
Fターム[5B057DA07]の内容
Fターム[5B057DA07]に分類される特許
2,201 - 2,220 / 3,964
レーザめっき装置およびめっき部材
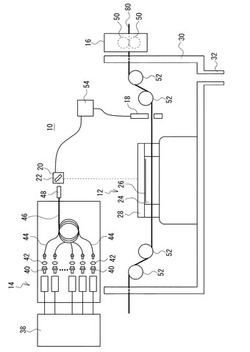
【課題】被めっき材上の微小領域を高位置精度で部分めっきすることが可能なレーザめっき装置およびこのレーザめっき装置によりめっきされためっき部材を提供すること。
【解決手段】被めっき材80にめっき液を接触させるめっき槽12と、めっき液中を通過する被めっき材80にレーザ照射して被めっき材80上にめっき金属を析出させるレーザ発振器14と、被めっき材80を搬送してめっき槽12中のめっき液に通過させる搬送機器16と、搬送される被めっき材80の位置決め孔の位置を検出するための光電センサ18と、レーザ光の光路上に配置されレーザ光を走査可能なガルバノミラー22を有し光電センサ18による位置決め孔の位置検出によりレーザ光を走査開始位置に走査復帰させるガルバノスキャナ20とを備えたレーザめっき装置10とする。また、レーザめっき装置10により微細にスポットめっきされためっき部材とする。
(もっと読む)
連動式カウンタ及び連動装置

【課題】
連動信号を相互に通信していない連動式カウンタが含まれていても、他の連動式カウンタが出力した連動信号に合わせて常時カウント数を調節することができる連動式カウンタを実現することを目的とする。
【解決手段】
第96図に示すように、連動式カウンタ401を、同期式カウンタ411、終り値判定用論理ゲート412及びイネーブル信号用論理ゲート416から構成されるカウンタ部分と、連動信号増幅用論理ゲート413、連動信号用ラッチ回路414及び連動信号用論理ゲート415から構成される連動部分と、から構成する。
(もっと読む)
画像処理装置、画像読取装置、画像処理プログラム及び記録媒体
【課題】本発明は、読取可能範囲を超える大きさの原稿の分割読取画像を自動結合する画像処理装置、画像読取装置、画像処理プログラム及び記録媒体に関する。
【解決手段】画像読取形成装置1は、原稿読取部20で、原稿面が最大スキャン可能範囲よりも大きい原稿を複数回に分割して読み取ると、該分割読取画像の連続性を画像データ加工部15で判断し、連続性が確認されると、画像データ加工部15で該分割読取画像をその連続性に応じた状態で結合する。したがって、1回で読み取ることのできない大きな原稿を分割して読み取っても、各分割読取画像の連続性を判断して自動結合することができる。
(もっと読む)
位置姿勢計測装置及びその制御方法
【課題】複雑な形状を有する計測対象物体の位置姿勢推定のために必要な手続きを簡便化することを可能にする。
【解決手段】計測対象物体を撮像する撮像装置と前記計測対象物体との間の相対的な位置姿勢を計測する位置姿勢計測装置は、計測対象物体の3次元モデルデータに基づいて計測対象物体の構成面を抽出するとともに、構成面を形成する線分から、撮像画像のエッジの検出に用いるべき計測用線分を抽出する。位置姿勢計測装置は、抽出された計測用線分を撮像装置の推定された位置姿勢に基づいて撮像画像に投影し、抽出された構成面によって隠蔽されない計測用線分を選択し、選択された計測用線分と撮像画像の対応するエッジとに基づいて撮像装置と計測対象物体との相対的な位置姿勢を算出する。
(もっと読む)
映像処理装置、映像処理方法、プログラム及び記録媒体、並びに映像処理システム
【課題】 例えば放送された映像の空間をより広げて認識することができる映像を合成することができる映像処理装置、映像処理方法、プログラム及び記録媒体、並びに映像処理システムを提供する。
【解決手段】 映像処理装置1は、テレビジョン画像信号が供給される画像取得部2と、画像取得部2により取得された入力画像の第1のフレーム画像と時間的に前のフレームである第2のフレーム画像とに基づいて当該第1のフレーム画像の動きを検出し、画枠からはみ出すはみ出し部分を推定するカメラ動き推定部3と、はみ出し部分を記憶する画像蓄積メモリ4と、第1のフレーム画像において画枠外となるはみ出し部分を第1のフレーム画像に合成して画像を創造する画像合成部5と、はみ出し部分が合成されて得られた合成画像を出力する画像出力部6と、これらを制御する制御部7とから構成されている。
