
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
1,721 - 1,739 / 1,739
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
本発明の利点は、オブジェクトを適切に検出することである。本発明におけるオブジェクト検出装置は、オブジェクトまでの距離を決定する複数のカメラと、距離を決定する距離決定部と、ピクセルの距離に対するピクセル度数を特定するヒストグラム生成部と、最もありそうな距離を決定するオブジェクト距離決定部と、距離の差に基づくピクセルの確率を提供する確率マッピング部と、ピクセルのグループとしてカーネル領域を決定するカーネル検出部と、カーネル領域の近傍にあるピクセルから選択したピクセルのグループとして縁領域を決定する縁検出部と、オブジェクトが所定の確率で現れるオブジェクト領域を特定するオブジェクト特定部と、を有する。  (もっと読む)
(もっと読む)
奥行きマップの生成
画像(100)の各ピクセルについて観察者への距離を表す奥行き値を含む奥行きマップ(106)を生成する方法。該方法は:画像(100)を第一のセグメント(110)と第二のセグメント(108)にセグメント分割し;前記第一のセグメント(110)の第一の大きさに基づいて、前記第一のセグメント(110)のピクセルの第一のものに対応する奥行き値の第一のものを割り当て、前記第二のセグメント(108)の第二の大きさに基づいて、前記第二のセグメント(108)のピクセルの第二のものに対応する奥行き値の第二のものを割り当て、前記第一の大きさが前記第二の大きさよりも小さければ前記奥行き値の第一のものが前記奥行き値の第二のものよりも小さいようにする、ことを含む。 (もっと読む)
単一像から、3D物体の測定、モデリングおよびマッピングのためのシステム、コンピュータプログラムおよび方法
少なくとも1つの3次元物体の単一画像から、3次元測定情報を導出し、かつ/または3次元モデルおよびマップを作成するための方法が提供される。前記方法は以下のステップを含む。(a)物体の少なくとも1つの前記物体の2次元単一画像を取得し、該画像は画像データから構成されて画像幾何モデル(IGM)に関連付けられること、(b)IGMに基づいて、画像に関連付けられた3次元座標情報を導出し、3次元座標情報を画像データに関連付けること、(c)(i)IGMを使用して物体の投影を測定し、物体に関する高さおよび/または点間距離を含む測定データを導出し、かつ/または(ii)物体の影を測定し、物体に関する高さおよび/または点間距離を含む測定データを導出するように画像データを分析すること、および(d)物体の投影および/または影の測定に基づいて3次元測定結果を取得すること。前記方法の別態様において、前記方法は投影および/または影の測定に基づいて3次元モデルまたはマップを作成するステップをさらに含む。一連のアルゴリズムは、本発明の方法を処理するためにも提供される。少なくとも1つの3次元物体の単一画像から、3次元測定情報を導出し、かつ/または3次元モデルおよびマップを作成するための、コンピュータシステムおよび関連コンピュータプログラムも、開示した方法に基づいて提供される。 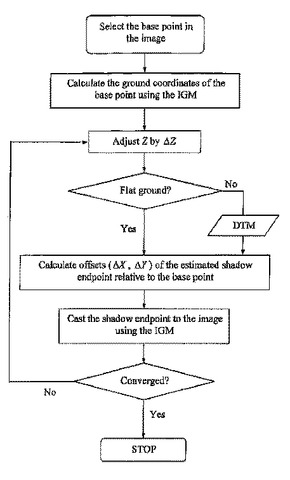 (もっと読む)
(もっと読む)
画像からの対象物検出方法及び対象物検出装置
画像の質や種類等に影響を受け難いロバストな画像処理方法によって、画像から良好に対象物(好適な例では、細胞)の位置あるいは/および個数を求める。画像から対象物を検出する方法は、着目画素を含む所定領域内の複数の画素の画素値に基づいて算出した該所定領域の特徴値を該着目画素のスコアとし、該画像における各画素についてスコアを算出するステップと、算出されたスコアの大きさ順に画素を選択し、選択された画素1から順に該所定領域と同一あるいは近似の領域を排他的領域2として該画像中に配置するステップと、該配置された一つあるいは複数の排他的領域の少なくとも一部を該対象物として検出するステップとを有する。好ましい態様では、当該画素のスコアが極大である場合に、当該画素を選択して、排他的領域を配置する。好ましい態様では、該特徴値は、該領域内の複数の画素の画素値の平均値である。 (もっと読む)
ステレオ検出器を使用して乗員および頭部ポーズを検出するためのシステムおよび方法
