない。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行アシストにおいて、より段差の高い階段をも上ることができるようにする。
【解決手段】通常階段を上る場合、太ももを持ち上げるとともに膝を曲げることで、膝から下の脛の部分を鉛直方向に垂らした状態で足を階段の上に乗せながら上っている(膝曲げ上り)。このため、足を最大上げた場合の高さh1が階段の段差Hよりも高く上がらないと階段を上ることができない。そこで股関節を限界角度θ1まで上げた状態でも足を階段の高さよりも高く上げられない場合には、膝を伸ばすことで足をより高く(h2)上げながら階段を上るようにする(膝伸ばし上り)。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者の筋力に応じた歩行支援を行う。
【解決手段】装着型ロボット1(図1)は、超音波センサ35によって装着者の大腿部の筋厚と皮脂厚を測定し、これによって装着者の骨格筋率(体組成情報)を推定する。装着型ロボット1は、予め様々な被験者の骨格筋率の平均値を記憶しており、装着者の骨格筋率が平均値よりも小さい場合は、アシスト力を強めに調節し、平均値よりも大きい場合はアシスト力を弱めに調節する。即ち、装着型ロボット1は、装着者の骨格筋率によって装着者の脚部の筋力を推定し、筋力が弱い場合にはアシスト力を強めに設定し、筋力が強い場合はアシスト力を弱めに設定する。このように、装着型ロボット1は、装着者の脚部の筋力の個人差に応じて自動的にアシスト力を調節するため、装着者は、筋力の個人差によらずに快適な歩行支援を受けることができる。
(もっと読む)
動作制御式足ユニットのためのシステム及び方法
【課題】動作制御された肢、特に、足首が動作制御された義足を有するシステム及び方法を提供する。
【解決手段】補装具100の下肢部材102の下端部は、旋回軸アセンブリ114で足ユニット104と連結される。図示されているように、下肢部材102は、足ユニット104のつま先部から略後方で且つ上向きに延びる足ユニット104の足首板と連結されている。旋回軸アセンブリ114は、下肢部材102に関する足ユニット104の角運動を可能にする。システムは、足ユニットと下肢部材との間の角度を積極的に制御又は調節するアクチュエータ116を備える。処理モジュールは、センサモジュールから得たデータをもとにアクチュエータの動きを制御する。例えば、検出するモジュールのデータは、使用者の歩行に関連する情報を含み、健常な足首の自然な動きを実質的にまねるように足ユニットを調節するために使用される。
(もっと読む)
ロボティックスーツ
【課題】人体の運動機能の補助、歩行アシスト等を好適に行えるスーツとして、人との同調性を高めたロボティックスーツを提供する。
【解決手段】人体の屈曲可動部位に対応して配置される関節部と、前記関節部間を連結して人体に装着されるリンクと、前記関節部を支点として前記リンクを回動するアクチュエータと、人体とスーツとの相互作用力を検出するセンサとを備え、前記アクチュエータの駆動を制御する制御系として、前記センサによって検出された前記相互作用力に基づいて、人とスーツとの同調の度合いを調整する調整部50と、調整部50により調整された入力に同調する出力を算出する解析部60と、解析部60の出力に基づき、前記アクチュエータをフィードバック制御する制御部70とを備える。
(もっと読む)
外骨格型ロボット
【課題】従来の外骨格型ロボットにおいては、体幹・下肢部の運動支援を適切に行えない。また、電動モータや油圧アクチュエータを用いる事例があるが、大きな負荷を発生するものは装置の自重が大きい。また、負荷を支えるだけの場面においてもアクチュエータがエネルギーを消費するために、エネルギー効率が悪い。
【解決手段】ベースと下半身とを有する外骨格型ロボットであって、左右の足首、左右の膝、および腰の左右の各位置に配置されている能動の関節である能動関節と、能動関節を動作させる制御部とを具備し、能動関節は、エアマッスルと電動モータとを具備する外骨格型ロボットにより、上記の課題が解決できる。
(もっと読む)
電動把持部材
【課題】簡易な構造であって小型化・軽量化できる筋電義手を提供することを目的とする。
【解決手段】この発明の電動把持部材1は、指部材支持部2と、指部材支持部3に対して往復運動するスライド部材3と、スライド部材3を駆動する電動モータ4と、第1指部材5と、第2指部材6とを有し、電動モータ4によって第1指部材5と第2指部材6を開閉させるもので、第1指部材5と第2指部材6はそれぞれスライド部材3に取り付けられるスライド部材接続部8と指部材支持部2に取り付けられる指部材支持部接続部9を有し、第1指部材5とスライド部材接続部8aおよび指部材支持部接続部9aは一枚の板状部材の折り曲げにより形成されており、第2指部材6とスライド部材接続部8bおよび指部材支持部接続部9bも一枚の板状部材の折り曲げにより形成されている。
