
Fターム[5B057CD14]の内容
Fターム[5B057CD14]に分類される特許
41 - 60 / 978
デュアルデジタルカメラセンサを備えたモバイルデバイス及び使用方法
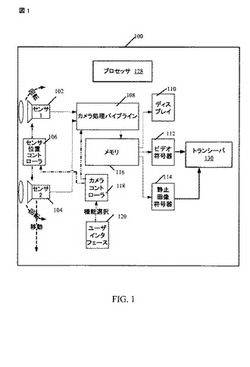
【課題】2つのセンサから取得された画像を合成して高度なアプリケーションをサポートする。
【解決手段】モバイルデバイス100は、第1のセンサ102と、第2のセンサ104と、センサ位置コントローラ106と、カメラ処理パイプライン108とを含む。パイプラインは、例えばモザイク除去、レンズロールオフ補正、拡大縮小、色補正、色変換、及び空間フィルタリングのような技術を実行する。センサ位置コントローラは、センサ102、104を回転、シフト、又はスライドして、2つのセンサの場所及び/又は位置を調整する。センサ102、104は、画像品質の改善、3−D画像及びビデオの視覚化、及び360度パノラマビデオの生成のような機能をもつ。
(もっと読む)
カメラ状態測定装置およびカメラ状態測定方法

【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
画像処理装置、および画像処理方法、情報記録媒体、並びにプログラム
【課題】画像の各構成画素の像高等に応じた最適なぼけ補正処理を実行する装置、方法を提供する。
【解決手段】画像のぼけ補正処理を実行する画像信号補正部を有し、画像信号補正部は、基本フィルタと、ぼけ補正対象画素の像高に応じて生成する座標位置対応ハイパスフィルタを、ぼけ補正対象画素の像高に応じたブレンド係数を適用してブレンドし、ブレンド処理によって生成したフィルタを適用してぼけ補正を実行する。例えば、ぼけ補正対象画素の画素位置が、画像中心から遠く像高が大きくなるに従って、座標位置対応ハイパスフィルタのブレンド率を減少させたブレンドを実行する。あるいは、さらに、像高に応じた強度調整を行った強度調整ぼけ補正フィルタを生成してぼけ補正を行う。
(もっと読む)
立体感提示装置および方法ならびにぼけ画像生成処理装置,方法およびプログラム
【課題】片眼でも立体感を得ることができる立体感提示装置を提供する。
【解決手段】間隔をおいて配置された2台のカメラから出力されるステレオ画像データを構成する左右の画像データに基づいて距離画像データを生成する距離画像生成手段53と,生成された距離画像データを用いて,上記の左または右の画像データに,距離に応じた焦点ぼけを与えてぼけ画像データを生成するぼけ画像生成手段55を備える。生成されたぼけ画像データに基づいて対象の焦点ぼけ画像を表示装置に表示する。
(もっと読む)
車載用環境認識装置
【課題】より少ない処理負荷で周囲車両のヘッドライト光に起因した誤認識を防ぐことができる車載用環境認識装置を得ること。
【解決手段】車載用環境認識装置100は、画像から光源を抽出する光源抽出部300と、源の画像上の位置に基づいて光源が環境認識の際に誤検知要因となるライトを抽出し、ライトのライト強度と3次元位置と配光パターンの情報を含むライト情報を推定するライト情報部400と、ライト情報に基づいてライトが路面で反射する画像上の路面反射推定画像領域を推定する路面反射推定部500と、路面反射推定画像領域に基づいて自車両の周囲環境を認識する車載用環境認識部600と、を有する。
(もっと読む)
画像処理装置、および、画像処理装置の制御方法ならびに当該方法をコンピュータに実行させるためのプログラム
【課題】画像における遠近感を画像処理によって強調する画像処理装置を提供する。
【解決手段】画像処理装置は、画像取得部、奥行き取得部、奥行き変換部、および、奥行きデータ付加部を具備する。画像取得部は画像を取得する。奥行き取得部は、画像内の画素に対応付けられた奥行きを取得する。奥行き変換部は、奥行きの増加に応じて非線形に所定値へ接近する特性を持つ関数に従って奥行きを変換する。奥行き画像データ付加部は、変換された奥行きを前記画像に対応付けて記録する。
(もっと読む)
キャリブレーション装置及び歪み誤差算出方法
【課題】撮影画像内の周辺部において生じる歪み誤差を補正できる、キャリブレーション装置及びキャリブレーション方法を提供すること。
【解決手段】キャリブレーション装置100において、特徴点設定部110が、周期性を持って全体に配列された特徴点群が含まれたキャリブレーションボードがステレオカメラによって撮影されたボード画像内の画像内特徴点群の内から、設定ポイントが密に且つボード画像の中央部領域にのみ配置された第1パターン及び設定ポイントが疎に且つボード画像の全体に配置された第2パターンに基づいて、第1の画像内特徴点群セット及び第2の画像内特徴点群セットを設定する。誤差補正情報生成部130が、第1の画像内特徴点群セットに含まれた各画像内特徴点の座標と、第2の画像内特徴点群セットに含まれた各画像内特徴点の座標と、キャリブレーションパラメータとに基づいて、歪み誤差を算出する。
(もっと読む)
情報処理装置及び情報処理方法
