
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
281 - 300 / 1,739
区画線検出装置
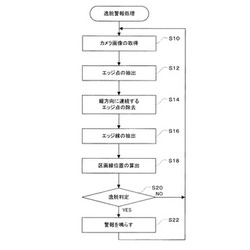
【課題】区画線を適切に検出する区画線検出装置を提供する。
【解決手段】画像処理ECUは、路面画像のデータを取得し(S10)、取得した路面画像に基づいてエッジ点を抽出する(S12)。次に、S12にて抽出されたエッジ点から縦方向に連続するエッジ点をノイズとして除去し(S14)、ハフ変換によってエッジ線の抽出を行う(S16)。次に、抽出したエッジ線に基づいて区画線位置の算出を行い(S18)、区画線の逸脱判定を行う(S20)。ここでは、ヨーレートおよび車両速度に基づいて予測した車両の走行軌跡と、S18にて算出した区画線の位置とから車両が区画線を逸脱するまでに要する時間を算出する。算出した時間が所定のしきい値以上であれば逸脱しないと判定し(S20:NO)、しきい値未満であれば逸脱の危険ありと判定し(S20:YES)、ブザー要求の制御信号を出力する(S22)。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラムおよび撮像装置

【課題】従来と比べて正確な位相差分布を生成することが可能な画像処理装置、画像処理方法、画像処理プログラムおよび撮像装置を提供する。
【解決手段】位相差検出部143Aは、複数の視差画像DC,DH,DVにおいて、相関値演算を行うことにより視差画像間の位相差を検出し、画像内の位相差分布DMを生成する。この際、画像内の水平方向および垂直方向の2方向に沿って個別に位相差検出を行うと共に、それら2方向についての位相差検出結果を利用して位相差分布DMを生成する。これにより、位相差検出の際に、従来と比べてエッジ領域の影響を受けにくくなる。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】ユーザが、異なる画風に変更された動画像において動きがある領域を認識しやすい、画像処理装置及び画像処理プログラムを提供する。
【解決手段】動画像を表す動画像データを取得する動画像データ取得部10a、動画像データ取得部10aが取得した動画像データにより表される動画像を構成する複数の静止画像の各静止画像間において動きがある領域を、静止画像毎に注目領域として特定する注目領域特定部10b、注目領域特定部10bが注目領域を特定した静止画像それぞれに対して画風を絵画調に変更する画像処理を、注目領域特定部10bが特定した静止画像内の注目領域と他の領域とで異なる内容で行う画像処理部10c、を備える。
(もっと読む)
医用画像処理装置、及び医用画像処理プログラム
【課題】非隆起型の病変部の形状が把握しやすい情報を生成することが可能な医用画像処理装置を提供する。
【解決手段】輪郭抽出部32は、ボリュームデータに基づいて管腔体の内壁の第1の輪郭を求める。病変部抽出部33は、第1の輪郭を基準にして内壁よりも外側の領域における画素の画素値に基づいて、病変部の位置を求める。推定部34は、病変部の位置と第1の輪郭とに基づいて、病変部が存在しない場合における内壁の第2の輪郭を推定する。隆起レベル算出部35は、第1の輪郭と第2の輪郭とに基づいて、病変部の凹凸の程度を求める。画像生成部4は、ボリュームデータに基づいて管腔体を表す画像データを生成する。表示制御部5は、凹凸の程度を示す情報と画像データに基づく画像とを表示部61に表示させる。
(もっと読む)
画像生成装置
【課題】動画から静止画を生成して、被写体の動きを再現しながら、瞬時に鑑賞可能な画像を得る。
【解決手段】 連続して撮影された複数の画像から主被写体を判定する主被写体判定部と、前記複数の画像のうちの少なくとも1枚の画像を選択コマとして選択し、1つ以上の前記選択コマから夫々前記主被写体の画像部分を用いた複製画像を生成する複製部と、前記複数の画像のうちの1枚の画像を台紙として選択し、前記台紙の画像上に1つ以上の前記複製画像を合成した合成画像を生成する合成部と、を具備したことを特徴とする。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】原画像中の領域の連続性を確保した周波数特性を得て画像強調などを行う画像処理装置を提供する。
