
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
401 - 420 / 1,739
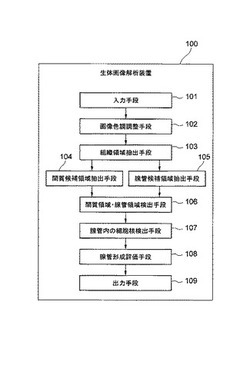
病理組織画像解析装置、病理組織画像解析方法、病理組織画像解析プログラム
【課題】病理組織画像解析による病理診断における癌の鑑別精度を向上させること。
【解決手段】生体組織画像における組織領域内に含まれる腺管の特徴を示す腺管特徴情報に基づき前記画像から腺管領域を検出する間質領域・腺管領域検出手段106と、検出された腺管領域内に含まれる細胞核を予め設定された色素基準に基づき抽出する腺管内の細胞核検出手段107と、各腺管における予め設定された基底部領域に対する細胞核の分布状態に基づき前記腺管の異型度を算出する腺管形成評価手段108とを備えた。
(もっと読む)
画像処理装置及び画像処理方法

【課題】読取原稿中に挿入された色地原稿や印画紙写真を検出し、その検出結果に応じて最適な地肌除去を行う。
【解決手段】 画像処理装置は、原稿を読取り、電子画像データを取得する画像読取装置、前記電子画像データから地肌を検出する地肌検出手段33と、取得された電子画像データから網点領域の有無を判定する網点判定手段35と、取得された電子画像データから色情報を検出する色/ベタ判定手段34とを有し、原稿種判定手段36は、前記色/ベタ判定手段34により検出された色情報に基づき、原稿に色地領域、印画紙領域が含まれるか否かの判定を行い、前記原稿種判定結果に基づき地肌除去の制御を行う。
(もっと読む)
距離計測装置及び距離計測方法
【課題】対象物の検出誤差に起因する距離検出精度の劣化を十分に抑え、撮像した対象物との距離を高精度に計測する距離計測装置及び距離計測方法を提供する。
【解決手段】第1〜第3部位検出部101〜103は、対象物の撮像画像から、対象物に含まれる、サイズが既知である複数部位の部位画像を検出する。相対誤差比較部104は、部位検出部101〜103により検出された複数部位の画像サイズD1〜D3と、複数部位において既知であるサイズに関する情報とを用いて、画像サイズD1、D2、D3と画像サイズに含まれる誤差d1、d2、d3との割合である相対誤差d1/D1、d2/D2、d3/D3を最も小さくする部位画像サイズを選択する。距離推定部105は、選択された部位画像サイズを用いて対象物の距離を算出する。
(もっと読む)
統合デプス推定
様々なインプリメンテーションが説明されている。かかるインプリメンテーションは、複数のデプスマップに対する統合デプス推定に関連している。一つの実施例において、第1の画面における位置に対する第1のビューデプスインジケータが推定され、第2の画面における対応する位置に対する第2のビューデプスインジケータが推定される。第1のビューデプスインジケータ及び第2のビューデプスインジケータの1つまたは複数の推定は、制約に基づいている。制約は、前記第1のビューデプスインジケータと前記第2のビューデプスインジケータとの関係を対応する位置に提供する。  (もっと読む)
(もっと読む)
画像診断処理装置
【課題】 被検体の内部を表す画像に含まれる異常候補領域が結節のような解剖学的異常であるか否かを高精度に判定することを可能とする。
【解決手段】 画像診断処理装置は、被検体の内部を表す画像に含まれる異常候補領域と重なるかあるいは連続する構造に相当する周辺領域とを特定する第1の手段と、前記の構造に相当する領域を3次元的に探索する方向を求める第2の手段と、前記探索方向に沿った複数の位置に対応する特徴量を求める第3の手段と、前記複数の位置における特徴量に基づいて、前記異常候補領域が解剖学的異常領域であるか否かを判定する第4の手段とを備える。
(もっと読む)
レーザ計測装置を用いて被計測物を複数方向から同時計測するシステム
【課題】大量の遺物を複数方向から同時計測し、欠損の少ない遺物単位の三次元表面モデルを取得する、レーザ計測装置を用いて被計測物を複数方向から同時計測するシステムを提供する。
