
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
321 - 340 / 1,739
照明制御システム

【課題】カメラの取り付け高さに関わらず、人体の検出精度を高く維持することができる照明制御システムを提供する。
【解決手段】制御部は、カメラ20の取り付け高さに応じて、人体の存否の判断基準となる閾値を自動的に決定する閾値決定手段としての機能を有する。閾値決定手段は、検知エリアA1の床面上の所定位置に設置される規定寸法の撮像指標T1をカメラ20で撮像し、得られた画像Im内での撮像指標T1の画素数に基づいて、カメラ20の取り付け高さに適合する閾値を決定する。人体検知部は、カメラ20で上方から検知エリアA1を撮像した画像より人体の候補となる領域を抽出し、当該領域の大きさを前記閾値と比較することで検知エリアA1内の人体の存否を検出する。
(もっと読む)
車両周辺監視装置

【課題】人体等の生体(哺乳動物)の温度に近いコンクリート等の壁等が電柱等により遮られた場合に発生する非生体(前記コンクリート等の壁)を生体と誤検知してしまうことを防止する車両周辺監視装置を提供する。
【解決手段】探索マスク領域101内に含まれる生体候補の形状の時間変化が所定以下であるとみなしたとき、生体候補を生体として認識するようにしたので、人体等の生体(哺乳動物)の温度に近いコンクリート等の壁等が電柱等により遮られた場合に遮られなかった人体サイズに近似する領域を生体と誤検知してしまうという不都合を防止できる。電柱等のオクルージョン物体に遮られた壁等で遮られなかった領域は、画像上、実空間上の形状が時間変化するのに対して、人体等の生体は、時間変化がないという知見も基づき誤検知を防止する。
(もっと読む)
照明制御システム
【課題】画像処理に係る処理負荷を軽減しながらも、人体の検出精度を高く維持することができる照明制御システムを提供する。
【解決手段】間引き手段は、画像Imに対し、それぞれ間引き処理後に残る有効画素P1のカメラの視野内での分布が異なる複数の間引きパターンのいずれかを適用して間引き処理を行う。照明器具が消灯しているときには、カメラの視野内への人体の進入を検出する必要があるので、カメラの視野の外周部分を重点的に監視するため、外周部分に集中して有効画素P1が分布する間引きパターンを適用する。一方、照明器具が点灯しているときには、カメラの視野内の人体の存否を検出する必要があるので、カメラの視野の全域に亘って監視するため、カメラの視野全域に有効画素P1が分布する間引きパターンを適用する。
(もっと読む)
立体的形状領域からなる光学式自動認識コード
【課題】3種類の高さの並びでデータを担持させ読み取りを行う高低差コードを新たに提案するものである。特に、高低差コードの周囲にノイズがある場合や、コード部分が傾いている場合でも、正確に切り出し、読み取りを行うことができる高低差コードを新たに提案するものである。
【解決手段】連続的に配列されている複数の立体的形状領域(凹凸)からなる光学式自動認識コードにおいて、高さ方向の共通の仮想基準平面が設定され、立体的形状領域の前記仮想基準平面に対する高さの配列によりデータを表す。
(もっと読む)
画像選択装置および画像選択方法
【課題】人の顔を含んだ画像データのうち、印刷に適した画像データを印刷対象の画像データとして効率よく選択可能とする。
【解決手段】印刷装置100は、メモリカードMC等から画像データを入力すると、その画像データ中に撮像された顔の領域を検出する。そして、この顔領域の大きさと位置とが、官能評価実験を行って許容範囲テーブルTBLに予め設定された許容範囲に収まる場合には、入力した画像データを印刷対象の候補として選択する。一方、許容範囲に収まらない場合には印刷対象としては選択しない。
(もっと読む)
夜間車両検知装置
【課題】夜間走行時における対向車両の光源と路上反射物とを識別し、車両前方の対向車両を精度良く検知することのできる夜間車両検知装置を提供する。