本願では、ステレオ検出器を使用して乗員および頭部ポーズを検出するためのシステムおよび方法を開示する。訓練ステージにおいて、ステレオカメラの対から同時に取り込まれたイメージの対が受信され、イメージの各対内の構成要素が識別される。各構成要素に対してフィーチャが関連づけられ、各フィーチャに対して値が関連づけられる。これらのフィーチャの中から、最も良好な判別能力を有するフィーチャのサブセットが選択され、イメージの対内の所与の構成要素に対して強いクラシファイアを形成する。検出ステージでは、入力されたイメージ対においてこの強いクラシファイアを使用して、構成要素が検出される。識別された構成要素は、乗員および該乗員の頭部ポーズを検出するために使用される。ステレオ検出がステレオマッチングと体系的に組み合わされることにより、乗員の検出および位置決定が改善される。  (もっと読む)
(もっと読む)
構造定位のための臨床ツール

【課題】医療介入中に、臨床医が、患者の体内の構造を定位するのを補助するシステムを提供する。
【解決手段】画像誘導プロシジャ中に体内構造を定位する方法は、1つの標的構造と選択された複数の基準構造とを含む体部分の3次元画像を取得すること、標的構造及び基準構造のそれぞれのロケーションを規定するための、ランドマーク点座標のセットを求めること、標的構造及び基準構造についてのランドマーク点のロケーションを関連付ける三角形パラメータを計算すること、並びに、画像誘導プロシジャ中に、基準構造が特定されている術中画像上に標的構造の推定されるロケーションをプロットするために、計算された三角形パラメータを使用することを含む。
(もっと読む)
映像に基づいたフォトリアリスティックな3次元の顔モデリング方法及び装置

【課題】 映像に基づいたフォトリアリスティックな3次元の顔モデリング方法及び装置を提供する。
【解決手段】 描写された多角形のメッシュモデルによって表現される3次元のフォトリアリスティックな顔モデル生成方法において、入力映像の正面及び側面の顔映像内の顔特徴を検出する段階と、特定顔の3次元形状を決定するために、検出された顔特徴を利用して初期モデルを変形させて3次元の顔モデルを生成する段階と、入力映像からフォトリアリスティックなテクスチャを生成する段階と、前記テクスチャを前記3次元モデル上にマッピングする段階と、を含むことを特徴とする3次元の顔モデリング方法。これにより、デジタルカメラのように相対的に高価ではない装置を利用してデータを獲得し、可能な限り自動化を具現して、完全でない入力データから望ましく実際の人間らしい顔のモデ
リング方法を提供する。
(もっと読む)
高磁場磁気共鳴撮像のための適応的画像均一性補正
磁気共鳴撮像スキャナ(10)によって収集された磁気共鳴撮像データから補正済み再構成画像を生成する装置が、収集された磁気共鳴撮像データから補正済み再構成画像を再構成する再構成プロセッサ(44)を含む。パラメータ計算プロセッサ(52)が撮像対象の少なくとも一つの特性を決定する。補正パターン調整プロセッサ(54)が保存補正パターンの族から前記少なくとも一つの特性に基づいて補正パターンを選択する。画像補整プロセッサ(56)が前記未補正再構成画像を、前記選択された補正パターンを使って補正し、補正済み再構成画像を生成する。 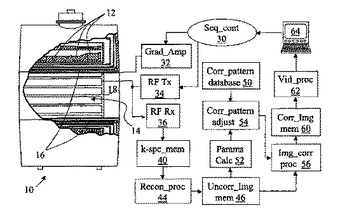 (もっと読む)
(もっと読む)
フィーチャー認識のための装置及び方法
顔認識システムは画像センサ(100)を備え、当該画像センサ(100)の出力は、検出モジュール(102)へと送られ、検出モジュール(102)の出力は、認識モジュール(104)へと送られる。検出モジュール(102)は、未知の個数の顔を検出して位置を特定することができる(存在する場合)。当該手順の主要部分の後には、セグメンテーションが実施される、即ち、当該画像内の顔候補の領域が選択される。その後、小さすぎる領域を取り除き、且つ、取り扱う選択領域について特定の縦横比を指定することによって、結果をより信頼できるものとすることができる。認識モジュール(104)は、検出モジュール(102)から受け取ったデータを、既知のフィーチャーからなるデータベース内に記憶されたデータと照合し、「一致度」が、予め定められた信頼性レベルよりも高いと判定された場合には、関連する被写体の識別情報が、出力の信頼性のレベルを示す信号と共に、当該システムの出力へと送られる。