
Fターム[5B057CD14]の内容
Fターム[5B057CD14]に分類される特許
201 - 220 / 978
再構成演算装置、再構成演算方法、及びX線CT装置

【課題】 医用診断に有効なX線CT画像をより高速かつ正確に作成することが可能な再構成演算装置、再構成演算方法、及びX線CT装置を提供する。
【解決手段】 再構成演算装置45は、所定のスキャン軌跡を用いた撮影により取得されたX線投影データに対して逐次近似処理を含む第1の再構成処理を用い、コーンビームアーチファクトを低減した画質良好な第1画像を生成する。その後、第1画像に対して、撮影時よりアーチファクトの混入の少ないスキャン軌跡にて仮想的な順投影を行い、その順投影データに基づいて、例えば所望の周波数、FOV等を設定して解析的な再構成法にてCT画像を再構成する(第2の再構成処理)。これにより、第1画像の画質を保ちつつ、所望の特性を持つ最終的な画像を生成する。
(もっと読む)
モデル入力装置およびモデル生成システム

【課題】高精度に対象物の動立体モデル(三次元動画像データ)を取得することができるモデル入力装置およびモデル生成システムを提供する。
【解決手段】モデル入力装置は、対象物の色彩データを取得する撮影部10cと、可視光以外の波長を有する光を前記対象物へ照射する照射部10aと、前記対象物で反射された前記光を受光する受光部10bと、内部に前記撮影部と前記照射部と前記受光部とを備えるユニット10と、前記撮影部で得られた前記色彩データと前記受光部で得られた反射光に関する情報とをコンピュータへ出力可能なインターフェースと、を備える。
(もっと読む)
多眼撮像装置および多眼撮像方法
【課題】複数のカメラを用いた高精細合成処理において、処理量を大幅に増加させることなく対応点探索ができなかったオクルージョン領域または対応点検出エラー領域の画質劣化抑制を実現することが可能な多眼撮像装置および多眼撮像方法を提供する。
【解決手段】多眼撮像装置は、画像を撮像する複数系統の撮像部と、撮像部のうち、基準となる第1の撮像部の出力映像と、第1の撮像部と異なる複数系統の撮像部のうち少なくとも1つの撮像部の出力映像とから被写体までの距離情報を算出する距離算出部と、距離算出部において距離情報を算出できた領域について、その距離情報に基づき複数系統の撮像部の出力映像から合成映像を生成する多眼映像合成処理部と、距離算出部において距離情報が算出できなかった領域について、第1の撮像部の出力映像から合成映像を生成する単眼映像合成処理部とを備える。
(もっと読む)
3次元画像を取得するための方法
3次元画像を取得するための方法である。静止して第1の姿勢にある対象の始点ボリューム画像を取得する。対象が第1の姿勢と第2の姿勢との間で動いた時に、対象の1つ以上の2次元画像を取得する。静止して第2の姿勢にある対象の終点ボリューム画像を取得する。第1の姿勢と第2の姿勢との間の対象の位置を表す、少なくとも1つの中間ボリューム画像を形成するために、1つ以上の取得した2次元画像に従って、少なくとも始点ボリューム画像を修正する。少なくとも1つの中間ボリューム画像を表示することができる。 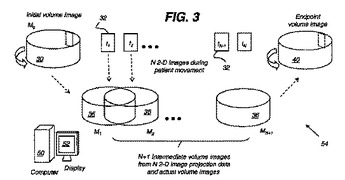 (もっと読む)
(もっと読む)
運転支援装置
【課題】カーナビゲーション装置を搭載していない車両であっても、交差点における一時停止を予測し、それを的確に報知することができるようにする。
【解決手段】車両制御部12は、車両に搭載したカメラユニット10で撮影した画像データに基づいて、交差点6を検出し、次いで当該交差点6に信号機3が有るか否か、停止標識4が有るか否か、停止線5が有るか否かを調べる。そして信号機3の信号灯色が赤色或いは黄色であり、或いは停止標識4が検出され、或いは停止線5が検出された場合であって、自車両1が停止線5に到達するまでの距離Lが注意報知距離L1以内で(L≦L1)、且つ車速Vが設定車速V1以上の場合、警報装置14から運転者に注意を促す警報を発生させる。
(もっと読む)
医用画像表示装置および方法、並びにプログラム
【課題】複数の3次元医用画像の各々から再構成された断面画像の比較表示に先立って行われる位置合わせ処理に関する操作性のさらなる向上を実現する。