【解決手段】帯域分解部11は、与えられた原画像を予め定められた周波数帯域ごとの周波数成分画像に分解する。強度算出部12は、各画素を順に処理対象画素とし、その処理対象画素を含む予め定められた大きさの局所領域について周波数特性を解析し、各周波数帯域における周波数成分の強度を算出する。帯域加重画像生成部13は、局所領域における各周波数成分の強度に従って、処理対象画素が属する周波数帯域を決定するとともに、局所領域の各画素に対して当該周波数帯域の加重値を割り当てて帯域加重画像を生成する。画像強調部14は、原画像に対して、帯域加重画像生成部13で生成した各周波数帯域の帯域加重画像における加重値に従って、対応する周波数帯域の強調処理を行う。
(もっと読む)
表面計測方法及び装置
【課題】計測対象物の平面部と凹部とを正確に分離可能な表面計測装置を実現する。
【解決手段】計測点読取処理110が読み取った計測点データは範囲外点排除処理111で範囲外データが排除される。最頻点抽出処理112は抽出した計測点データから最小二乗法で直線を作成し計測点と直線との差を作成する。ヒストグラムを作成し第1の閾値と平均値を算出し閾値と平均値とが同一とみなせるかどうかを判定する。同一ではない場合、閾値以下の計測データを排除し、直線近似から再処理を行い、閾値と平均値とを再度算出する。算出した閾値と平均値とが同一とみなせるまで処理を繰り返し実行する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】テンプレートマッチングによる対応点探索を行なうステレオマッチング手法において、隠れ領域が存在する場合でも簡易な処理で精度の高いマッチングを行なう。
【解決手段】境界画素指定部21は、被写体の影響によって第1の画像および第2の画像のいずれかにおいて写っていない領域である隠れ領域といずれにも写っている領域である非隠れ領域との境界に対応する1または複数の画素である境界画素を第1の画像および第2の画像においてそれぞれ指定する。相関計算範囲決定部22は、第1の画像および第2の画像における各境界画素に基づいて相関計算範囲を決定する。相関計算部13は、第1の画像における複数のブロック画像と第2の画像における複数のブロック画像との間のすべてまたは一部の組み合わせごとに、相関計算範囲に従って画素値の相関係数を算出する。
(もっと読む)
顔向き検知装置
【課題】ひとの顔の左右の顔端位置を精度良く検出し、顔向き方向の検知精度を向上させる。
【解決手段】顔向き検知装置10は、乗員カメラ12から出力された顔画像に基づき運転者の顔中心位置を検出する顔中心位置検出部22と、顔画像において運転者の顔を横断する複数の探索線を設定する探索線設定部23と、探索線設定部23により設定された複数の探索線に基づき複数の顔端位置を検出する顔端位置検出部24と、顔端位置検出部24により検出された複数の顔端位置毎に、顔中心位置検出部22により検出された顔中心位置に基づき、顔向き方向を検知し、複数の顔向き方向の中央値を運転者の顔向き方向として検知する顔中心位置検出部22とを備える。
(もっと読む)
動き認識リモコン受信装置および動き認識リモコン制御方法
【課題】画像認識に基づくリモコン受信装置で、被写体人物サイズが過小または過大であっても意図したタイミングでの制御を確実に行う。
【解決手段】原画像データのリサイズ処理手段2と、被写体人物の顔領域Kを検出する顔領域検出手段3と、顔サイズ比率が規定範囲を下回るときは画像サイズのより大きいリサイズ処理を、規定範囲を上回るときは画像サイズのより小さいリサイズ処理を行わせる顔サイズ比率判定手段4と、顔サイズ比率が規定範囲にありかつ検出顔領域が位置的に安定したときに安定した顔領域を基準にして画像認識領域Nを設定する認識領域設定手段5と、画像認識領域における任意の動作について時間軸での動きベクトル変化Vを抽出する動きベクトル抽出手段6と、動きベクトル変化が規定のものであるかの判定を行う画像認識手段7と、その判定結果に応じて制御信号Scを生成する制御手段8を備える。
(もっと読む)
生態系ネットワーク評価方法及びその方法を用いた生態系ネットワーク評価システム