当該システムは更に解析器(106)を含み、出力の信頼性のレベルが、予め定められた閾値(比較器(108)によって設定される)よりも低いと判定された場合には、検出モジュール(102)の出力は、解析器(106)にも送られる。解析器(106)は、信頼性の低さの理由を判定するために、検出モジュール(102)からのデータの少なくとも一部について評価を行い、更に、例えば「カメラに近寄って下さい」「左/右に動いて下さい」等の言葉による指示を指示対象の被写体に与えるために、音声合成器(110)へと信号を出力する。出力の信頼性が、予め定められた閾値に達している場合には、例えば言葉によるグリーティングが、被写体に示されるようにしてもよい。  (もっと読む)
(もっと読む)
生体の顔認定システム
被験者の顔が現実の被験者の顔か否かを評価するシステム。被験者の顔が種々のイリュミネーション条件下で照らされ、被験者のイメージが種々のイリュミネーション条件に対して得られる。種々のイリュミネーション条件で得られるイメージ間の差分を使って被験者の顔が現実の人の顔かどうかを判定する。 (もっと読む)
ラスタ画像データセットの品質管理
ラスタ画像データの、出力ごとの関連品質パラメータを正確かつ客観的に評価・制御し、また、ラスタ画像データの状態に基づく品質欠陥を、出力前に高い信頼性で認識する方法を提供するために、ラスタ画像データセットの品質管理を行うこの方法において、評価装置により、ラスタ画像データセット内において、出力のための技術的適性より高度な、出力ごとの品質パラメータも測定され、少なくとも一つの選択された出力方法のための少なくとも一つの参照パラメータと比較することによりこれが評価される。  (もっと読む)
(もっと読む)
画像処理装置
【課題】バスのデータ転送量やメモリ容量を増大させることなく歪補正処理を行うことができる画像処理装置を提供する。
【解決手段】光学系による光像をCCD1で撮像して得られる画像データをバス11を介して入力し記憶するフレームメモリ4と、このフレームメモリ4から画像データをブロック単位で行方向に読み出して入力し列方向に変換して出力する第1データ順序変換部5と、この第1データ順序変換部5とパイプライン処理可能に接続され画像処理を行うイメージプロセス部6と、このイメージプロセス部6とパイプライン処理可能に接続され歪補正処理を行う歪補正処理部7と、この歪補正処理部7とパイプライン処理可能に接続され列方向のブロックデータを行方向のブロックデータに戻して上記フレームメモリ4へ出力する第2データ順序変換部8と、を備えたデジタルカメラに適用された画像処理装置。
(もっと読む)
蛍光発光画像の分析及び表示
【課題】歯の1つ以上の静止画に基づいて、損傷内の歯の組織に対する損傷及びカルシウムの減少を視覚化し、計測し、モニタし、及び観察するためのシステム及び方法を開示する。
【解決手段】好ましくは、光学的フィルタを通して、青色の励起光に対するその組織の蛍光発光応答を観察する。この画像は、本画素の光学的成分の関数に基づいて解析され、好ましくは、1以上の閾値に対する光学的成分間の比率を比較する。他の分析は、その歯が健常であれば有するであろう画素の強度を再構成するために、補間、及び/又は、曲線調整の技術を用いる。いくつかの実施例において、この再構成はユーザが指摘する画素の強度が健常な歯の組織に対応することに基づく。他の実施例において、これらの点は自動的に選択される。更に他の実施例において、時間経過とともに撮像された画像は、損傷の状態の動画において一連のフレームを生成するよう解析される。
(もっと読む)
画像処理装置、画像処理方法、デジタルカメラ、画像処理プログラムおよび可読記録媒体
【課題】固体撮像素子を用いたデジタルカメラで撮像され、画像中心部に比べて周辺部のホワイトバランスがずれて、画像周辺部が着色された画像を補正する。
【解決手段】赤外線カットフィルタ2を使用すると、被写体からの光の入射角度が大きくなる画像周辺部では、入射角度が小さい画像中心部に比べて、波長600nm付近の光透過率が低くなり、CCD3において赤色画素の感度が低下する。補正値算出部10によって、補正値記憶部9に記憶された各画素の分光感度差補正用の補正値データを用いて各画素の補正値を算出し、入力される各画素の画像信号に対して、補正可変ゲイン11によってR信号の補正を行って、赤色画素の感度低下分を補正する。
(もっと読む)
舌映像からの関心領域の抽出方法及び舌映像を利用した健康モニタリング方法及び装置