(もっと読む)
順次的画像位置合わせ
指紋の読み取り方法が開示される。この方法は、指と画像センサとの間の相対的移動に応じて指から指紋の画像を獲得するステップ;前記獲得した画像から、前記指紋の新たな領域を表すラインを選択するステップ;選択された各ラインのための合成パラメータを決定するステップ;および、前記選択されたラインを含む合成画像が構成できるように、前記合成パラメータおよび前記選択されたラインを保存するステップ、を含む。対応する指紋読み取り装置、デバイス、およびコンピュータプログラムも開示される。 (もっと読む)
画像処理装置、画像処理プログラム及び方法
【課題】高速且つ高精度で複数画像の重ね合わせを行って高解像度の画像を得ることができる画像処理装置、画像処理プログラム及び方法を提供する。
【解決手段】第1の解像度を有する前記複数の画像それぞれについて2次元フーリエ変換を行なう変換手段102と、前記変換手段102により変換されて得られた周波数領域において、各画像の相対的回転角度を演算する回転量演算手段103と、前記変換手段102により変換されて得られた周波数領域において、前記回転角度演算手段103により演算された各画像の相対的回転角度を用いて各画像を回転させて、各画像の相対的位置変位量を演算する変位量演算手段103と、前記回転量演算手段103により得られた各画像の相対的回転角度、及び前記変位量演算手段103により得られた各画像の相対的位置変位量とを用いて前記複数の画像を重ね合わせて第2の解像度を有する画像を得る重ね合わせ手段105とを備える。
(もっと読む)
画像処理装置および画像処理方法
【課題】変形対象の領域が重複した場合の変形処理結果をより好ましいものとする技術を提供する。
【解決手段】
画像処理装置は、対象画像TIを解析して対象画像TI上に複数の変形領域TA1,TA2を設定する変形領域設定部と、変形領域TA1,TA2内の画像の変形を行う変形処理部と、を備えている。変形処理部は、複数の変形領域TA1,TA2が重複した場合に、複数の変形領域TA1,TA2の重複部分を含み、複数の変形領域TA1,TA2のそれぞれの一部の部分領域の変形量を低減する。
(もっと読む)
複数のカメラを用いた撮像方法および計測装置
【課題】複数のカメラを用いて複数の計測点を撮像する場合に、撮像に要する時間を短縮する。
【解決手段】計測対象である基板2の傾き角度θに基づいて、各カメラ9B,9Cに対応する各計測点2a−2,2a−3のずれ量を算出し、このずれ量とカメラ9B,9Cの視野サイズに基づいて、3台のカメラ9A,9B,9Cの内、カメラの視野内に各計測点2a−1,2a−2,2a−3が収まって同時に撮像可能なカメラを判定し、同時に撮像可能と判定されたカメラによって、各計測点を同時に撮像するようにしている。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】複数の観察対象が順次撮像された一連の観察画像における各観察画像に撮像された観察対象を迅速に判定できること。
【解決手段】複数の観察対象として食道、胃、小腸および大腸が順次撮像された一連の観察画像を処理する画像処理装置1において、一連の観察画像のうち少なくとも処理対象画像の圧縮画像データに基づく圧縮情報をもとに、その処理対象画像に撮像された臓器を食道もしくは胃と、小腸と、大腸とのいずれか一つと判定する臓器判定部4aを備え、臓器判定部4aは、一連の観察画像内で処理対象画像を順次切り換えるとともに、その処理対象画像に撮像された臓器を順次判定する。
(もっと読む)
画像処理方法、画像領域検出方法、画像処理プログラム、画像領域検出プログラム、画像処理装置、および、画像領域検出装置
【課題】コードが埋め込まれた矩形画像に対し見た目の変更を可能な限り少なくして、それが撮像して取り込まれたときの、その矩形の四隅の特定を容易行うことを可能とした画像処理方法を提供することである。