【解決手段】撮像手段によって撮像された画像内において、所定の第1閾値よりも大きな輝度を有する高輝度領域及び第1閾値より低く設定された第2閾値よりも大きな輝度を有する低輝度領域を抽出する領域抽出手段と、領域抽出手段の抽出結果に基づき高輝度領域に関連付けられた第1面積及び高輝度領域に近接する低輝度領域に関連付けられた第2面積を算出する面積算出手段と、面積算出手段により算出された第1面積と第2面積との比に基づいて、高輝度領域に対向車両の光源があるか否かを判別する判別手段と、を備える。
(もっと読む)
画像測定機
【課題】表示手段に表示される各要素の画像に基づいて、多数の要素を容易に指定することができる画像測定機の提供。
【解決手段】画像測定機1は、撮像装置2と、制御装置3とを備える。制御装置3は、制御装置本体4と、表示手段5と、操作手段6とを備える。制御装置本体4は、撮像装置2にて撮像される被測定物の画像に基づいて、測定対象となる複数の要素の情報を取得する要素情報取得部41と、要素情報取得部41にて取得される各要素の情報に基づいて、各要素の画像を表示手段5に表示させる要素画像表示部42と、操作手段6を介して各要素の画像における所定の範囲が選択されると、所定の範囲に含まれる各要素を指定要素として設定する指定要素設定部44とを備え、指定要素設定部44にて設定される各指定要素に基づいて被測定物を測定する。
(もっと読む)
齲蝕病変領域を抽出するための方法
【課題】歯の健康な領域から齲蝕病変領域を抽出するための方法。
【解決手段】歯のデジタル画像を生成するステップと、歯の領域を識別するステップと、マーカー制御式のウォーターシェッドアルゴリズムを用いることにより、又は多重解像度表面再構成と共に形態学的なボトムハットに基づく方法を用いることにより病変と疑われる領域を抽出するステップと、偽陽性のものを除去するステップと、を含む。あるいは、歯のデジタル画像を生成するステップであって、歯の蛍光画像を取得し、歯の反射率画像を取得し、蛍光画像と反射率画像の画像データを組み合わせるステップと、歯の領域を識別するステップと、病変と疑われる領域を抽出するステップと、偽陽性のものを除去するステップと、を含む。
(もっと読む)
車線内車両検出装置及び車線内車両検出方法
【課題】高速道路の道路表面から所定の高さで設置されたステレオ画像撮像装置により、前方の高速道路を撮像したステレオ画像に基づき、ステレオ画像撮像装置に向かって進行して来る高速道路上の走行車線内の車両を検出して、ほぼリアルタイムで検出した車両の位置・速度を表示する車線内車両検出装置を提供する。
【解決手段】前方の自車線と隣接車線を撮像して基準画像と比較画像を出力するステレオ画像撮像装置と、基準画像と比較画像に基づき、視差画像を生成する視差画像生成部と、車線・車両検出処理部とを備え、車線・車両検出処理部は、基準画像と視差画像に基づき、ステレオ画像撮像装置に向かって進行して来る自車線及び隣接車線内の車両を検出して、検出した車両の位置を、走行車線を表す平面上の2次元位置として表示するとともに、検出した車両の速度と衝突までの時間をも表示する。
(もっと読む)
ウエハ検査方法およびシステム
【課題】多重パターニングリソグラフプロセスについての定性的及び/又は定量的な評価を得る。
【解決手段】第1設計および少なくとも第2設計から成る目標設計に従って多重パターニングリソグラフプロセスを用いて得られるリソグラフパターンを評価する方法であって、目標設計とリソグラフパターンとを整列させることと、リソグラフパターンと整列した目標設計における第1設計および第2設計のオーバーラップ領域に基づいて、リソグラフパターン内の縫合領域を識別することと、リソグラフパターン内の識別した縫合領域に関して、所定の基準を満足しているか否かを決定することとを含む。
(もっと読む)
眼部検出装置
【課題】眼部を高精度に検出する眼部検出装置を提供することを課題とする。
