
Fターム[4F035CD19]の内容
噴霧制御装置 (2,732) | スプレーヘッドの噴霧時の運動、駆動制御 (320) | 検出に基づく制御 (27)
Fターム[4F035CD19]に分類される特許
21 - 27 / 27
非矩形状物体の漸次的噴射のための噴射システム
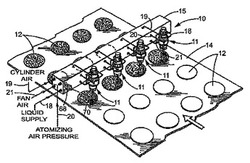
スプレーガン又はノズルの制御のためのシステム及び方法であって、移動する対象物体又は移動する対象物の一部の寸法に対応するようにスプレーガン液体放出パターンが動的に変えられるシステム及び方法。スプレーガンは、ファンエア、霧化エア、液体及びシリンダエアのための入力を含んでいる。例えばコンベアベルト上で近づいてくる対象物体の検出時に、対象物体又は対象物体の一部の形状に対応するスプレーパターンを与えるための所定の或いは同時形成された曲線にしたがってファンエア圧力、霧化エア圧力、液体圧力、シリンダエア圧力が変えられ、それにより、過剰噴射に起因する無駄及び非効率さが最小限に抑えられる。 (もっと読む)
基板載置装置

【課題】 ステージの移動とステージ上の基板を持ち上げる機構とを両立しながら、装置の耐久性向上およびコストを低下させる基板載置装置を提供する。
【解決手段】 本発明の基板載置装置2のステージ21は、基板をその上面に載置して移動する。ピン機構26は、ステージ21の上面に対して昇降可能に設けられ、ステージ21に載置された基板を持ち上げる。突き上げ板27および上下駆動部28は、ステージ21とは別体で固設され、ピン機構26と当接してステージ21の上面から突出させる。センサ271は、ピン機構26の位置を検出する。制御部は、センサ271の検出結果に基づいて、ステージ21が所定の位置に配置された際、上下駆動部28を駆動させてピン機構26を上昇させる。
(もっと読む)
複合材料成形品またはフィルムを製造するデバイスおよび方法
【課題】
材料の不均等な分配およびオーバースプレーの発生などの問題点を解消して、複雑な複合材料成形品またはフィルム(スキン)を大規模に製造するため方法およびデバイスを提供する。
【解決手段】
反応性プラスチックによって形成される少なくとも1つの層を有する一層もしくは複層積層フィルムまたは複合材料成形品を製造するための方法であって、スプレー・ノズルから液体の反応性混合物を表面に噴霧することを含み、振動するジェット・スプレーを表面に適用し、噴霧の間にジェット・スプレーの振動の振幅および/または周波数を調節して、ジェット・スプレーによってカバーされる表面領域を変化させることを含む方法を提供する。
(もっと読む)
ダイカストマシンのスプレー装置
【課題】
スプレーノズルのサイクル時間が短くなるようにスプレーノズルの移動工程を設定し、生産の向上を図る。
【解決手段】
ダイカストマシン11の型開きからスプレーノズル10Aの噴射動作に至る待機位置aから噴射位置cに至るスプレーノズル10Aの移動工程と、噴射位置cから待機位置aへと戻る移動工程とが異なり、戻る移動工程において、キャビティ12の深さに相当する距離L1だけスプレーノズル10Aを後退(水平前進工程W2の移動距離分)させた後、スプレーノズル10Aを追い込み移動工程W3の移動距離と同じ距離だけ戻るように後退しながら上昇させることによって、スプレーノズル10aは傾斜した移動軌跡を描いて上昇し、キャビティ12の外側へと最短距離で移動する。
(もっと読む)
作業設備
【課題】 ワークの位置を常に正確に検出することができる作業用ロボットの制御装置を提供すること。
【解決手段】 作業設備Eは、ワークを搬送する搬送装置2と、この搬送装置2により搬送されるワークに対し作業を行う作業ロボット1とを備えている。搬送装置2は、搬送経路を規定するレール29と、ワークの一つに対して複数設定されレール29上を走行するトロリ22と、このトロリ22間を連結する連結バー23と、トロリ22または連結バー23上に固定されワークを位置決めした状態で載置可能な搬送台24と、少なくともトロリ22および連結バー23の移動量Sを検出するセンサ3とを備えている。作業ロボット1は、センサ3で検出したトロリ22および連結バー23の移動量Sに基づき制御されてワークに対し作業を行うように構成されている。
(もっと読む)
画像を表面に塗布するための装置および方法
グラフィック画像を表面に塗布するためのシステム(30)および方法を開示する。一実施形態において、システムが、表面(34)に顔料インクの液滴パターンを向けるためのアプリケータ(32)と、アプリケータ(32)に連結され、表面(34)に対して少なくとも1つの横方向に、そしてまた表面(34)に対して垂直方向にアプリケータ(32)を移動させる動作装置(36)と、グラフィック画像に対応するデータを受信し、少なくとも動作装置(36)の運動を制御して表面(34)にグラフィック画像を塗布するように構成される、動作装置(36)に連結されたコントローラ(38)とを含む。別の態様において、方法が、画像源から画像ファイルを受信することと、表面の幾何学的形状を説明する表面モデルを生成することとを含む。ついで、アプリケータ(32)が表面モデルにしたがって制御され、画像ファイルに対応するグラフィック画像が塗布される。  (もっと読む)
(もっと読む)
液状物質塗布機の昇降装置
被塗布体と吹付けアセンブリーとの距離を調節可能な液状物質塗布機の昇降装置が開示される。昇降装置は、所定の本数が立設され、その外周面には螺旋状ネジ山が形成されると共に、駆動モーターにより選択的に回転する回転軸と、被塗布体が載置される移送テーブルを支持するように前記回転軸に配設され、内面には前記螺旋状ネジ山と嵌合する螺旋状ネジ山が形成されると共に、前記回転軸が回転することにより前記移送テーブルを昇降させる昇降部材と、を備える。 (もっと読む)
21 - 27 / 27
[ Back to top ]