
Fターム[5B057CD14]の内容
Fターム[5B057CD14]に分類される特許
61 - 80 / 978
カメラキャリブレーション装置
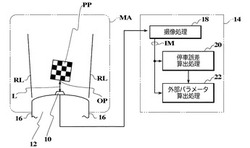
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム

【課題】ステレオ視に適した画像を選択出力する装置、方法を提供する。
【解決手段】異なる視点から撮影されたステレオ視に適用可能な第1左眼画像と第1右眼画像を入力し、第1左眼画像または前記第1右眼画像のいずれか1つの画像の画像変換処理によりステレオ視に適用可能な第2左眼画像と第2右眼画像を生成する。さらに、画素領域対応の距離情報を持つデプスマップに基づいて、被写体距離が相対的に遠いと判定した場合は、入力された第1左眼画像と第1右眼画像を出力画像として選択し、被写体距離が相対的に近いと判定した場合は、画像変換処理によって生成した第2左眼画像と第2右眼画像を出力画像として選択して出力する。この構成により、ステレオ視を行った場合に視差が大きすぎることによる疲労感や、オクリュージョンの発生に基づく違和感などが緩和され快適なステレオ視が実現される。
(もっと読む)
画像復元装置およびその方法
【課題】 撮像光学系の設計上の光学特性、および、撮像光学系の実際の光学特性を考慮した画像復元処理を実現する。
【解決手段】 画像復元装置は、撮像光学系の設計データより求まる光学特性に基づいて作成された画像復元フィルタを保持する。そして、設計データより求まる光学特性と実際の撮影に使用する撮像光学系の光学特性との差異情報から、設計データに基づく画像回復フィルタを再構成した補正フィルタを用いて画像復元処理を行う。
(もっと読む)
ステレオカメラ装置、ステレオカメラシステム、プログラム
【課題】2台のカメラで撮像した撮像画像の対応付けを容易にする。
【解決手段】2台のカメラ1、2は、光軸を平行にして配置される。カメラ1、2が撮像した撮像画像の画素の位置は、受光面に規定した2次元の直交座標である第1座標系で表される。また、実空間の点の位置は、カメラ1、2の光学中心を結ぶ第1方向と、カメラごとの光軸の方向である第2方向と、第1方向および第2方向に直交する第3方向との3軸の周りのそれぞれの角度によって表される。演算処理部10は、撮像画像を第1方向の軸周りの角度と第2方向の軸周りの角度とで位置が表される第1変換画像に変換する第1変換部101と、撮像画像を第1方向の軸周りの角度と第3方向の軸周りの角度とで位置が表される第2変換画像に変換する第2変換部102と、第1変換画像および第2変換画像を用いて視差を求める視差推定部103とを備える。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】精度良く三次元モデルを作成する。
【解決手段】画像受付部11は、被写体を異なる角度から複数回撮像することにより得られる複数の画像の組の入力を受け付ける。三次元モデル生成部12は、受け付けられた複数の画像の組のそれぞれに基づいて、被写体の三次元モデルを複数生成する。三次元モデル選択部13は、被合成三次元モデルと合成三次元モデルとを選択する。特徴点抽出部14は、被合成三次元モデルと合成三次元モデルから、複数の第1特徴点と第2特徴点を抽出する。特徴点選択部15は、抽出された複数の第1特徴点と第2特徴点の中から、ステレオカメラ1との距離が近い特徴点を優先的に選択する。座標変換パラメータ取得部16は、座標変換パラメータを取得する。座標変換部17は、合成三次元モデルの座標を被合成三次元モデルの座標系の座標に変換する。三次元モデル合成部18は、合成三次元モデルを被合成三次元モデルに合成する。
(もっと読む)
位置検知システム、それを用いた移動体、位置検知方法およびそのためのプログラム
