
Fターム[5B057CD14]の内容
Fターム[5B057CD14]に分類される特許
121 - 140 / 978
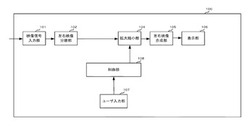
立体映像表示装置および立体映像表示方法
【課題】立体映像の観察のための集中を楽にし、重畳画像の確認をしやすくする。
【解決手段】信号入力部101は立体映像信号を含む信号を取得する。左右映像分離部102は、信号入力部101が取得した立体映像信号を左目用映像信号と右目用映像信号に分離する。拡大縮小部104は拡大縮小のそれぞれの中心を基準点として左目用映像信号と右目用映像信号を変更する。左右映像合成部105は拡大縮小部104が拡大または縮小した左目用映像信号と右目用映像信号を合成する。表示部106は左右映像号合成部105が合成した立体映像信号を表示する。
(もっと読む)
通行車両監視システム及び車両用監視カメラ

【課題】道路上の通行車両を正確に認識し、設置が容易で、かつ車両毎の走行状態の分析を負荷が集中することなく行うことができる通行車両監視システム及び車両用監視カメラを提供する。
【解決手段】通行車両監視システム1は、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラ2と、その複数の監視カメラに接続されたセンタ装置4とからなる。 各監視カメラ2は、複数の撮像部21と、複数の画像から距離画像のデータを生成する立体計測部23と、距離画像に基づく基本監視部24と、メモリ27と、距離画像に基づいて認識された車両の識別情報を生成して、その識別情報と、その認識された車両についての時刻情報とを含む情報を前記記憶部に記録する計測及び記録処理部と、距離画像に基づいて、基本監視部とは別の監視処理を実行する追加監視部25を有する。
(もっと読む)
撮像装置、画像処理装置およびコンピュータプログラムプロダクト
【課題】 流し撮り撮影における、ユーザの負担ならびに画像処理の負担を軽減すること。
【解決手段】 撮像装置は、撮像部10と、撮像部10で撮影された、少なくとも2枚の画像を用いて合成画像を生成する合成部50と、合成部50で合成された合成画像の像間のずれを検出するずれ検出部60と、ずれ検出部60で検出された、像間のずれを補正するずれ補正部70と、ずれ検出部70で検出されたずれに基づいて、像間のずれが補正された、ずれ補正後の合成画像の全部または一部にブレを発生させるブレ生成部80と、を含む。
(もっと読む)
立体画像編集装置および立体画像編集方法
【課題】出力後に編集時と異なるサイズとなる立体画像の編集時には、画像製作者が飛び出し量または引き込み量を適切な値に設定できない場合がある。
【解決手段】プリントされる立体画像のサイズに基づいて、プリントされる立体画像のサイズで表現可能な飛び出し量の範囲を表示し、表示される立体画像のサイズに基づいて、表示される立体画像のサイズで表現可能な飛び出し量の範囲を表示したため、プリントされる立体画像で表現可能な飛び出し量の範囲を表示部で確認しながら立体画像を編集することができる。
(もっと読む)
擬似濃淡画像生成装置及びプログラム
【課題】安定して視認性のよい画像を得ることができるようにする。
【解決手段】第1撮影装置12によって、自車両前方を撮影し、可視光画像を出力し、第2撮影装置によって、近赤外画像を出力する。画像取得部22によって、第1撮影装置12及び第2撮影装置14から可視光画像及び近赤外画像を取得する。擬似濃淡画像生成部24によって、可視光画像及び近赤外画像から、各画素について、該画素の明るい方の画像の輝度情報を用いて、擬似濃淡画像を生成する。
(もっと読む)
撮像装置
【課題】画像を撮影した後で撮影画像を拡大する際、ユーザにとって違和感のない拡大画像をすぐに表示することができる撮像装置を提供する。
【解決手段】被写体を撮像することによって2つの画像データを生成する撮像部と、前記2つの画像データを組み合わせて生成される3次元画像を表示可能な表示部と、前記表示部が表示する画像の拡大を指示する拡大指示信号の入力を受け付ける入力部と、前記表示部が前記撮像部が撮影した撮影画像を表示している状態で前記入力部によって前記拡大指示信号が入力された場合、前記2つの画像データで対応する拡大部の視差を減少させた後で拡大操作を行うことによって拡大画像データを生成し、この生成した拡大画像データに対応する3次元拡大画像を前記表示部に表示させる制御部と、を備える。
(もっと読む)
障害物認識装置及び障害物認識方法
【課題】高い精度で障害物を認識することができる障害物認識装置を提供する。
【解決手段】本発明の一実施形態に係る障害物認識装置1は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段11と、第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段12と、第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段22と、合成推定反射出力と第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段24と、を備える。
