
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
301 - 320 / 1,739
画像処理装置、画像表示システム、及び画像処理方法

【課題】表示画面に表示された表示画像をユーザーの手により遮られた状態でカメラにより撮影した撮影画像から、ユーザーの指先の位置を精度良く検出することのできる画像処理装置を提供する。
【解決手段】本発明の画像処理装置は、表示画面に表示されたモデル画像を、被検出物であるユーザーの手により遮られることなくカメラにより撮影した撮影情報に基づき、画像データから推定撮影画像を生成する推定撮影画像生成部と、画像データに基づいて表示画面に表示される表示画像を、被検出物により遮られた状態でカメラにより撮影した撮影画像と、推定撮影画像との差分に基づいて、表示画像内で被検出物により遮られた被検出物領域を検出する被検出物検出部と、被検出物検出部により検出された被検出物領域のうちユーザーの指先に該当する位置を指示位置として検出し、指示位置に対応した所定の処理を行うアプリケーション処理部と、を含む。
(もっと読む)
画像処理方法、画像処理装置、およびプログラム

【課題】画像データ群に含まれる画像データを表示する際に、当該画像データに関係する書き込み情報を表示すること。
【解決手段】第1画像データ群と第2画像データ群とを比較し、第1追加オブジェクトを抽出する。第1追加オブジェクトが抽出された画像データである対象画像データの投影の前に投影された画像データの第2追加オブジェクトを取得する。第1追加オブジェクトと第2追加オブジェクトの比較の結果し、第1追加オブジェクトに含まれるオブジェクトが新規オブジェクトか否かを判断する。新規オブジェクトの場合は、対象画像データに表示されるように第1追加オブジェクトを追加する。
(もっと読む)
複数の焦点面を用いた細胞特性決定
細胞を特性決定するためのシステムは、細胞を含む試料の一連のデジタル画像を取得する。それらの画像の各々は、異なる焦点面で撮影される。画像のうちの1つが、ベストフォーカス面で撮影されたものと判断される。システムは、ベストフォーカス面で撮影されたデジタル画像を解析し、さらにデジタル画像のうち他の少なくとも1つを解析して、これにより、試料中の細胞を生細胞または死細胞のいずれかとして分類する。 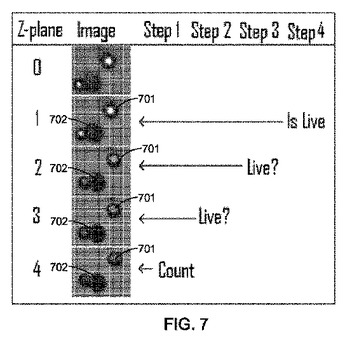 (もっと読む)
(もっと読む)
画像処理装置および画像処理方法
【課題】生成条件に合わせて画像を適切に変形させることのできる技術を提供する。
【解決手段】変形の度合いを調整する変形量調整部と、撮影によって生成された対象画像上の少なくとも一部の領域を前記調整された度合いで変形させる変形処理部とを備え、撮影時における対象画像の被写体と撮影装置との間の距離と相関のある距離パラメータを利用することによって、距離パラメータが示す距離が近いほど強くなるように変形の度合いを調整する。
(もっと読む)
医用画像の表示装置及び表示方法
【課題】前方画像を表示中に死角領域が生じた場合、死角領域の画像を含む後方画像を表示させることが可能な医用画像の表示装置及び表示方法を提供する。
【解決手段】管状構造物の内壁の画像を構成する各ボクセルを基に、管状構造物内に設けられた第1視点からの前方向の視野に含まれる前方画像を生成する前方画像生成部と、管状構造物の内壁の画像を構成する各ボクセルを基に、管状構造物内に設けられた第2視点からの後方向の視野に含まれる後方画像を生成する後方画像生成部と、表示部と、管状構造物内で移動させた第1視点の移動位置に応じて、第1視点からの前方画像を表示させていくときに、前方向の視野の死角となる死角領域が発生した場合に、死角領域の画像を含む後方画像を前方画像に代えて、又は、前方画像と共に表示部に表示させる表示制御部と、を有する。
(もっと読む)