【課題】センサの計測範囲に特徴的な被写体が存在していない場合や、そのセンサが他のセンサの計測範囲外にあるときにも、その位置姿勢の算出を可能にする。
【解決手段】第1のセンサは、環境内の存在物の位置情報および色情報を第1の検知情報として得るものであり、第2のセンサは、存在物の色情報を第2の検知情報として得るものであり、情報処理装置は、第2のセンサの位置姿勢を仮に設定する位置姿勢仮設定部と、位置姿勢仮設定部により仮に設定された第2のセンサの位置姿勢から存在物を検知したときに得られる検知情報を、仮想検知情報として、第1の検知情報を用いて仮想的に作成する仮想検知情報作成部と、仮想検知情報作成部で作成された仮想検知情報と第2のセンサで得られた第2の検知情報を比較する比較部と、比較部の比較結果と仮に設定された第2のセンサの位置姿勢から、第2のセンサの位置姿勢推定値を出力する位置姿勢推定部を備える。
(もっと読む)
超音波診断装置
【課題】対象組織の表面を比較的簡易な処理で且つ比較的明瞭に映し出す画像処理を実現する。
【解決手段】境界判定部50は、基準ベクトルVと各法線ベクトルNを比較し、基準ベクトルVと同じ側を向いていると判断される法線ベクトルNを特定し、その法線ベクトルNに対応したポリゴンを非表示境界と判定する。表示画像形成部60は、ボリュームデータ内における非表示境界のポリゴンを除いた複数のポリゴンに基づいて、対象組織の表面を映し出した表示画像を形成する。これにより(B)に示すように、胎盤側から胎児を観察した場合においても、胎児の顔に対応した表面T3が明瞭に映し出される。
(もっと読む)
環境認識装置および環境認識方法
【課題】処理負荷を軽減すると共にメモリの記憶領域を低減することで、対象物の特定効率の向上を図る。
【解決手段】環境認識装置130は、特定物の形状に関する情報である形状情報を予め保持しておき、検出領域内を分割した複数の対象部位の輝度を取得して、エッジを有する対象部位を抽出し、エッジを有する対象部位の相対距離を取得し、相対距離に応じた形状情報に基づいてエッジを有する対象部位にハフ変換を施し、形状情報で示される特定物を決定する。
(もっと読む)
超音波診断装置及び画像処理装置
【課題】画像の視認性を向上させることができる超音波診断装置及び画像処理装置を提供すること。
【解決手段】実施の形態の超音波診断装置では、分離部は、画像データに含まれる特徴量に応じて、当該画像データに基づいて描出される表示対象物の任意の領域を奥行き方向に分離する。画像生成制御部は、分離部によって分離された表示対象物の任意の領域に奥行き方向の情報が反映された表示用の画像を生成する。表示制御部は、画像生成制御部によって生成された表示用の画像を立体視可能なモニタにて表示させる。
(もっと読む)
画像補正方法、および立体画像撮影装置
【課題】被写体距離に応じて、取得した左右2枚の画像間での上下ズレを低減することを可能とする画像補正方法、および立体画像撮影装置を提供する。
【解決手段】Δθによる補正が行われた左目用画像aおよび右目用画像aの両方を、任意の角度Δφ回転させ、被写体aの2個の特徴点の、左目用画像aと右目用画像aとの間での上下方向における差分ΔYを算出する。左目用画像bおよび右目用画像bの両方を、ΔθおよびΔYを相殺するように、かつΔφ回転させて補正し、被写体bの特徴点の、左目用画像bと右目用画像bとの間での上下方向におけるズレΔY´を算出する。以上の操作を、複数のΔφについて行い、ΔY´が最小となるΔφおよびΔYを求める。
(もっと読む)
環境認識装置および環境認識方法
【課題】対象物の特定精度を向上する。
【解決手段】
環境認識装置130は、検出領域内に存在する対象部位の輝度を取得し、データ保持部152に保持された色識別子と輝度範囲との対応付けに基づき、対象部位の輝度に応じて対象部位に色識別子を設定し(S300)、データ保持部に保持された色識別子と輝度範囲との対応付けに基づき、水平距離の差分および高さの差分が所定範囲内にある、同一の特定物に対応する1または複数の色識別子が設定された対象部位をグループ化する(S304)。