【解決手段】自動位置合わせ処理部34が、複数の3次元医用画像の内容的特徴に基づいて画像中の被検体の解剖学的位置を合わせる位置合わせ処理を行い、位置合わせ処理の結果と、位置合わせ処理の確からしさを表す位置合わせ確度とを出力し、断面画像生成部37が、3次元医用画像の各々と位置合わせ処理結果とに基づいて、3次元医用画像間で相対応する所与の断面を表す断面画像を3次元医用画像毎に生成し、表示制御部38が、生成された断面画像の各々を表示手段に表示させる際に、位置合わせ確度判定部36が、位置合わせ確度が所定の基準を満たさない程度に低いと判定した場合に、手動位置合わせ受付部35が、位置合わせ処理の結果の修正を促すための報知を行う。
(もっと読む)
プロジェクターシステムを較正する方法、プログラム、コンピューターシステムおよびプロジェクターシステム
【課題】任意の組み込み関数を有するプロジェクターおよびポーズを自動的に再較正し、
さらに任意の望まれる視点に対し表示することのできる方法を提供すること。
【解決手段】観察カメラとプロジェクターを用いて立体のペアを形成し、構造化された光
を用いて表示面のピクセルレベルでの微細な再構成を行なう。幾何学形状的な歪みは直接
的なテクスチャーのマッピング問題として実施される。その結果、プロジェクターの動き
の再較正は単に新しい投影行列を演算してカメラ行列として設定することにより実施され
る。新視点を再較正するために、テクスチャーのマッピングは新しいカメラ行列に従い修
正される。
(もっと読む)
顔向き検知装置
【課題】サングラスを着用したひとの顔の中心位置の検出精度を向上させる。
【解決手段】顔向き検知装置10は、ひとの顔を撮像する乗員カメラ12から出力された顔画像から、撮像用光源14から照射された光の反射点を抽出する反射点抽出部21と、反射点の面積が最大となる1対の反射点を選択する反射点選択部22と、1対の反射点間の中心座標を算出する中心座標算出部23と、サングラス着用判定部27から出力された判定結果においてひとがサングラスを着用していると判定された場合に、中心座標算出部23から出力された中心座標に基づき、ひとの顔中心位置を検出する位置検出部28と、ひとの顔中心位置に基づき、ひとの顔向き方向を検知する顔向き検知部29とを備える。
(もっと読む)
超音波診断装置、医用画像処理装置及び医用画像処理プログラム
【課題】3次元画像と複数の2次元画像との対応を頭の中で逐一考えることなくかつ簡便に、ボリュームデータ内に3D−ROIを決定することができる超音波診断装置、医用画像処理装置および医用画像処理プログラムを提供すること。
【解決手段】特定部41は、2次元関心領域設定部39で設定された2D−ROI内の画素それぞれを通りVR画像を取得するときに用いたレイ上のセルを特定する。計算部43は、特定された各セルの輝度値と不透明度とに基づいて、2D−ROI内の各画素の値に寄与する寄与度をセルごとに計算し、投影画像から視線方向に沿って等距離にある複数のセルの寄与度から平均値を計算する。3次元関心領域決定部45は、所定の閾値を初めて越える平均寄与値に対応するVR画像からの距離を特定し、ボリュームデータ内における3D−ROIの位置を決定する。
(もっと読む)
医用画像の表示装置及び表示方法
【課題】前方画像を表示中に死角領域が生じた場合、死角領域の画像を含む後方画像を表示させることが可能な医用画像の表示装置及び表示方法を提供する。
【解決手段】管状構造物の内壁の画像を構成する各ボクセルを基に、管状構造物内に設けられた第1視点からの前方向の視野に含まれる前方画像を生成する前方画像生成部と、管状構造物の内壁の画像を構成する各ボクセルを基に、管状構造物内に設けられた第2視点からの後方向の視野に含まれる後方画像を生成する後方画像生成部と、表示部と、管状構造物内で移動させた第1視点の移動位置に応じて、第1視点からの前方画像を表示させていくときに、前方向の視野の死角となる死角領域が発生した場合に、死角領域の画像を含む後方画像を前方画像に代えて、又は、前方画像と共に表示部に表示させる表示制御部と、を有する。
(もっと読む)
画像処理装置
【課題】 ある平面に投影されたMIP画像またはMinIP画像にて指定した位置に対応する位置を、他の角度から投影した画像に正確かつ直接に示すことが可能な画像処理装置を提供する。