【解決手段】本発明の画像処理方法では、矩形画像中の四隅の画像内側に指定された領域内の画素について、処理対象とする画素の階調レベルと背景領域の画素の階調レベルとの差分が、処理対象とする画素の周辺では、最も大きくなるように(黄色の補色に対応する色成分)階調レベルを変更している。すなわち階調レベルを下げている。これは、階調レベルの変更処理を行った結果の画素が黄色っぽく見えることを意味する。黄色は人間の目には認識しづらいため、画素に対して行った変更が、矩形領域の外側にマークや枠を配置する場合に比べて目立ちにくくなる。
(もっと読む)
ピーク位置探索方法、ピーク位置探索装置、およびピーク位置探索プログラム
【課題】2つの標本化データの相互相関のピーク位置を求めるピーク位置探索方法およびピーク位置探索装置等に関し、2つの標本化データの相互相関のピーク位置を高精度に求める。
【解決手段】2つの標本化データをそれぞれ離散フーリエ変換し2つのスペクトルを得る。次に一方を複素共役スペクトルとして他方のスペクトルとの積の逆離散フーリエ変換を行って相互相関関数を求め、この相互相関関数のΔtごとの標本値から相互相関のピーク位置を求める。
(もっと読む)
画像処理装置
【課題】 複数の処理からなる一連の画像処理をより効率的に実行することが可能な画像処理装置を提供する。
【解決手段】 画像処理装置1によれば、処理毎に設定された優先度に応じて、単位周期毎に(カウンタCTの値に応じて)実行される処理の組み合わせが設定されるとともに、6つの単位周期からなる基本周期の一周期で一連の画像処理が行われる構成とされている。すなわち、カウンタCT=1のときには、顔向き判定,視線方向検出が行われ、カウンタCT=2のときには、視線方向検出,瞬き検出が行われ、カウンタCT=3のときには、顔向き判定,瞬き検出が行われる。また、カウンタCT=4のときには、視線方向検出,居眠り判定,意識低下レベル判断が行われ、カウンタCT=5のときには、顔向き判定,視線方向検出,瞬き検出が行われ、カウンタCT=6のときには、瞬き検出,居眠り判定,意識低下レベル判断が行われる。
(もっと読む)
駐車支援装置
【課題】駐車操作が完了したことを認識し、駐車が完了したときにその旨をドライバーに報知することができる「駐車支援装置」を提供すること。
【解決手段】車両及び車両周囲の画像を車両の直上からの視点で表す画像(俯瞰画像)で表示する駐車支援装置において、表示される画像データから駐車枠を検出し、自車両と駐車枠との角度を算出する(ステップS40)。そして、自車両の画像及び検出された駐車枠に基づいて自車両と駐車枠との相対位置を算出する(ステップS80)。自車両が前記駐車枠内に入り、かつ、自車両と前記駐車枠との角度が所定角度以内であるか判断し(ステップS70、S90)、かかる条件を満たしたときに駐車完了信号を出力する(ステップS100)。
(もっと読む)
行動識別装置および行動識別方法
【課題】移動体の行動を識別する識別精度を向上させるとともに、識別可能な移動体の行動を増やす。
【解決手段】移動体を観測して観測値と、移動体のIDと、観測時刻とを含む第1レコードを逐次記録し、移動体の行動の特徴を表す1つ以上の特徴量を抽出し、1つ以上の特徴量と行動を表すラベルとを含む第2レコードを記録した第2データベースに基づき、抽出された特徴量から移動体の行動が識別不能なとき、該特徴量と、該特徴量が抽出された観測時刻を代表する時刻と、移動体のIDとを含む第3レコードを第3データベースに記録し、識別可能と判定された特徴量と第2データベースとから移動体の行動を識別し、行動識別された移動体のIDと同一のIDをもちかつ前記移動体の観測時刻との差が第1閾値以内の時刻をもつ第3レコードを検出し該第3レコードに含まれる特徴量と行動識別された移動体の行動を表すラベルとを含む第2レコードを第2データベースに追加する。
(もっと読む)
画像補正装置、画像補正方法、肌診断方法およびプログラム