【解決手段】ガラステーブル11上に載置した複数の被計測物R1〜R4及び計測用マーカ16に対し、上下方向からレーザを照射し上記複数の被計測物及び計測用マーカの三次元座標の計測データを取得する複数のレーザ計測装置12〜14と、モデリング生成部15とからなる。モデリング生成部15は、計測用マーカ16に関する特徴線について位置合わせを行い、幾何変換行列を獲得した後で、各レーザ計測装置12〜14から得られた単位点群を幾何変換して統合データを取得し、ラベリング技術を用いて被計測物毎の統合データに分離してメモリに記憶する。
(もっと読む)
携帯端末および顔識別システム
【課題】検索用サーバを必要とすることなく、携帯端末において比較的簡易かつ迅速に顔識別を行うことができるようにするものである。
【解決手段】第1の端末100aは、撮影により得られた画像中に存在する顔を検出し、顔データを周囲の携帯端末100b〜100gへ近距離無線通信により送信する。この送信した顔データに第2の携帯端末100b〜100gが自端末内に保存している当該ユーザの顔画像とマッチング(顔識別)を行う。第1の端末100aは、該当する顔画像を保存している第2の端末100b〜100dから当該ユーザのユーザ識別情報を近距離無線通信により受信し、そのユーザ識別情報を当該顔画像に対応づけて表示画面上に表示および/または記憶部に記憶する。
(もっと読む)
血糖レベルの非侵入的測定
【課題】本発明は、一般に人体又は他の生物学的実体の一部である物質、例えば、血液中のグルコース・レベル、すなわち、血糖値、の非侵入的なテスト、評価、又は決定を行なうためのシステム及び装置を提供する。
【解決手段】本発明の非侵入的測定システムは、生物学的実体、例えば、人の血液、から反射された波データを受信して、受信された波データをその生物学的実体内の物質、例えば、グルコース分子と相関関係付ける。波は光波や赤外線波である。受信された波データはピクセルの行列を形成する。ピクセル行列は、マスキング、ストレッチング、又はホットスポット除去等の修正ができる。そして、ピクセルはグルコース・レベルと相関関係付けられる積分値値を得るために積分される。相関関係付けは、特定の生物学的実体について較正されたルックアップ・テーブルを使用することができる。
(もっと読む)
走行支援装置および走行支援方法
【課題】自車両が走行する走路に、物体が飛び出す可能性を適切に算出することができる走行支援装置を提供する。
【解決手段】車両前方を撮像する撮像手段10と、撮像した画像の情報に基づいて、画像中で移動した物体のエッジ成分を抽出する抽出手段と、画像中の所定領域において、抽出手段により抽出されたエッジ成分に対応する画素が複数連続してなる画素列を構成する各画素のうち、高さ方向において最も下側に位置する画素の位置を最下点位置として検出する最下点位置検出手段と、車両の進行方向に沿って、最下点位置同士を結ぶ直線を、自車両が走行する走路の境界線として検出する境界線検出手段と、を備える走行支援装置において、最下点位置に基づいて、自車両の進行方向の空間と交差する空間である交差空間を検出する交差空間検出手段と、検出された交差空間に基づいて、自車両が走行する走路上に、物体が飛び出す可能性を算出する算出手段と、を有することを特徴とする走行支援装置。
(もっと読む)
人物追跡方法、人物追跡装置および人物追跡プログラム
【課題】本発明は、カメラで捉えた人物の動きを追跡する人物追跡方法に関し、カルメンフィルタなどを用いた追跡処理と比べ軽い処理で人物を追跡する。
【解決手段】各フレーム画像上の頭部を検出し、各フレーム画像上に頭部が検出された人物を特徴づける特徴量を、該各フレーム画像ごとおよび各頭部ごとに算出し、過去のフレーム画像上に頭部が検出された各人物の過去のフレーム画像上の各特徴量と、今回のフレーム画像上に頭部が検出された各人物の今回のフレーム画像上の各特徴量との間の、特徴量どうしの一致の程度を表わす関連度を算出し、各関連度のうちの閾値以上の一致の程度を表わす関連度であってかつ最大の一致の程度を表わす関連度の算出の基になった頭部を同一の人物の頭部である旨、判別する。