(もっと読む)
下肢装具
【課題】歩行動作中の足の状態に応じて中立揺動角を変更することのできる下肢装具を提供する。
【解決手段】下肢装具10は、下腿部材12と、足部材14と、コイルバネ22と、コイルバネの中立揺動角を変更できる調整部20を備える。調整部20は、足部材14が接地している場合の中立揺動角を、足部材14が接地していない場合の中立揺動角よりも底屈側に変更する。こ下肢装具10は、中立揺動角を底屈側に変更することによって、立脚の下腿が足を中心として前方へ揺動する際(即ち足が背屈する際)、下腿の揺動を抑える向き(足を底屈させる方向)に加わるバネ復元力を変更する前に比べて増大させることができる。
(もっと読む)
下肢の矯正用または補装用の関節を制御するための方法
本発明は、抵抗手段を有する、下肢の矯正用または補装用の関節を、制御するための方法であって、該抵抗手段に関連して、センサデータに従って屈曲抵抗および/または伸展抵抗を変化させる少なくとも1つのアクチュエータが設けられており、関節の使用の最中に、センサによって、状態情報が提供されてなる方法に関する。センサデータは、少なくとも2つのモーメントまたは1つのモーメントおよび1つの力を検出するための少なくとも1つの手段によって決定される。決定された値のうちの少なくとも2つの値のセンサデータが、数学的操作によって互いに組み合わされ、従って、屈曲抵抗および/または伸展抵抗の制御に基づく少なくとも1つの補助変数が計算される。 (もっと読む)
動作補助装置
【課題】人の動作を適切に補助することのできる動作補助装置を提供する。
【解決手段】動作補助装置は、人の特定関節にトルクを加えるアクチュエータ、記憶ユニット、センサ、及び、アクチュエータを制御するコントローラを備える。センサは、人の予め定められた既定部位の動作パターンを計測する。記憶ユニットは、既定部位の異なる動作パターンの夫々を記述した第1動作パターン群を記憶している。さらに、記憶ユニットは、特定関節の異なる第2動作パターン群の夫々を実現するための目標角度パターンを第1動作パターン群の夫々に対応付けて記憶している。コントローラは、計測された動作パターンに最も近い第1動作パターンを第1動作パターン群の中から選択する。コントローラはさらに、選択された第1動作パターンに対応付けられている目標角度パターンに、特定関節の角度を追従させるようにアクチュエータを制御する。
(もっと読む)
義足または下肢装具を用いて立ち上がりのシーケンスを実装すること
膝装具または義肢は、人が座位にいる間に、人の足関節に対する人の膝の位置に基づいて立ち上がりのシーケンス始動させるのが適切であるときに、自動的に使用され得る。膝が、足関節の前である位置に動かされるときに、装具または義肢の少なくとも1つのアクチュエータが、座位から立位へ人を持ち上げることを助けるように作動される。少なくとも1つのセンサーは、大腿座標システムに対して重力ベクトルを測定する慣性センサーを含む。少なくとも1つのセンサーは、大腿に対して下肢の回転角を検出する。 (もっと読む)
装着式動作補助装置
【課題】本発明は駆動部の駆動力を動作補助手袋に効率良く伝達することを課題とする。
【解決手段】装着式動作補助装置10は、装着者の指に装着される動作補助手袋20からなり、通常の動作補助手袋と同様に装着される。動作補助手袋20には、被駆動部30と、駆動部40と、線状部材50と、生体信号検出部60と、制御ユニット70とが設けられている。動作補助手袋20は、装着者の手に密着するように手のサイズに合わせた立体的な形状に形成されている。動作補助手袋20の手甲側には、複数の線状部材50が各指の延在方向に沿うように配されている。複数の線状部材50が、伸展方向または屈曲方向に動作すると共に、動作補助手袋20の各指も線状部材50と一体に伸展方向または屈曲方向に動作する。
(もっと読む)
装着式動作補助装置及びその制御方法
【課題】本発明は、回動装置を使用する際の消費エネルギを節減するとともに、回動装置やこれを駆動する駆動装置の磨耗や損傷を抑制することを課題とする。
【解決手段】装着式動作補助装置1は、複数の回動軸(12a、12c、14a)を介して連結された複数の部材(体幹部材11、上腕部材13、前腕部材15)を有し、回動軸を中心とした一の部材に対する他の部材の相対的な回動運動を実現させる動作補助装着具10を備えるとともに、動作補助装着具10による複数の回動運動のうち少なくとも何れか一つを抑制する回動抑制手段(ロック機構30、回動抑制部62)を備える。