【課題】人物画像をより美しく見せるための画像補正の技術を提供する。
【解決手段】第1撮像条件で撮像された第1画像において予め定められた条件を満たす肌の部分領域を特定する部分領域特定部と、第1撮像条件と異なる第2撮像条件で撮像された第2画像において部分領域に対応する対応領域を特定する対応領域特定部と、第2画像の対応領域に予め定められた画像処理を施すことによって第2画像を補正する画像補正部と、を備える画像補正装置を提供する。
(もっと読む)
画像拡大装置および方法
【課題】鮮鋭な高解像度画像を得る。
【解決手段】画像データのうち1フレームを基準フレームに設定し、基準フレームの画素値に基づく内挿処理により、基準フレームに含まれる画素数よりも多い画素数の仮高解像度画像の画素値を算出する仮高解像度画素値算出部と、画像データに含まれる1以上のフレームの中の複数の画素を1つずつ注目画素として順次設定し、注目画素の基準フレームへの1以上の対応位置を小数精度で算出する対応位置算出部と、仮高解像度画素値と注目画素の画素値と対応位置とから、対応位置に対応する仮高解像度画素値の修正量を並列に算出する仮高解像度画素値修正量算出部と、仮高解像度画素値修正量を複数保存する修正量一時保存部と、一時保存された複数の修正量を加算する加算部と、加算された修正量を用いて仮高解像度画素値を修正する仮高解像度画素値修正部とを有する。
(もっと読む)
撮像装置および撮像方法
【課題】本発明によれば、異なる露出条件の少ない枚数の画像を合成することで、処理時間を短縮しつつ、被写体が動いている撮影シーンの多い連写時のカメラブレや被写体のブレを軽減した連写画像を得ることが可能な撮像装置および撮像方法を提供する。
【解決手段】撮像装置10は、露出時間は短く解像度は高いがノイズの多い画像と、露出時間は長く解像度の低いがノイズの少ない画像を交互に連続して撮影する機能を有している。短時間露出画像をベースに、時系列的にその前もしくは後ろのいずれかの画像と合成処理する際、よりノイズの低減を図るために、合成に適した画像を判別する手段を設ける。
位置ズレを補正したそれぞれの長時間露出画像との差分絶対値の総和が小さい方がブレが小さいと判断して、そちらを合成対象とする。
(もっと読む)
映像合成装置および映像合成プログラム
【課題】カメラにより撮影したカメラ映像と、コンピュータグラフィックス(CG)処理により生成したCG映像とを合成するに際して、カメラ情報を得るための検出用マーカとして、安定的に検出・消去が可能なマーカを備えた映像合成装置および映像合成プログラムを提供する。
【解決手段】映像合成装置1は、検出用マーカとして、実空間に複数個LED光源の組を配置し、カメラ映像のフィールド画像に同期して、オン(点灯)とオフ(消灯)とを交互に繰り返して点灯または消灯させることを特徴とするものであって、マーカ点灯制御手段4と、オブジェクト位置検出手段5と、カメラ情報抽出手段6と、CG映像生成手段7と、カメラ映像記憶手段8と、オブジェクト消去手段9と、実写・CG映像合成手段10と、テンプレート記憶手段11と、CGデータ記憶手段12と、を備える構成とした。
(もっと読む)
車両用障害物認識装置
【課題】自車に対する周辺物体の相対位置や相対速度を計測するセンサと、単眼カメラとを用いる場合にも、障害物を認識することができる車両用障害物認識装置を得る。
【解決手段】センサからの出力により、障害物を判定し、警報出力及び障害物回避を行うCPU130は、ミリ波レーダ110からの出力を演算する物体情報演算手段131と、カメラ120からの画像を取得し、画像処理する画像処理手段134と、車両の運転状態を取得する車両情報取得手段133と、少なくとも物体情報演算手段131及び車両情報取得手段133の出力に基づき、障害物を判定する障害物判定手段135と、この障害物判定手段135での判定に画像処理手段134の出力を用いるかどうかを判定する有効性判断手段138とから構成されている。
(もっと読む)
2,201 - 2,220 / 3,964
[ Back to top ]