【解決手段】 画像処理装置100のCPU101は、一連の断層像3に基づいて生成されたMIP画像またはMinIP画像を含む複数の画像を一つの表示画面内に表示させ、表示されたMIP画像またはMinIP画像の任意の位置を操作者に指定させる。そして、CPU101は、指定されたMIP画像等の位置に対応する他の画像上の位置を特定し、マーカ78等により明示する。対応位置を特定するため、例えばCPU101は、MIP画像またはMinIP画像の奥行情報を予め求めておき、テーブルとして保持しておく。
(もっと読む)
医用画像処理装置、医用画像処理プログラム及び医用画像診断装置
【課題】一方向の視線方向からでは見えない領域を観察可能にすることで診断効率及び診断精度を向上させる。
【解決手段】正方向VE画像生成部15は、X線CT装置20により収集された3次元画像データに対して透視投影法による3次元処理を施すことで、ある視線方向から管腔臓器内を投影した正方向VE画像を生成する。また、逆方向VE画像生成部17は、3次元画像データに対して透視投影法による3次元処理を施すことで、正方向VE画像の視線方向とは逆の視線方向から大腸内腔を投影した逆方向VE画像を生成する。そして、正逆VE画像合成表示部18は、正方向VE画像と逆方向VE画像とをそれぞれ表示部11に表示させる。
(もっと読む)
画像処理装置、医用画像診断装置および画像処理プログラム
【課題】空間分解能の低い3次元医用画像から繊維性被膜の厚さを判定するための指標を提示すること。
【解決手段】血管内腔領域抽出部14、脂質コア領域抽出部15および冠動脈抽出部16は、3次元X線CT画像から冠動脈の血管内腔領域および脂質コア領域を抽出する。断面画像生成部17は、3次元X線CT画像から断面画像を生成する。血管内腔閉曲線抽出部18および脂質コア閉曲線抽出部19は、断面画像の血管内腔閉曲線および脂質コア閉曲線を抽出する。最短距離算出部110は、血管内腔閉曲線上の各点と脂質コア閉曲線の各点との最短距離を算出し、被膜領域抽出部111は、最短距離が閾値より小さい近接範囲を抽出する。占有率算出部112は、近接範囲の血管内腔領域に対する占有率を算出し、表示制御部115は、グラフ生成部113が生成した占有率グラフを表示部12のモニタにて表示させる。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および表示装置
【課題】入力される画像信号に基づいてグラデーション領域を判定して選択的に画像信号を平滑化し、入力される画像信号よりも階調数の多い画像信号に変換することが可能な画像処理装置、画像処理方法、プログラム、および表示装置を提供する。
【解決手段】Nビット(Nは正の整数)の入力画像信号から所定の周波数帯域の信号を画素ごとに検出する周波数成分検出部と、周波数成分検出部が検出した各画素に対応する検出信号をそれぞれ空間的に平滑化する検出値平滑部と、平滑化した検出信号に基づいてグラデーション領域を規定する制御信号を画素ごとに生成する制御信号生成部と、制御信号に基づいて入力画像信号の階調数が所定数拡張されたN+kビット(kは正の整数)の第1出力画像信号または入力画像信号が時間的に平滑化されて階調数が所定数拡張されたN+kビットの第2出力画像信号を画素ごとに出力する階調数拡張部とを備える画像処理装置が提供される。
(もっと読む)
画像処理装置、その画像処理方法及びプログラム
【課題】
画像上に類似した線分が存在する場合や画像上に線分が密集している場合であっても、画像間の線分を正確に対応付けられるようにした技術を提供する。
【解決手段】
画像処理装置は、対象物体を異なる位置及び方向から撮影した画像を入力する入力手段と、前記入力手段により入力された複数の画像各々から前記対象物体を示す線分を検出する検出手段と、前記検出手段により検出された線分各々を識別するのに用いる特徴ベクトルを求める特徴導出手段と、前記特徴導出手段により求められた特徴ベクトルに基づいて前記複数の画像間における線分各々の対応付けを決定する決定手段とを具備し、前記特徴導出手段は、前記検出手段により検出された線分を通過し且つ該線分に平行でない方向に沿って参照ラインを設定し、当該参照ライン上において輝度が変化した画素の輝度情報をその順序に従って並べた情報を要素として含む特徴ベクトルを求める。