【課題】計測装置と計測対象物体との間の位置または/及び姿勢の関係があいまい性を含んだ場合であっても、高精度に物体の位置姿勢を計測できるようにする。
【解決手段】撮像時刻におけるロボットのモーション情報から、撮像装置と対象物体の位置姿勢移動量に変換して計測データとして位置姿勢更新に用いる。ロボットのモーション差分という確度の高い情報を計測データとして加えることにより、精度および安定性を向上させるようにする。また、撮像時刻の異なる距離画像と濃淡画像の幾何的関係を、ロボットアームの軌跡情報を用いて求めることで、両者の情報を同時に利用して位置姿勢推定を行うようにすることにより、全体のデータを同時に用いることを可能にする。
(もっと読む)
3次元測定装置、3次元測定方法及びプログラム
【課題】測定対象物が明るさ(色)の異なる複数の領域を有している場合に、適切にその測定対象物を3次元測定することができる3次元測定装置等の技術を提供すること。
【解決手段】本技術の一形態に係る3次元測定装置は、投影部と、撮像部と、制御部とを具備する。前記投影部は、照度を変化可能な照明を有し、前記照明からの光により測定対象物に縞を投影する。前記制御部は、前記撮像部により前記測定対象物の画像を撮像させ、撮像された前記測定対象物の画像から輝度値を取得し、取得された前記輝度値に基づいて、前記測定対象物に対して複数の検査ブロックを割り当て、割り当てられた前記検査ブロック毎に、前記照明の測定照度を決定し、決定された前記測定照度で、それぞれ、前記投影部により前記検査ブロックに対して縞を投影し、前記縞が投影された前記検査ブロックの縞画像を前記撮像部により撮像し、撮像された前記縞画像に基づいて前記測定対象物を3次元測定する。
(もっと読む)
3次元形状の取得装置、処理方法およびプログラム
【課題】動きのある対象の形状を高密度かつ高フレームレートに計測可能な画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】画像処理装置10と、カメラ28、32と、プロジェクタ24と、プロジェクタ26とで、3次元空間中に存在する物体30の2次元画像を撮影し、撮影された2次元画像から物体の3次元形状を復元している。プロジェクタ24は物体30に対して横方向のパターンを照射し、プロジェクタ26は物体30に対して縦方向のパターンを照射している。そして、これらのパターンが物体30で反射したパターン光をカメラ28、32で撮影することで2次元画像を取得し、この2次元画像から画像処理装置10により3次元画像を復元している。さらに、カメラ28と32の整合性を調べることで3次元形状の精度向上が実現される。
(もっと読む)
画像処理装置および画像処理方法
【課題】多視点画像から鮮鋭な画像を合成する。
【解決手段】多視点で撮影された複数枚の入力画像を合成し新たな画像を生成するにあたって、各入力画像ごとに、合成によりフォーカスされる被写体の位置に応じて定まる仮想センサ上の投影領域に含まれる画素のそれぞれの画素に対して、合成のための使用率を設定する。合成画像の画素位置に重なった複数の入力画像の画素値に使用率を掛け合わせたをものを平均し合成画像の画素値とすることにより、鮮鋭な合成画像を得る。
(もっと読む)
画像処理方法および装置
【課題】高密度かつ高速に運動する物体の形状計測を可能にするための画像処理方法および装置を提供する。
【解決手段】投影装置により観測対象上に投影される、周期パターンからなる投影パターンを撮影装置により撮影し、投影パターンを含む入力画像から形状復元を行う画像処理方法において、投影装置より投影された投影パターンを撮影装置により撮影された入力画像から検出するステップと、検出された投影パターンの相対位相を検出するステップと、検出された投影パターンの絶対位相を、基準位置からの相対的な位相と、基準位置の絶対的な位相との和により表すと、複数の投影パターンの絶対位相により計算した奥行きが一致するという第1条件が検出された投影パターンの各画素について成立することに基づき基準位置の絶対的な位相を計算するステップとを備える。
(もっと読む)
車両用画像生成装置及び車両用画像生成方法
【課題】車両周囲画像に含まれる他車両の任意視点から見た画像を、より正確に生成する装置を提供する。
【解決手段】車両用画像生成装置を、3次元構造を有する車両周囲画像に含まれる他車両の可視画像部分の画像情報に基づき、他車両の死角部位の形状や色などの情報を推測する死角情報推測部25と、死角情報推測部25で推測された死角情報に基づき、可視画像部分データから死角部位を補完するための補完画像データを生成し、生成した補完画像データを用いて他車両の死角部位の画像を補完する画像補完部26と、仮想視点設定部27から入力される仮想視点情報に基づき、補完後の車両周囲画像を仮想視点情報の示す視点から見た画像に再構成する画像再構成部28と、を含む構成とした。
(もっと読む)
焦点に基づく動的シーンの深度再構成のための装置および方法
【課題】動的シーンが、レンズおよびセンサを備えるカメラを用いて、焦点深度を変更しながら動的シーンの焦点スタックを最初に取得することによって、深度および拡張被写界深度ビデオとして再構成される。