作用機序スクリーニング法
本明細書の特定の様態は、スクリーニング方法に関する。一般論として、スクリーニングアッセイには、試験細胞を試験化合物と接触させて、接触試験細胞を提供すること、前記接触試験細胞の多数の細胞学的特性に対する値を得ること、および前記値を用いて細胞をスコア化し、多数の分類子の少なくとも1つに対する可能性スコアを提供することが含まれ、そこで、多数の分類子は、公知の作用機序の化合物と接触させた細胞から得た細胞学的特性に対する値を用いて定義される。 (もっと読む)
シーン内の正確な及び相対的な被写体距離を推定するためのアルゴリズム
シーン内の正確な被写体距離又は相対的な被写体距離を判断するのに、2写真整合曲線情報を使用することができる。この曲線情報に加えて異なるぼけ情報を有する2つの画像を取得することにより、デバイスは、シーン内の被写体の距離情報を判断することが可能になる。距離情報は、後で多くの画像処理アプリケーションに使用することができる奥行きマップを生成する段階を含む画像処理において使用することが可能である。 (もっと読む)
パターン計測条件設定装置
【課題】本発明は、複雑なパターン、或いは複数のパターンが配列され光近接効果の影響を評価すべきパターン等を有する試料に対し、欠陥座標等に基づいて、測定位置を設定する場合に、作業効率の低下を抑制しつつ、測定位置を設定することを目的とする。
【解決手段】上記目的を達成するために、パターンのレイアウトデータ上で設定される二次元的な領域に、複数の線分からなる基準線を重畳し、当該レイアウトデータ上の欠陥座標が存在するパターンを示す輪郭線の内側であって、当該輪郭線と、前記基準線の交点間に第1の計測位置を設定すると共に、当該輪郭線の外側であって、当該輪郭線と、当該輪郭線の他の部分或いは他の輪郭線との交点間に第2の計測位置を設定する装置等を提案する。
(もっと読む)
路肩検出装置及び路肩検出装置を用いた車両
【課題】走行路面と路外との境界である路肩に白線やガードレール等の立体物がなくても、画像情報から路肩を検出する路肩検出装置を提供する。
【解決手段】入力された車外環境の三次元画像情報から対象物の有無及び自車両から対象物までの距離を算出する距離情報算出部と、算出された距離に基づく距離画像から自車両が走行する走行路面を検出する走行路面検出部と、検出された走行路面と路外との高低差を測定する高低差算出部と、測定された高低差に基づいて、走行路面と路外との境界である路肩が、走行路面より低い路外がある場合の路肩か否か判定する路肩判定部と、を有する路肩検出装置。
(もっと読む)
画像処理装置、医用画像診断装置および画像処理プログラム
【課題】空間分解能の低い3次元医用画像から繊維性被膜の厚さを判定するための指標を提示すること。
【解決手段】血管内腔領域抽出部14、脂質コア領域抽出部15および冠動脈抽出部16は、3次元X線CT画像から冠動脈の血管内腔領域および脂質コア領域を抽出する。断面画像生成部17は、3次元X線CT画像から断面画像を生成する。血管内腔閉曲線抽出部18および脂質コア閉曲線抽出部19は、断面画像の血管内腔閉曲線および脂質コア閉曲線を抽出する。最短距離算出部110は、血管内腔閉曲線上の各点と脂質コア閉曲線の各点との最短距離を算出し、被膜領域抽出部111は、最短距離が閾値より小さい近接範囲を抽出する。占有率算出部112は、近接範囲の血管内腔領域に対する占有率を算出し、表示制御部115は、グラフ生成部113が生成した占有率グラフを表示部12のモニタにて表示させる。
(もっと読む)
推定装置及びその制御方法、プログラム
【課題】 三次元的に任意の位置姿勢をとりうる物体の位置姿勢を高精度かつ高速に推定するための技術を提供する。