【解決手段】被験者の眼部を検出する眼部検出装置1であって、被験者の顔面画像を撮像する撮像手段2と、顔面画像から目頭の位置を特定する目頭位置特定手段4bと、顔面画像から目尻の位置を特定する目尻位置特定手段4bと、目頭の位置と目尻の位置とを結ぶ瞼曲線を設定する瞼曲線設定手段4cと、瞼曲線を目頭の位置から目尻の位置している側とは逆方向に延長した延長線分と瞼曲線を目尻の位置から目頭の位置している側とは逆方向に延長した延長線分の少なくとも一方の延長線分を設定する瞼曲線延長線分設定手段4dと、延長線分における全画素の横方向のエッジ強度の合計値が閾値以上か否かを判定するエッジ強度判定手段4dを備え、エッジ強度判定手段4dでエッジ強度の合計値が閾値以上と判定した場合に瞼曲線を誤検出していると判断することを特徴とする。
(もっと読む)
移動検出装置および記録装置
【課題】 ダイレクトセンシングで物体の移動状態を高精度で且つ確実に検出すること。
【解決手段】 搬送ベルトには複数の孤立パターンから構成される検出用パターンがマーキングされている。第1画像データから切り出したテンプレートパターンに含まれる検出用パターンの一部が、いかなる場合も第2画像データのサーチ領域内で唯一の固有パターンとなるように、検出用パターンの中の複数の孤立パターンの形態、テンプレートパターンを切り出すテンプレート領域のサイズ、サーチ領域のサイズが関係付けられている。
(もっと読む)
撮影装置およびプログラム
【課題】 従来、撮撮影時の構図や、レンズ効果により、顔が小さく写るようにしたり、足が長く写るようにしたりするという要望に応じた撮影をすることができる場合もあるが、撮影時の構図に工夫が必要であったり、また、レンズ特性等の知識が必要となり、撮影に一定の習熟が必要とされて初心者にとって困難である。
【解決手段】 顔が小さく写るようにする等の要望に応じた撮影をする場合、撮影者は、部位特定手段によって特定した“パーツ”の“変化要素”、例えば、顔の大きさの変更内容を太枠31bにより指定した後、モニタ11に表示される案内情報40aの撮影方法に従い、例えば、被写体の配置を変えて撮影することにより、要望に応じた撮影をすることができる。この結果、補正画像と同等の所望の画像を撮影するために一定の習熟を必要とせず、初心者でも容易に所望の画像を得ることができる。
(もっと読む)
火源探査システム
【課題】遠方の広角監視を行う際の火源位置検出の精度劣化を抑制することのできる火源探査システムを得る。
【解決手段】監視領域の温度状態に応じた信号として赤外線カメラ(14)で取得された撮像データに基づいて、撮像データを構成する複数の画素値の中から所定閾値を超える画素値を検出することで火源位置の特定を行う制御部(11、12、13)を備えた火源探査システムであって、制御部は、撮像データを、赤外線カメラから各監視領域までの距離に応じてあらかじめ設定された複数のエリアに分割し、複数のエリアのそれぞれについて、距離に応じてエリアごとに設定された個別の補正係数を用いて、エリアごとに火源位置の特定を行う。
(もっと読む)
監視装置
【課題】監視装置設定時のユーザ負担を軽減することができる監視装置を提供すること。
【解決手段】撮像装置100において、3Dモデル生成部107が、世界座標で表された監視指定領域を規定する端点群に人物モデルを配置した3Dモデルを生成し、座標変換部105が、3Dモデルを画像座標系の2Dモデルに変換する。こうすることにより、監視指定領域の端部に人物が立ったときにその人物が撮影画像に映し出されるであろう推測画像を表示することができるので、カメラ101を好適な設定条件に容易に調整することができる。これにより、撮像装置100の設定時のユーザ負担を軽減することができる。
(もっと読む)
歯の領域を識別するための方法
【課題】齲蝕を早期検知する。