【解決手段】焦点スタックのフレーム間のオプティカルフローが求められ、そのオプティカルフローにしたがってフレームをワープして、フレームを位置合わせし、仮想静的焦点スタックを生成する。最終的に、デプス・フロム・デフォーカスを用いて、仮想静的焦点スタックごとの深度マップおよびテクスチャマップが生成され、そのテクスチャマップはEDOF画像に対応する。
(もっと読む)
画像処理装置および画像表示システム
【課題】標本の高さ方向が異なる画像において、高さ方向に垂直な平面間の撮像領域のずれを補正して、高精度の全焦点画像および3次元画像を構築することができる画像処理装置および画像表示システムを提供すること。
【解決手段】固定された軸に沿って移動しながら撮像された一群の画像をもとに全焦点画像および/または3次元画像の構築処理を行う画像処理部33であって、一群の画像において、各画像における軸に垂直な平面内のずれの検出を行なう検出部331と、検出部331の検出結果に応じてずれの補正を行う補正部332と、固定された軸に沿って移動して撮像された画像および/または補正部332で補正された画像を含む一群の画像をもとに、全焦点画像および/または3次元画像を構築する画像構築部333と、を備えた。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】カメラ、レーザの相対位置を高精度で設置する必要がなく、また、測定レンジを複数種類を単一の測定プログラムにより変更する。
【解決手段】レーザ線条光照射部12と、既知形状の基準模様群を表示面に表示した座標変換テーブル作成用印刷表示板16と、照射部位の光切断面及びレーザ照射平面上に設置される表示板16を撮影するカメラ11と、表示板16の基準模様群を撮影したカメラ上の座標データを抽出する基準座標抽出手段131とから基準模様群の座標データと基準座標抽出手段131で抽出されたカメラ上の座標データとの対応関係を示す座標変換テーブル133を作成する。形状測定時には、表示板16を外して同じ位置に被測定物を配置させ、レーザ線条光を照射して照射部位の光切断面を撮影した画像から、点群抽出手段134により光切断面の点群を抽出する。抽出した点群座標を近似処理手段135により座標変換テーブル上の値に近似する。
(もっと読む)
画像処理システム及び方法
【課題】医用画像を適切に表示することができる画像処理システム及び方法を提供すること。
【解決手段】実施形態に係る画像処理システムは、第1画像生成部と、第2画像生成部と、表示制御部とを備える。前記第1画像生成部は、3次元の医用画像データであるボリュームデータに対してレンダリング処理を行うことで、第1画像を生成する。前記第2画像生成部は、前記ボリュームデータに対してレンダリング処理を行うことで、前記第1画像と立体感の異なる第2画像を生成する。前記表示制御部は、表示部の表示面内で指定された指定領域及び該指定領域を除く背景領域のそれぞれに、前記第1画像及び前記第2画像のそれぞれを表示するように制御する。
(もっと読む)
画像処理方法、画像処理装置及びコンピュータプログラム
【課題】画像間の対応付けが困難な場合であっても、奥行き推定誤差を抑制し、高品質な仮想視点画像を合成すること。
【解決手段】複数の異なる視点から被写体を撮影した多視点画像に基づいて、任意の仮想視点位置から見た被写体の画像を合成する画像処理方法である。多視点画像に対して各画素の奥行きに対する尤度を算出し、尤度に基づいて個々の画素の奥行きを推定し、高精度推定画素の奥行き推定結果を用いて、画像特徴から奥行きに対する尤度を推定するための推定関数を算出し、補正対象画素に対して推定関数を用いて尤度の補正を行い、補正後の尤度を用いて画像全体の奥行きを再推定し、再推定した奥行きと、多視点画像とに基づいて、仮想視点位置に応じた被写体の画像を合成する。
(もっと読む)
画像の表示
【課題】合成開口レーダー画像の特徴に基づいて画像を表示する装置を提供する。
【解決手段】画像110を処理する方法及び装置である。第1画像132において識別された第1特徴136のクラスタ156が識別される。複数のクラスタのうちの各クラスタは、第1特徴136からの第1グループの特徴159を含む。複数のクラスタのうちの各クラスタを、第2画像134において識別された第2特徴138からの第2グループの特徴163を含む対応するクラスタ161とともに表示するための変換155は、第1画像の第1特徴と、第2画像の第2特徴との間の初期対応を使用して識別される。第1特徴のクラスタからのクラスタのセット162は、各クラスタに対して識別された変換を使用して識別される。第1画像を第2画像とともに表示するための最終変換172は、クラスタのセットを使用して識別される。
(もっと読む)
カメラキャリブレーション装置
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
41 - 60 / 978
[ Back to top ]