(もっと読む)
テレビ制御装置
【課題】テレビの前の視聴者の顔を認識し、その結果によってきめ細かなテレビの制御を行う事が出来る様にする。
【解決手段】視聴者の顔を撮影するカメラと、前記カメラで撮影された顔を認識しテレビ制御装置までの距離を演算する演算手段と、上記演算手段による演算結果に応じてテレビを制御する制御手段と、上記演算手段の条件を設定できる条件設定手段を備え、更に望ましくは、上記演算手段が、認識した顔の大きさにより、テレビ制御装置までの距離を演算する事ができ、上記演算手段が同時に複数の視聴者を認識した場合に、テレビ制御装置もしくはテレビに一番近いと判断した視聴者の演算結果に応じて、制御手段がテレビを制御する様にする。
(もっと読む)
人物追跡方法、人物追跡装置および人物追跡プログラム
【課題】本発明は、カメラで捉えた人物の動きを追跡する人物追跡方法に関し、実測等を行なわずに撮影画像だけで撮影画像と三次元実空間との対応関係の情報を得、その情報を生かすことで軽い処理で人物を追跡する。
【解決手段】被計測空間を斜めに見下す位置に設置され被計測空間を撮影するカメラによる撮影画像に写し込まれた人物頭部の寸法と撮影画像上の高さ位置との間の、統計的に平均的な対応関係を算出しておき、フレーム画像上の頭部の位置および寸法を検出し、フレーム画像における頭部の位置および寸法と上記の対応関係とに基づいて、今回の計測対象フレーム画像における頭部が、過去の計測対象フレーム画像上の頭部を持つ人物と同一の人物の頭部であることの蓋然性を表わす運動特徴量を算出し、その運動特徴量を用いて、今回のフレーム画像における頭部が、過去のフレーム画像上の頭部を持つ人物と同一の人物の頭部であるか否かを判別する。
(もっと読む)
正射投影画像を作成するための画像処理方法、装置およびプログラム
【課題】 撮影による画像の取得から正射投影画像の作成までを簡易化し、正射投影画像を精度良く作成する画像処理方法、装置およびプログラムを提供する。
【解決手段】 本発明は、所定間隔で離れた二つの標点を持つ被写体が対象面上に配置された状態で対象面を撮影機器によって撮影した画像の情報、撮影条件に関する情報および撮影機器の光学特性に関する情報を取得する情報取得工程と、撮影条件に関する情報および撮影機器の光学特性に関する情報から射影変換式を定めた上で、被写体における二つの標点間の距離情報を考慮して射影変換式を決定する要素を調整し、調整された射影変換式に基づき、撮影画像を正射投影画像に変換する画像変換工程とを備える。
(もっと読む)
写真計測用画像処理装置、それを用いた現場記録システム、荷物記録システム並びにレーザ加工システム
【課題】1台のカメラを用いて建築構造物等の写真計測が行え、建造過程の品質管理の向上を図る写真計測用画像処理装置の提供。
【解決手段】1台のカメラと、計測用治具と、表示手段と入力手段と演算手段と記憶手段とデータ転送手段を有する情報演算端末を備えた写真計測用画像処理装置において、計測用治具は矩形頂点を形成する4点の写真計測用基準点を有する方形平板等の構造とされ被計測対象に隣接配設され、情報演算端末は記憶手段が予め算出されたカメラの内部標定要素を記憶し、データ転送手段がカメラを用いて撮影された被計測対象および計測用治具をカメラ視野内に含む1枚の画像を取り込み、演算手段が取り込んだ1枚の画像からカメラ画像と実座標の関連情報と外部標定要素を算出し、画像上の少なくとも2点以上の選択されたポイントの計測用治具のなす平面、その平行平面、及びそれらと既知の交角をもつ平面上での2次元座標位置や距離を計測する。
(もっと読む)
ロボットの干渉防止方法
【課題】簡便な方法にてロボットに接近する物体の有無を検出する方法を提供する。
【解決手段】第1ロボットの第3腕に設置され焦点が固定された第3撮像装置を用いて第2ロボットを撮影し画像を生成するステップS1の撮影工程と、第1ロボットの回転台、第1腕、第2腕、第3腕を移動するステップS2の移動工程と、生成した画像に焦点のあった像である合焦点像が撮影されたかを検出するステップS3の画像判断工程と、合焦点像が撮影されたときに手部と第2ロボットとの間隔を狭くしないステップS4の干渉防止工程と、を有する。