【解決手段】 物体の位置姿勢を推定する推定装置であって、位置姿勢を推定する対象の対象物体を撮像する撮像手段であって、当該撮像手段から該対象物体までの距離情報を表す距離画像を生成する撮像手段と、前記距離画像を解析して前記対象物体の概略の位置姿勢を推定する概略推定手段と、予め定められた位置姿勢の範囲で物体の詳細な位置姿勢を推定する複数の識別手段と、前記概略推定手段が推定した前記概略の位置姿勢に基づいて、前記複数の識別手段の優先順位を決定する決定手段と、前記決定手段が決定した優先順位の順に、前記複数の識別手段を使用して前記対象物体の詳細な位置姿勢を推定する詳細推定手段とを備える。
(もっと読む)
窓検出装置及び車種判別装置及び窓検出方法及び車種判別方法
【課題】車両の窓を検出し、その検出結果に基づいて、車両の車種を判別する。
【解決手段】放射部111は、車両に対して放射光751を放射する。受光部115は、放射光751が車両に当たって反射した反射光754を受光する。反射位置算出部122は、放射部111が放射光751を放射してから受光部115が反射光754を受光するまでの時間に基づいて、放射光751が車両850に当たって反射した反射位置を算出する。窓検出部130は、反射位置算出部122が算出した反射位置に基づいて、車両の窓の位置を検出する。
(もっと読む)
移動体位置推定装置及び移動体位置推定方法
【課題】ロボットの位置を高精度に推定する。
【解決手段】パーティクルフィルタ処理部28が、ランダムに複数のサンプルを設定するサンプル事前設定部72と、設定されたサンプルをカメラ18にて取得されたターゲットの画像に基づいて評価するサンプル評価部74と、当該評価結果に基づいて複数のサンプルを再設定するリサンプリング部76と、サンプルの再設定後に、外部モデルに基づいてサンプルの修正処理を行う第1修正部78と、移動量検出部22の計測結果に基づいて、第1修正部78による修正処理後のサンプルを更に修正する第2修正部80と、を有しているので、移動量検出部に計測誤差がある場合であってもロボットの移動中に実測結果に基づいてサンプルの修正処理を適宜行うことで、ロボットの位置を高精度に推定することができる。
(もっと読む)
黒ライン補正装置、黒ライン補正方法及び画像形成装置
【課題】原稿画像から読み取ったライン上に現れるカラー部分を純黒色に補正するMFP10を提供する。
【解決手段】黒ライン補正部100は、原色カラー画像データの各画素の画素値から3次元色空間の位置ベクトルを生成する色空間変換部104、ライン幅を検出する線幅検出部103、ベクトル変換により複数の変換ベクトルを算出するベクトル変換部105、ライン幅に応じ候補ベクトルから変換ベクトルを選択するセレクタ106、3次元色空間の色ベクトルと判定値を記憶する3次元LUT108、変換ベクトルに対応する判定値を読み出すテーブル読出部107、判定値が純黒色の場合、画素に対し純黒色を出力する文字領域検出部110を備える。
(もっと読む)
道路認識装置
【課題】車両前方の撮像画像中から車線や横断歩道をリアルタイムで検出可能であり、横断歩道までの距離や横断歩道の距離方向の幅を検出可能な道路認識装置を提供する。
【解決手段】道路認識装置1は、自車両前方を撮像する撮像手段2と、画像T上の水平ラインj上を探索して車線候補点cr、clを検出する車線検出手段10と、車線候補点crに対応する車線の横幅が横断歩道の横幅に相当する横幅であった場合には、当該水平ラインjの探索領域Slを拡大し、当該水平ラインj上で輝度の繰り返しパターンが存在するか否かを判断するパターン探索手段11と、繰り返しパターンが存在する各水平ラインjをグループ化するグループ化手段12とを備え、グループ化手段12は、グループ化したグループの最も手前側の位置までの距離Znearを横断歩道までの距離Zcとして算出し、グループの実空間上の距離方向の幅Wzを横断歩道の幅Wczとして算出する。
(もっと読む)
車両の衝突を回避するための装置
【課題】交差点の見通し範囲を把握し、的確なタイミングで他車両との衝突回避動作を発動する。