(もっと読む)
環境認識装置および環境認識方法
【課題】雨天時等、光が拡散し易い環境において、対象物の特定精度を向上し、誤認識を回避する。
【解決手段】
環境認識装置130は、検出領域内に存在する対象部位の輝度を取得し、データ保持部152に保持された色識別子と輝度範囲との対応付けに基づき、対象部位の輝度に応じて対象部位に色識別子を設定し(S300)、データ保持部に保持された特定物と色識別子との対応付けに基づき、水平距離の差分および高さの差分が所定範囲内にある、同一の特定物に対応する1または複数の色識別子が設定された対象部位をグループ化して対象物とし(S302)、対象物のうち、光が拡散する環境か否かに応じて選択した色識別子が設定された対象部位で特定される外縁を、対象物の外縁とする(S304)。
(もっと読む)
環境認識装置および環境認識方法
【課題】対象物の特定精度を向上し、誤認識を回避する。
【解決手段】
環境認識装置130は、対象部位の輝度から、対象部位に対応する特定物を仮決定し(S302)、同一の特定物に対応すると仮決定された隣接する対象部位をグループ化して対象物とし(S304)、対象物からの水平距離の差分および高さの差分が第1所定範囲内にある、対象物と輝度に関して同一の特定物に対応する対象部位を対象物とし(S308)、対象物内の特定領域における全ての対象部位に対する、輝度が所定の輝度範囲に含まれる対象部位の割合が所定閾値以上であれば、その対象物を特定物として決定する(S310)。
(もっと読む)
単画像からのステレオペア検索装置及びステレオペア検索方法
【課題】複数の単画像にオーバーラップ領域がある場合、その複数の画像の組合せの中から、ステレオ画像と同等の効果を持つステレオペアを検索する。
【解決手段】画像検索場所の地理座標情報と人工衛星により撮影された衛星画像を格納する衛星画像撮影データベースに格納された衛星画像のポリゴン情報とに基づいて、前記画像検索場所とオーバーラップする領域を有する衛星画像を検索する衛星画像検索部と、検索された衛星画像が複数存在する場合に、複数の前記衛星画像のそれぞれの組み合わせについて、各衛星画像を撮影した際の人工衛星の位置座標と衛星画像の中心座標とを3次元で特定する衛星位置特定部と、前記複数の衛星画像のうちの任意の対となる第1の衛星画像と第2の衛星画像とに対応する前記人工衛星位置座標と前記中心座標と、に基づいて、ステレオペア条件を満たす衛星画像の対を抽出するステレオペア画像抽出部と、を有するステレオペア検索装置。
(もっと読む)
車両周辺監視装置
【課題】車両周辺監視装置において、実寸と相関性の高いテンプレートサイズを設定することができ、その結果、良好な画像処理結果を得ることができ、また、不必要に大きいテンプレートサイズを設定することがないため、計算量の増加を防ぐことにある。
【解決手段】制御手段(4)は、各実空間座標位置に予め設定された3次元寸法の仮想ブロックを想定し、この仮想ブロックが画像上に表示されるサイズを記憶する記憶手段(6)と、この記憶手段(6)に記憶された表示サイズから一つの画素の周辺画素を一群のデータとして画像処理を行うためのテンプレートサイズを設定するテンプレートサイズ設定手段(7)と、このテンプレートサイズ設定手段(7)により設定されたテンプレートサイズを用いて撮像手段(3)により撮像された画像を処理する画像処理手段(8)とを備える。
(もっと読む)
シーンにおけるオブジェクトを分類する方法
【課題】オブジェクト分類は、3D距離データ用の正確な分類方法が必要であり、オブジェクトを分類する方法を提供する。