【解決手段】歯領域を識別するための方法。この方法は、歯の第1の画像から、あらかじめ定められた第1の閾値c1より高い強度データ値を選択することにより第1閾値画像を生成するステップと、前記歯の第2の画像から、あらかじめ定められた第2の閾値c2より高い強度データ値を選択することにより第2閾値画像を生成するステップと、前記第1閾値画像と前記第2閾値画像との共通部分から、少なくとも第1の歯領域を規定する暫定的歯領域画像を生成するステップと、前記第1の画像から、前記第1の閾値c1を超えるあらかじめ定められた第3の閾値c3より高い強度データ値を選択することにより、基準二値画像を生成するステップと、前記暫定的歯領域画像内の少なくとも前記第1の歯領域から、精密化された歯領域画像を生成するステップと、を含む。前記第1の歯領域は、前記基準二値画像内のオブジェクトに連結している。
(もっと読む)
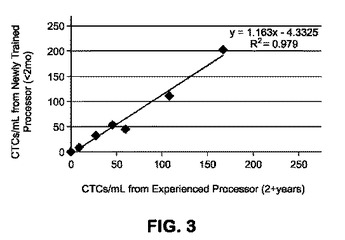
希少ではない細胞を用いて希少細胞を検出する方法
本発明は、希少ではない細胞からのデータを利用して循環性腫瘍細胞(CTC)などの希少細胞を検出する独創性に富んだ計算的な手法を提供する。本発明は、CTC検出の2つの異なる工程、すなわち、データ収集パラメータについて決定するための第1の工程およびデータの整理および解析の過程で決定を行うための第2の工程に適用可能である。さらに、本発明は、意志決定プロセスにおいて一次元および多次元のパラメータ化されたデータの両方を利用する。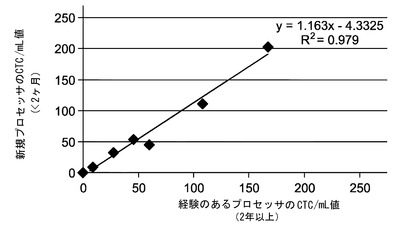
 (もっと読む)
(もっと読む)
眼底画像処理装置、及び眼底画像処理方法
【課題】 C/D比等の情報を対応する眼底撮影画像と共に的確に素早く確認できる眼底画像処理装置と眼底画像処理方法を提供する。
【解決手段】 眼底画像処理装置は、視神経乳頭部を含んだ第1眼底撮影画像から視神経乳頭部のディスクラインとカップラインを決定し,そのディスクラインとカップラインにより第1のC/D比を経線方向で360°求める第1C/D比取得手段と、視神経乳頭部を含む第2の眼底撮影画像から視神経乳頭部のディスクラインとカップラインを決定し,そのディスクラインとカップラインにより第2のC/D比を経線方向で360°求める第2C/D比取得手段と、第1眼底撮影画像と第2眼底撮影画像の少なくとも一方をモニタに表示させる表示制御手段であって,眼底撮影画像に対応するC/D比をグラフ表示される眼底撮影画像と同一画面に表示させる表示制御手段と、を備える。
(もっと読む)
水面境界線検知装置、水面境界線検知方法及び水面境界線検知プログラム
【課題】どのような壁面であっても1枚の画像から高速に水面の境界線を検知する。
【解決手段】座標変換処理部13が、カメラ3で撮影された1枚の画像における水面の境界が水平になるようにアフィン変換により座標変換を行い、第1ヒストグラム処理部14が、座標変換された水位画像の輝度値をヒストグラムの平坦化により変換し、第2ヒストグラム処理部15が、輝度変換された水位画像における水平方向の各ライン上の画素の輝度値を合算し、合算値が最大となるラインを壁面に対する水面境界線として検知する。
(もっと読む)
画像入力システム
【課題】3D画像を活用した画像入力システムを提供すること。
【解決手段】立体画像中に表示される複数のアイコンiには、立体画像における奥行き方向の位置が異なるアイコンが含まれており、当該アイコンiは、奥行き方向の位置情報を含む3次元位置情報によって、識別可能となっている。つまり、2次元平面における2軸の2次元位置情報のみからアイコンの識別を行っていた従来の入力システムと異なり、この画像入力システムでは、奥行き方向の位置情報を加えた3軸の3次元位置情報から、アイコンiの識別(選択)を行うため、より高度で、ダイナミックな識別を実現することができる。換言すれば、3D画像固有の奥行き方向の座標軸を活かした画像入力システムを提供することができる。
(もっと読む)
321 - 340 / 1,739
[ Back to top ]