【解決手段】車両の周辺の障害物の位置に基づいて、車両から前方を見通せる見通し範囲を算出する。見通し範囲外から車両に向けて接近してくる移動物体と衝突することなく、交差点を該車両が通過することが可能な通過可能速度VTを、見通し範囲に基づいて算出する。通過可能速度VTよりも車両の現在の速度VNが小さいとき、衝突回避のための制御を発動する。また、車両が交差点に進入するまでに停止可能な最大速度VSを算出し、車両の現在の速度VNが該停止可能速度VSより小さいときには、該現在の速度が通過可能速度VTより小さくても、衝突回避のための制御の発動を抑制する。見通し範囲の大きさに応じた通過可能速度VTを算出するので、見通し範囲に応じて運転者が取り得る速度を考慮しつつ、衝突回避の制御を適切なタイミングで発動させる。
(もっと読む)
顔方向特定装置及び撮像装置
【課題】簡素な処理で顔方向の特定が可能な顔方向特定装置及び撮像装置等の提供。
【解決手段】顔方向特定装置は、少なくとも撮影者の目を撮像可能な撮像部により撮像された撮像画像を取得する画像取得部と、取得された撮像画像に基づいて、撮影者の目領域での反射光の反射光情報を検出する反射情報検出部と、検出された反射光情報に基づいて、撮影者の顔方向を特定する顔方向特定部を含む。
(もっと読む)
家屋倒壊領域抽出システム、家屋倒壊領域抽出方法、及び家屋倒壊領域抽出プログラム
【課題】航空画像として地震発生後に撮影されたものだけを用いて、家屋倒壊領域を好適な精度で抽出する。
【解決手段】記憶装置6は、航空画像に現れる倒壊家屋、非倒壊家屋、植生等の地物についてのスペクトル情報を予め記憶する。演算処理装置4は領域分割手段20により、スペクトル情報に基づいて、航空画像を地物に対応した複数種類のオブジェクト領域に領域分割する。さらにテクスチャ解析手段24により、オブジェクト領域のテクスチャに基づいて、オブジェクト領域から倒壊家屋に対応した家屋倒壊領域を抽出する。
(もっと読む)
カメラ及び検索パターンを使用して対象物の空間特性を決定するためのシステム、装置、方法、及びコンピュータプログラム製品
【課題】対象物ホルダの上面に配置した対象物を評価するためのシステム、装置、方法、及びコンピュータプログラム製品を提供する。
【解決手段】対象物ホルダ110を複数位置の各々に位置させながら、対象物102の取得部分の一部を現す少なくとも1つの第一フレームを取得する。対象物ホルダ110を各位置に位置させながら、対象物ホルダ110の少なくとも一つの別の面の取得部分を現す少なくとも1つの第二フレームを取得する。取得したフレームのうち少なくとも1つのフレームに基づいて、対象物102の取得部分に関連した少なくとも一つの空間特性を決定する。各第二フレームにおいて取得した複数の光学マーカーの値を決定する。ここで、少なくとも上記光学マーカーのうち少なくとも2つはそれぞれ異なった値を有する。少なくとも一つの異なる面の上記取得部分の値及び向きに関連した少なくとも一つの座標が決定される。
(もっと読む)
幹線路合流情報提供システム
【課題】合流地点近くの側路にいる車両が適切かつ円滑に幹線路の流れに合流することが可能な、合流情報提供システムを提供すること。
【解決手段】本発明の幹線路合流情報提供システムは、側路と合流する幹線路上に設けられた2つのカメラにより合流地点へ向かう走行物体の時系列画像を取得し、この時系列画像上で垂直位置と前記監視領域の平面上での視差との関係を表す視差プロファイルを計算する。この視差プロファイルに基づいて、カメラから得られる画像に複数の処理領域を設定し、設定された複数の処理領域から検出された走行物体の大きさの変化、複数の処理領域の間隔から走行物体の速度を算出する。
算出された走行物体の速度から幹線路の状態情報を検知し、側路上に車両に対して表示する。
(もっと読む)
301 - 320 / 1,739
[ Back to top ]