(もっと読む)
装着型動作支援装置
【課題】関節の遠位身体部位の動作を規制しないようにする。
【解決手段】関節の遠位身体部位に装着される第2サポート部材は、第1サポート部材に連結されるアウター部材80と、アウター部材80に対して回転変位可能に配設されて該遠位身体部位に装着されるインナー部材81とを備える。インナー部材81は、開閉可能に連結された第1インナー半体105および第2インナー半体106からなり、開放させて遠位身体部位にセットし、閉成して該遠位身体部位に装着される。従って、遠位身体部位に回転を伴う捻り動作をすると、アウター部材80に対してインナー部材81が回転変位するので、該遠位身体部位の捻り動作をスムーズに行ない得る。
(もっと読む)
手首補助装置
【課題】関節の回動軸と、装具の回転軸とがずれていても、関節の屈曲、伸展動作をスムーズに行うことができ、使用者に過度の負荷が加わることのない手首補助装置を提供すること。
【解決手段】本発明の手首補助装置は、手を支持する掌支持部材10と、掌支持部材10の側部に連結される角度変更部材20と、前腕に沿って配置される前腕装着具30と、前腕装着具30に対して角度変更部材20の回転軸を形成する関節部材40を備え、角度変更部材20を掌支持部材10の両側部にそれぞれ設け、それぞれの角度変更部材20に対して関節部材40を設け、それぞれの関節部材40を手首の両側部に位置させたことを特徴とする。
(もっと読む)
装着式動作補助装置、基準パラメータデータベース構築装置、装着式動作補助装置における駆動制御方法、基準パラメータデータベース構築方法、及びそのプログラム
【課題】装着者の所望する一連の動作を円滑且つ最適に行う。
【解決手段】動作補助装着具により装着者の動作を補助或いは代行する装着式動作補助装置において、前記装着者の動作に応じた関節角度を検出する第1の検出手段と、前記装着者の筋活動に伴う生体信号を検出する第2の検出手段と、前記装着者の関節角度と生体信号とを関連付けて設定したフェーズデータが、フェーズの種類毎に分類されたフェーズグループからなる基準パラメータを格納した格納手段と、前記第1の検出手段により検出された関節角度を前記基準パラメータの関節角度と比較することにより、前記装着者の動作のフェーズを判定するフェーズ判定手段と、前記フェーズの属するフェーズグループの中から所定のフェーズデータを選出するフェーズデータ選出手段と、選出されたフェーズデータに応じた動力を駆動源に発生させるための指令信号を生成する制御手段とを有する。
(もっと読む)
整形外科用の足部および整形外科用の足部を制御するための方法
【課題】従来のタイプの整形外科用の足部を、整形外科用の足部の特性への従来よりも多い要求が、踝関節を中心とした動きの制動のもっぱらパッシブな制御プロセスによって、応じられるように、制御可能に構成する。
【解決手段】センサ装置は、下腿接続部と足部10との間の角度を測定する踝角度センサ7と、垂直線に対する絶対角度センサ20と、踝関節5におけるトルクまたは踝関節5におけるトルクを発生させる力を検出するためのモーメント・センサ21とを有する。
(もっと読む)
義足足部または足矯正器の形態のパッシブな整形外科用の補助手段
【課題】義足足部または足矯正器の形態のパッシブな整形外科用の補助手段によって、自然な足の挙動への適合を改善する。
【解決手段】制動装置は、ピストンによって互いに分離されている2つの液圧チャンバを有する複動の液圧シリンダであり、これらの液圧チャンバは、圧液の流れを逆方向にのみ可能にする2つの接続ラインによって、接続ラインの流れ抵抗は、制御によって別個におよび各々の自らの調整手段によって調整可能であり、プロセッサ装置は、センサ装置の測定されたパラメータから実際の中立点位置を確定するために設計されており、2つの接続ラインにおける流れ抵抗のための制御信号が、中立点位置に関して発生される。
(もっと読む)
整形外科用膝関節ならびに整形外科用膝関節を制御する方法
本発明は、上方の接続手段(20)が設けられていてなる上部(2)と、この上部(2)に枢動可能に取り付けられておりかつ整形外科用構成要素(4)のための接続手段を有する下部(3)と、伸展運動を制限するためのストッパ(7)とを具備する整形外科用膝関節に関する。ストッパ(7)は、移動可能に形成されており、かつ調整手段(64)に接続されており、この調整手段は、センサデータに従って調整手段(64)を作動しかつストッパ(7)の位置を変える制御手段(6)に接続されている。 (もっと読む)
1 - 20 / 43
[ Back to top ]