【課題】生息適性が異なる複数の生物それぞれにとっての生息のしやすさを総合的に評価することが可能な生態系ネットワーク評価方法に関する。
【解決手段】本発明の生態系ネットワーク評価方法は、対象領域のリモートセンシングデータから、樹林によって被覆される土地区画である樹林パッチ、草地によって被覆される土地区画である草地パッチ、水辺に存在する緑地からなる土地区画である水辺緑地パッチを抽出する抽出工程(ステップS101)と、それぞれの樹林パッチに対応した樹林利用性生物のハビタット適性指数を算出する樹林利用性生物ハビタット適性指数算出工程(ステップS104)と、それぞれの草地パッチに対応した草地利用性生物のハビタット適性指数を算出する草地利用性生物ハビタット適性指数算出工程(ステップS105)と、それぞれの水辺緑地パッチに対応した水辺緑地利用性生物のハビタット適性指数を算出する水辺緑地利用性生物ハビタット適性指数算出工程(ステップS106)と、有することを特徴とする。
(もっと読む)
行動検出装置
【課題】対象とする人物の特定部位の検出やトラッキングを行うことなく顔全体の動きを検出することで、精度良く人物の行動を検出する。
【解決手段】カメラ2で撮像したドライバの顔周辺の画像がコントローラ3の画像入力部10に入力され、動き検出部12で入力画像の顔周辺に設定した領域全体の動きを算出する。そして、確認行動判定部14で画像動き情報と車両情報とに基づいてドライバの確認行動を判定し、判定結果に応じて出力部15から警報出力を行う。これにより、特定部位の検出を行う場合の検出精度の低下を回避し、また、特定部位を撮像するために制限されやすいカメラ設置位置を比較的自由に設定することが可能となる。
(もっと読む)
画像処理装置、画像処理方法及び画像処理用プログラム
【課題】高精度な移動物体検出を可能とする。
【解決手段】画像における1フレーム中のm×m(m:2以上の整数)画素を1ブロックとして、時間的に前後のフレームにおける対応する複数のブロックについてそれぞれの輝度データによる行列を前後のフレーム分作成する行列作成手段21と、前記対応する行列を用いて共分散行列を生成する生成手段22と、前記共分散行列から固有値及び固有ベクトルを求め、固有値及び固有ベクトルに基づき前後のフレームの対応する各ブロック間のユークリッド距離を求める演算手段23と、ユークリッド距離と閾値とを用いて画像処理を行う処理手段24とを具備する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理用プログラム
【課題】高精度にカメラ移動の検出を可能とする。
【解決手段】移動可能なカメラにより撮像された画像における1フレーム中のm×m(m:2以上の整数)画素を1ブロックとして、時間的に前後のフレームにおける対応する複数のブロックについてそれぞれの輝度データによる行列を前後のフレーム分作成する行列作成手段21と、前記対応する行列を用いて共分散行列を生成する生成手段22と、前記共分散行列から固有値及び固有ベクトルを求め、固有値及び固有ベクトルに基づき前後のフレームの対応する各ブロック間のユークリッド距離を求める演算手段23と、ユークリッド距離と閾値とを比較して比較値を検出する検出手段24と、前記検出手段による検出結果に基づき前記カメラの移動を判定する判定手段25とを具備する。
(もっと読む)
開眼度判定装置及び開眼度判定方法
【課題】外乱による影響を排除してより精度良く被験者の開眼度を検出可能な開眼度判定装置及び開眼度判定方法を提供する。
【解決手段】眼の撮影画像に基づき被験者の開眼度データを取得する開眼度検出部20と開眼度検出部20が取得した開眼度データに基づき被験者の開眼度を判定する閉眼・開眼判定部24とを備えた生体状態検出装置10において、閉眼・開眼判定部24は、開眼度検出部20が取得した開眼度データの内で、開眼度データが示す左右の眼の開眼度の差に応じて誤検知区間推定部22により選別された開眼度データに基づいて被験者の開眼度を判定する。両眼の開眼度が異なることは少なく、両眼の開眼度の差は外乱に密接に関係するため、左右の開眼度の差に応じて選別された開眼度データに基づき被験者の開眼度を検出することにより、外乱による影響を排除して被験者の開眼度をより精度良く検出できる。
(もっと読む)
車両周辺画像表示装置及び車両周辺画像表示方法