【課題】 舌映像からの関心領域の抽出方法及び舌映像を利用した健康モニタリング方法及び装置を提供する。
【解決手段】 (a)各個人別に撮影された舌映像、テンプレート映像と少なくとも一つ以上の特徴要素に対する健康状態の判別結果を対応させたデータベースを構築する段階と、(b)個人の舌映像から分割された舌領域でテンプレート整合を利用して関心領域を抽出する段階と、(c)前記(b)段階で抽出された関心領域に対して少なくとも一つ以上の特徴要素を検出する段階と、(d)前記(c)段階で検出された特徴要素と前記データベースから検索される健康状態別の当該関心領域の特徴要素とから追跡される舌の状態変化から個人の健康状態を判別する段階と、よりなる。
(もっと読む)
画像処理装置、画像処理プログラムおよびディジタルカメラ
【課題】本発明は、解像度変換を行うことによって、任意の画像サイズの画像を文字などの情報が明瞭になるように画像処理し得る画像処理装置、画像処理プログラムおよびディジタルカメラに関する。
【解決手段】本発明にかかる画像処理装置は、画像の画像サイズを検出する画像サイズ判定部41と、検出結果に基づいて、画像の画像サイズが横方向および縦方向共に所定ブロックの対応する方向の長さに対して整数倍となるように、画像の画像サイズを変換する画像サイズ変倍部42と、変換した画像を画像処理する各部43〜50と、画像処理した画像を画像サイズ変換手段で変換する前の画像サイズとなるように画像サイズを再変換する画像サイズ変倍部42とを備えて構成される。
(もっと読む)
ビジュアルサーボによる位置姿勢制御方法
【課題】 ビジュアルサーボによる位置姿勢制御においてカメラの縦揺れ角および偏揺れ角(姿勢角)の検出精度向上を図る。
【解決手段】 ロボット本体11は、制御装置12により位置の移動と姿勢の駆動制御がなされる。CCDカメラ15は、ロボット本体11の上アーム20に固定され、ワークWを撮影する。あらかじめ参照画像として基準位置からワークWを撮影したデータを記憶させる。制御装置12は、カメラ15で撮影した画像と参照画像のデータとに基づいてビジュアルサーボにより位置姿勢の制御を行なう。収束した段階では、カメラ15を姿勢角を所定以上傾けて画像データを取得する。このとき各画像での姿勢角と参照画像のデータとの誤差値を演算し、誤差値が最も小さくなるときの姿勢角を推定し、補正量として求める。この補正量だけ位置姿勢を制御することで、精度の高い制御を行なうことができる。
(もっと読む)
画像処理装置、方法及び記録媒体
【課題】 顔領域が所定のサイズ比でトリミング領域内の所定位置に位置するようにトリミング領域を設定する際のオペレータ等の負担を軽減する。
【解決手段】 証明写真作成対象の画像に存在する人物の頭頂部位置を検出し(140)、両眼部位置を検出し(142)、人物の顎の先端に相当する位置のY方向(天地方向)位置を推定し(144)、頭上領域・顔領域・顎下領域のY方向のサイズ比が、証明写真種毎に定められた所定の比率となるようにトリミング領域のY方向位置及びサイズを設定する(146〜154)。また、両眼部の中央に相当する位置がX方向に沿ったトリミング領域の中央に一致し、トリミング領域のアスペクト比が証明写真種に対応するアスペクト比に一致するように、トリミング領域のX方向位置及びサイズを設定し(156〜162)、設定したトリミング領域を画像に重ねて表示する(164)。
(もっと読む)
画像解析システム,画像解析方法および画像解析プログラム記録媒体
【課題】 画像フレーム間における物体間の対応関係に一対多,多対一などの多様性を導入し,安定した物体の追跡と,複数の物体の合体,分離等の状態に関する情報の出力を可能にする。
【解決手段】 映像を構成する各々の画像フレームにおいて対象物が占める画像領域から対象物の位置と大きさを取得する。次に,近接する二つのフレームにおいて検出された対象物について,前のフレームの対象物が後のフレームの対象物へ移動した場合の遷移コストを,二つのフレーム上の対象物の組について計算し,遷移コストから二つのフレーム上の対象物の間の対応関係を分類し,対象物の状態を判定する。以上の対象物の対応関係を,複数の画像フレームからなる映像の区間内の全ての隣接するフレーム間に対して計算した結果の情報を利用して,個々の対象物の移動軌跡を複数の画像フレームに渡って追跡する。
(もっと読む)
1,721 - 1,739 / 1,739
[ Back to top ]