(もっと読む)
ディスプレイを含む携帯電子機器、及び該機器の制御方法
携帯電子機器(10)は、ディスプレイ(12)と、ユーザ位置推定部(12)と、ディスプレイ移動推定部(14)と、を含む。上記ユーザ位置推定部(12)は、ディスプレイ(12)に対するユーザ位置を推定し、上記ディスプレイ移動推定部(16)は、ディスプレイの移動を推定する。上記機器(10)は、少なくとも第1の時点で、初期ユーザ位置と呼ばれるユーザ位置を推定し(s10)、第1の時点の後の期間に、ディスプレイの移動を推定し(s22)、上記ディスプレイの移動及び上記前記初期ユーザ位置に基づいて表示コンテンツを制御する(s28)ように構成されている。また、本発明は、そのような機器(10)の制御方法及びそのコンピュータ・プログラムに関する。 (もっと読む)
パンタグラフ変位測定装置及びトロリ線硬点検出方法
【課題】パタンマッチング処理の精度を向上させることを可能とするパンタグラフ変位測定装置及びトロリ線硬点検出方法を提供する。
【解決手段】ラインセンサカメラ2によってマーカを撮影した画像を処理することによりパンタグラフの加速度を求める画像処理部5Aが、入力画像を作成する入力画像作成部5aと、テンプレートを設定するテンプレート設定部5bと、入力画像を分割する画像分割処理部5cと、テンプレートの拡縮を行うテンプレート拡大・縮小処理部5dと、入力画像上のマーカのピクセル位置を検出するパタンマッチング処理部5eと、マーカのピクセル位置をパンタグラフの実際の変位に変換するパンタグラフ変位計算部5fと、パンタグラフの変位に対して平滑化処理を行うフィルタリング処理部5gと、パンタグラフの加速度を出力する加速度出力部5hとを有する構成とした。
(もっと読む)
駐車支援装置、駐車支援方法及び駐車支援プログラム
【課題】 負荷の少ない方法で確実に停車すべき位置を認識できる駐車支援装置を提供する。
【解決手段】 駐車支援装置100は、車両後方を撮影して画像を取得するカメラ201と、車両後方に存在する障害物を検出し、車両後端から障害物までの距離を求める障害物検出部202と、車速を検出する車速センサ203と、障害物までの距離と車速とから、車両からその進行方向に伸びるガイド線を、障害物の手前位置を示す情報を付与したガイド線に修正するガイド線制御部205と、取得した画像と修正したガイド線とを合成し合成画像を作成する画像処理部207と、合成画像を表示するモニタ209を備える。
(もっと読む)
画像処理装置
【課題】 従来の画像処理装置は、ユーザが撮影対象としていない人物に対し、画像解析、または、画像処理結果の表示が行われてしまうという問題点があった。
【解決手段】 画像データから検出した顔の中から主被写体と関連被写体を選択し、これら主被写体、及び、関連被写体に対してのみ、所定の画像処理を行うか、あるいは、所定の画像処理の結果の表示を行う。この関連被写体は、主被写体の相関値に基づいて、複数の顔の中から選択される。
(もっと読む)
パターン認識システム及びパターン認識方法
【課題】上位カテゴリにおける物体の認識と下位カテゴリにおける特定物体の認識を、簡易な構成で実現することができるパターン認識システム及びパターン認識方法等を提供する。
【解決手段】パターン抽出部20は、画像取得部10により取得された画像データからパターン認識を行う部分画像を切り出す。特徴量算出部30は、パターン抽出部20により切り出された部分画像から所望の物体を認識するための特徴量を求める。尤度算出部40は、特徴量算出部30により求められた特徴量から認識対象である物体の尤度を求める。物体判別部50は、尤度算出部40により求められた物体の尤度からパターン抽出部20により切り出された部分画像が認識対象である物体かどうかを判別する。認識結果出力部60は、物体判別部50により認識された結果を出力する。
(もっと読む)
401 - 420 / 1,739
[ Back to top ]