【課題】撮影した画像に3次元構造体(立体物)が存在している場合であっても、車両の乗員が直感的に理解しやすい鳥瞰画像を表示すること。
【解決手段】車両周辺画像表示装置100は、撮影画像において3次元構造体が映し出されている領域を特定する3次元構造体推定部21を備え、画像生成部22は、撮影画像を、3次元構造体の領域を除いて、地面を基準面とする鳥瞰画像に変換するとともに、3次元構造体に関しては、3次元構造体の各所の高さを考慮した鳥瞰画像へ変換する。従って、撮影した車両周辺画像に3次元構造体(立体物)が存在していても、従来に比較して、その3次元構造体の歪みを軽減した鳥瞰画像を表示することができる。
(もっと読む)
対象物検出装置及びプログラム
【課題】計算コストを削減して対象物を早期に検出する。
【解決手段】障害物推定部22で、レーザレーダ12の観測データ、及び車両センサ14の検出値に基づいて、障害物を検出すると共に、障害物の種類を推定し、死角領域推定部24で、障害物により形成される死角領域の位置、大きさ、及び死角領域境界線の長さを推定する。対象物推定部26で、死角領域推定部24の推定結果に基づいて、死角領域から出現する可能性のある対象物の種類を推定し、探索範囲設定部28で、死角領域の位置に基づいて、対象物の探索範囲を設定する。優先度設定部30では、探索範囲に優先度を設定する。探索条件設定部32で、死角領域推定部24の推定結果、及び自車両から探索範囲までの距離に基づいて、探索条件を設定し、対象物識別部36で、識別モデル記憶部34から対象物の種類に応じた識別モデルを読み出し、撮影画像の探索範囲から抽出されたウインドウ画像と照合する。
(もっと読む)
撮像装置、車載用撮像システム、路面外観認識方法及び物体識別装置
【課題】撮影環境によらずに簡易な構成で走行路面の境界を正確に検出することができ、安全な運転のための運転者への視認表示や車両制御への的確な情報を提供し得る撮像装置を提供する。
【解決手段】偏光カメラによって撮影した路面の垂直偏光画像と水平偏光画像とから偏光比を算出して偏光比画像を生成する。偏光カメラで撮影した画像の輝度情報に基づいて白線WLを検出し、内側のそれぞれの偏光比(走査用基準偏光比)を使って、1走査線ごとに画面の下から画面の上まで中央から左、右方向へ同じ走査線にある偏光比との差分を算出し、予め設定された閾値と比較することで、路端REを検出する。差分値が閾値以内の部分は×で表示し、閾値より大きい部分は黒丸で表示している。黒丸部分は路端REとして認識されたところである。
(もっと読む)
画像処理方法および画像処理装置
【課題】ディスク輪郭、カップ輪郭を自動点に決定し、緑内障の診断支援をより正確に効率的に行なう。
【解決手段】眼底画像から血管部分を消去し、所定の輝度しきい値より大きく面積が予め設定した標準ディスク面積と等しくなるような輝度領域を、標準ディスク面積を有する領域11として抽出する。標準ディスク面積を有する領域11を、その重心13から放射状に伸びる複数の分割線により複数の領域に分割し、分割された各領域S1を重心から放射状に角度をずらしながらスキャンして各領域ごとに輝度変化が最大となる点15aを求め、これらの点からディスク領域の輪郭線を求める。
(もっと読む)
画像処理装置、画像表示システム、及び画像処理方法
【課題】表示画面に表示された表示画像をユーザーの手により遮られた状態でカメラにより撮影した撮影画像から、ユーザーの指先の位置を精度良く検出することのできる画像処理装置を提供する。
【解決手段】本発明の画像処理装置は、表示画面に表示されたモデル画像を、被検出物であるユーザーの手により遮られることなくカメラにより撮影した撮影情報に基づき、画像データから推定撮影画像を生成する推定撮影画像生成部と、画像データに基づいて表示画面に表示される表示画像を、被検出物により遮られた状態でカメラにより撮影した撮影画像と、推定撮影画像との差分に基づいて、表示画像内で被検出物により遮られた被検出物領域を検出する被検出物検出部と、被検出物検出部により検出された被検出物領域のうちユーザーの指先に該当する位置を指示位置として検出し、指示位置に対応した所定の処理を行うアプリケーション処理部と、を含む。
(もっと読む)
281 - 300 / 1,739
[ Back to top ]