(もっと読む)
三次元地図作成装置およびその窓領域検出装置
【課題】写り込みや日照条件により窓領域の画像が均一にならない場合でも窓領域を高い精度で検出できる窓領域検出装置およびその検出結果を電波伝搬推定におけるシミュレーションに利用する三次元地図作成装置を提供する。
【解決手段】第1窓領域候補検出部47は、ビルの低中層階では窓領域に隣接ビルなどの写り込みが生じることから撮影角度によって見え方が異なることに着目し、撮影角度の異なる3つの全方位画像IC,IR,ILを、それぞれの注目ビルの画像が重なるように位置合わせして各画素の対応関係を求め、対応する画像領域同士を比較して画素値の差異が大きい矩形領域を第1窓領域候補Rw1として検出する。
(もっと読む)
画像処理装置及び画像処理システム
【課題】画像領域境界付近での距離誤差を低下させ、立体画像における遠近視認上の違和感を軽減させる画像処理技術を提供する。
【解決手段】立体画像を生成しようとする被写体の2次元画像上でエッジを抽出し、エッジで囲まれた各領域の相互境界QM付近で距離画像の補正を行う。このような領域境界では、遠近競合によって一方の領域CAの距離情報に他方の領域RAの距離情報が混入していることから、領域境界QMに近づくにつれて他方領域の距離情報の値へと変化しようとする傾向になり、それが誤差の原因となる。そのような誤った変化を抑圧すべく、領域境界QMの近くの画素であって、距離情報の変化が大きな画素については、距離情報の変化を抑制するような補正を行う。
(もっと読む)
車線推定装置
【課題】二重白線等、走行車線の内外に、走行車線と誤認し易い車線候補点が断続的にプロットされた場合であっても、走行車線を連続して推定することができて、安定した運転支援を行うことができるようにする。
【解決手段】前回求めた走行車線の内側エッジを推定する仮想線に基づいて今回の予測標準線LpL,LpRを求め(S12)、この予測標準線LpL,LpRと車線境界をプロットする第1候補点P1の点列との一致度を求め(S13)、第1候補点P1が最も一致度が高いと判定した場合、この第1候補点P1の点列を今回の主候補点Pmの点列として設定する(S18)。そして、この主候補点Pmの点列に基づき曲線近似式(y=ax2+bx+c)から、今回の走行車線の内側エッジを推定する仮想線Lsを求める。
(もっと読む)
画像処理装置および方法
【課題】画像の利便性の低減を抑制しながら、画像を符号化して得られる符号化データの保存に必要な容量を低減させることができるようにする。
【解決手段】バーチャル顕微鏡101は、1つの検体に対して複数の撮像画像からなるZスタック画像を生成する。3D-DCT符号化装置102は、Zスタック画像に対して3次元の離散コサイン変換を伴う符号化を行い、3D-DCT符号化データを生成し、ストレージ103に記憶させる。トランスコード装置104は、要求された画像を含む3D-DCT符号化データをストレージ103から取得し、必要な情報をJPEG符号化データに変換し、供給する。クライアント端末装置105は、そのJPEG符号化データを復号し、復号画像を観察画像として表示する。本発明は、例えば、画像処理装置に適用することができる。
(もっと読む)
画像処理装置、画像処理装置の制御方法及びプログラム
【課題】眼部における選択された層に関連する画像データを生成する。
【解決手段】画像取得部11は、眼部の所定の部位に関する画像データを取得する。画像解析部12は、前記画像データに基づいて前記所定の部位の層構造を解析する。解析画像生成部14は、取得された画像データ及び前記所定の部位の層構造の解析結果に基づいて、前記所定の部位の層構造のうち少なくとも一つの層に関連する複数の解析画像データを生成する。
(もっと読む)
視覚センシング方法および視覚センシング装置
【課題】汎用性に優れた視覚センシング方法を提供する。
【解決手段】撮影画像とマッチングモデルとを比較してパターンマッチングを行うパターンマッチング行程と、パターンマッチング行程で用いた撮影画像のうちマッチングモデルとマッチングした部位に基づいて更新マッチングモデルを生成し、更新マッチングモデルに基づいてマッチングモデルを更新するマッチングモデル更新行程とを含む。さらに、撮影画像から探索対象領域を絞り込んで探索対象画像を生成する探索対象画像生成行程を含み、パターンマッチング行程では、撮影画像の代わりに探索対象画像を用いてパターンマッチングを行い、探索対象画像生成行程では、以前に行った複数回のパターンマッチング行程で求めたマッチング位置に基づいて探索対象領域を決定する。
(もっと読む)
超音波診断装置及び超音波画像表示方法
【課題】 2次元断層画像と2次元弾性画像が合成された2次元合成画像上にレンダリング領域を設定し、設定されたレンダリング領域についてボリュームレンダリングを行なう超音波診断装置及び超音波画像表示方法を提供する。
【解決手段】 超音波を送受信する振動子を有する超音波探触子102と、2次元断層画像と2次元弾性画像とが合成された2次元合成画像を表示する表示部120とを備える超音波診断装置であって、2次元合成画像にレンダリング領域を設定するレンダリング領域設定部130と、レンダリング領域に対応する3次元断層画像を構成する3次元断層画像構成部115と、レンダリング領域に対応する3次元弾性画像を構成する3次元弾性画像構成部118とを備え、表示部120は3次元断層画像と3次元弾性画像とが合成された3次元合成画像を表示する。