(もっと読む)
情報処理装置、情報処理方法、及びプログラム
【課題】画質の低下を抑制しながら、画像のボケを補正する。
【解決手段】H_init生成部21は、入力画像に生じているボケの程度を表す点広がり関数H0を生成する。U_init生成部34は、オリジナル画像を分割した複数のオリジナルブロックの周囲をそれぞれ拡張した拡張ブロック内の画像のストラクチャ成分のボケを点広がり関数H0に基づいてそれぞれ補正した複数のストラクチャU0を生成する。conv部27乃至corr部31、U生成部35、及びトータルバリエーションフィルタ37等は、点広がり関数Hkを用いて、残差Ekが小さくなるように、ストラクチャUkを更新し、更新したストラクチャUkのストラクチャ成分を新たなストラクチャUk+1とする更新処理を1回以上実行する。本発明は、例えば、記録再生装置等に適用できる。
(もっと読む)
3次元フロー測定のための光学イメージング関数の組を求める方法
本発明は、検出光学系を用いて、異なる観測角で検出器面上に測定体積を投影できる多数の検出器面の各検出器面上への測定体積の投影形状を規定する光学イメージング関数の組を求める方法に関する。本発明による方法は、各体積位置(X,Y,Z)への画像点(x,y)の対応関係に加えて、測定体積内の点状の粒子の投影形状を形状パラメータ(a,b,φ,I)によって規定するとともに、検出器面毎に体積位置(X,Y,Z)をそれに対応する形状パラメータ値の組に対応付けるものと規定する。  (もっと読む)
(もっと読む)
顔特徴点検出装置および眠気検出装置
【課題】 実用化が容易であり、高い精度で表情を捉えることができる顔特徴点検出装置および眠気検出装置を提供する。
【解決手段】 眠気検出装置20は、まず、撮影装置10により運転者3の顔画像を撮影して、運転者3の顔上の特徴点を取得するときに用いる個人情報モデルにおける2D基準顔と2Dテンプレートを作成する(S1)。次に、覚醒状態における特徴点を取得し(S2)、眠気を検出するタイミングで特徴点を検出して眠気レベルを推定する(S3)。眠気レベルに応じて、居眠り防止のための装置を動作させる信号を出力する(S4)。特徴点の取得は、撮影装置10により運転者3の顔画像を撮影し、その画像を2D基準顔および2Dテンプレートを変形してフィッティングし、撮影画像から特徴点の2次元座標を取得する。次に、共通モデルである3D基準顔とフィッティングして3次元座標を求める。
(もっと読む)
移動軌跡図作成装置およびコンピュータプログラム
【課題】 ハイエンドなハードウェアを採用せずとも、人為的条件に左右されにくい、これまでよりも客観的なデータ取得を実現可能な飛翔体軌跡算出の技術を提供する。
【解決手段】 前記複数箇所のそれぞれの撮影手段にて飛翔体を撮影した画像データおよびその画像データを取得した時刻データを記録する画像データ記録手段と、それぞれの画像データおよび時刻データを入力するデータ入力手段と、その時刻データを用いて画像データを同期させるデータ同期手段と、そのデータ同期手段にて同期された画像データから飛翔体が三次元空間を移動する軌跡を含む解析データを算出する3D算出手段と、その3D算出手段が算出した解析データを出力する解析データ出力手段と、を備えた飛翔体軌跡算出装置を提供する。
(もっと読む)
距離画像入力装置と車外監視装置
【課題】画角が等しく、それぞれ異なる距離に焦点があった複数のステレオ画像ペアを取得して距離精度と位置精度が高い距離画像を検出する。
【解決手段】撮像装置2で被写体を撮像して、それぞれ異なる距離に焦点があった複数のステレオ画像を出力する。演算処理ユニット3の視差検出部13は撮像装置2から出力する各ステレオ画像の焦点が合う距離の範囲に基づいて視差を計算して視差情報を有する複数の視差画像を出力し、この複数の視差画像を視差合成部14で合成して合成視差画像を出力する。距離算出部15は視差合成部14から出力する合成視差画像から被写体までの距離を算出して距離画像を出力する。
(もっと読む)
201 - 220 / 978
[ Back to top ]