【解決手段】移動するオブジェクトが、1組の1つ又は複数の1次元レーザーラインスキャナーを備えたスキャナーによって取得された距離データの最大マージン分類及び識別確率的逐次モデリングに基づいて分類される。2次元画像の形態での距離データは、前処理され、その後分類される。分類器は、外観分類器と、種々の推論技法を用いる系列分類器と、オブジェクトの構造の状態機械実施とから構成される。
(もっと読む)
車両用画像処理装置
【課題】画像のダイナミックレンジが大きく、白線等の道路設置物や灯火を確実に検出可能な車両用画像処理装置を提供すること。
【解決手段】第1の撮像手段3と、第2の撮像手段5と、前記第1の撮像手段3及び前記第2の撮像手段5の露出制御を、道路設置物・灯火認識用露出制御と、立体物認識用露出制御との間で切り替える切り替え手段7と、前記第1の撮像手段3及び前記第2の撮像手段5により撮像された画像から前記道路設置物、灯火又は前記立体物を検出する検出手段7と、を備え、前記道路設置物・灯火認識用露出制御において、前記第1の撮像手段3の露出と、前記第2の撮像手段5の露出とが異なることを特徴とする車両用画像処理装置1。
(もっと読む)
姿勢認識装置、姿勢認識方法、プログラム及び記録媒体
【課題】載置面上に自由に置かれた物体を高速に認識する。
【解決手段】安定姿勢計算部6は、3次元モデル情報記憶部5から3次元モデルの情報を読み出して、物体が載置面上で静止すると予測される物体の姿勢に対応する3次元モデルの安定姿勢を計算する。2次元投影画像生成部7は、安定姿勢計算部6で計算された安定姿勢の3次元モデルを観測して得られる2次元投影画像を生成する。2次元投影画像記憶部8は、2次元投影画像生成部7により生成された2次元投影画像を記憶する。載置面上に載置された物体の姿勢を認識する際には、画像照合部9は、撮像部101により撮像されて得られた撮像画像と、2次元投影画像記憶部8に記憶された2次元投影画像との一致度を計算する画像照合を行う。姿勢認識部10は、一致度が最も高い2次元投影画像に対応する3次元モデルの姿勢を、物体の姿勢として認識する。
(もっと読む)
医用画像処理装置
【課題】3次元表示における立体深度を適切に調整することができる医用画像処理装置を提供する。
【解決手段】実施形態の医用画像処理装置は、医用画像の数値データを取得するデータ取得部と、3次元医用画像を作成するための視差画像の第1の輻輳角を設定する輻輳角設定部と、前記データ取得部で取得した数値データと、前記輻輳角設定部で設定された前記第1の輻輳角とに基づき、3次元医用画像を作成する3次元画像作成部と、前記3次元画像作成部で作成した3次元医用画像を表示する3次元表示部と、あらかじめ設定された条件を満たすか否かを判定する条件判定部と、を有し、前記条件判定部で条件を満たすと判定した場合、前記輻輳角設定部は、前記条件に対応する立体深度に基づいた、第1の輻輳角と異なる輻輳角を設定し、前記3次元画像作成部は、前記条件に対応する立体深度に基づいた当該輻輳角に基づく3次元医用画像を作成するよう構成される、ことを特徴とする。
(もっと読む)
情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法
【課題】簡単な操作で種々の画像を表示することが可能な情報処理技術を提供する。
【解決手段】ゲーム装置は、実空間に配置されたマーカを撮像する。ゲーム装置は、撮像した画像に含まれるマーカに基づいて、ゲーム装置を基準としたマーカの位置および姿勢を算出するとともに、マーカ上にマーカ座標系を設定する。また、ゲーム装置は、ゲーム装置が備える加速度センサが検出した加速度に基づいて、重力方向を検出する。次に、ゲーム装置は、検出した重力方向に基づいて、マーカ座標系の重力方向を算出し、算出したマーカ座標系の重力方向に基づいて、仮想キャラクタの姿勢を決定する。そして、ゲーム装置は、当該仮想キャラクタを表示装置に表示する。
(もっと読む)
61 - 80 / 978
[ Back to top ]