(もっと読む)
点群位置データ処理装置、点群位置データ処理方法、点群位置データ処理システム、および点群位置データ処理プログラム
【課題】異なる視点から得た三次元点群位置データを扱うための処理を効率化する技術を提供する。
【解決手段】測定対象物の三次元点群位置データを取得する点群位置データ取得部111、三次元点群位置データに基づいて非面領域を算出する非面領域算出部を備えた点群位置データ処理部113、第1の視点において点群位置データ取得部111が得た三次元点群位置データの内の前記非面領域に含まれる三次元点群位置データに基づき、第1の視点から見た測定対象物と第1の視点とは異なる第2の視点から見た測定対象物とにおいてオーバーラップさせる部分を算出するオーバーラップ部分算出部114を備え、2つの視点から得た三次元点群位置データ間の位置合わせに適した特徴部分を含むオーバーラップ部分を算出する。
(もっと読む)
ナンバープレート読み取り装置
【課題】撮像手段の設置位置の自由度が高く、かつ、設置に伴う作業負担を軽減できるナンバープレート読み取り装置を提供することを目的とする。
【解決手段】撮像部101は、車両Vの前面部Fを斜め前方から撮像するように設置される。そして、撮像部101が撮像した画像からナンバープレート領域を検出し、初めて検出したナンバープレート領域画像を基準画像とした平面射影変換を行い、より近くで撮像した幾何学的歪みのより大きなナンバープレート領域画像の歪みを補正する。更に、平面射影変換にスケーリング(拡大率)パラメータを導入して、平面射影変換によって解像度が失われることを抑制する。
(もっと読む)
校正装置、距離計測システム、校正方法および校正プログラム
【課題】 ステレオカメラの経時的な位置ずれを補正し校正できる装置や方法を提供する。
【解決手段】 この校正装置は、移動体に搭載され、カメラ位置に関するパラメータを校正する装置であり、2地点において一方のカメラで撮影した2つの基準画像と、他方のカメラで撮影した2つの対応画像と2つの基準画像とを用い、各地点につき基準画像と対応画像の中の共通する複数の特徴点の位置から算出された複数の視差データとの入力を受け付ける画像取得部300と、2つの基準画像の中の共通する複数の特徴点を探索する特徴点探索部310と、探索された各特徴点につき、2つの基準画像の各特徴点における視差データから、視差とその視差に対応する視差変化量とをそれぞれ算出する視差計算部320と、算出された複数の視差および視差変化量から、カメラ位置に関するパラメータの補正値を算出する補正値計算部330とを含む。
(もっと読む)
車線推定装置
【課題】撮像手段で撮像した画像から、左右の走行車線の位置を推定する。
【解決手段】固定データメモリ9dには走行車線21L,21R間の標準レーン幅W1、二重白線の内側誘導線22間の狭レーン幅W2のデータが記憶されている。車線候補点設定部9aは撮像手段1で撮像した画像に基づいて走行レーンの左右の車線検出点Pを検出し、この車線検出点Pを起点として対向する車線側の各レーン幅W1,W2の位置と両レーン幅W1,W2間の位置に車線候補点G1〜G3を設定する。曲線近似処理部9bは車線検出点Pと車線候補点G1〜G3とに基づき求めた曲線近似式から走行レーンの左右に仮想線Lsを設定する。車線位置設定部9cは左右の仮想線Lsに対する各車線候補点G1〜G3の分散を求め、最小の分散を示す仮想線Lsに対応する車線種により左右の少なくとも一方の仮想線Lsの車線種を推定し、この車線種を基準に走行車線位置を確定する。
(もっと読む)
眼科用画像処理装置及びその方法
【課題】 ユーザが血管や白斑などを観察し難いため、医療診断するには使い勝手が悪かった。
【解決手段】 本発明に係る眼科用画像処理装置は、被検眼のボリュームデータに基づく画像から少なくとも1つの層を設定する層設定部14と、層設定部14により設定された層のボリュームデータを投影した投影像を表示部に表示させる表示制御部17とを有する。
(もっと読む)
超音波データ処理装置
【課題】ユーザに対する負担とトレースラインに関する精度の両面において好適な装置を提供する。
【解決手段】手動トレースライン形成部224は、手動トレース断面内にユーザ操作に応じて手動トレースラインを形成する。補間トレースライン形成部226は、手動トレースラインを利用した補間処理により、各自動トレース断面内に補間トレースラインを形成する。トレースライン修正部228は、各自動トレース断面ごとに、その自動トレース断面内で検出される対象組織の輪郭に基づいて補間トレースラインを修正処理する。追加断面選択部220は、前記修正処理の有効性を示す特徴量に基づいて、複数の自動トレース断面の中から追加トレース断面を選択する。そして、手動トレースラインに加えて、追加トレース断面内の修正処理後の補間トレースラインを利用して、補間処理が再実行される。
(もっと読む)
121 - 140 / 978
[ Back to top ]